
自适应被抓取目标形状的柔性指端夹持器设计
2020-09-26 11:26胡祯刘吉成
机电信息 2020年23期
胡祯 刘吉成


摘要:研制了一种基于颗粒材料和气动真空原理的柔性指端夹持器。该夹持器采用弹性膜包裹颗粒材料的方式形成柔性指端,并配以气动装置,对于任何外形复杂的目标抓取对象,柔性指端夹持器无需识别物体外形,能够自适应改变指端形状,包裹住目标对象,以实现完全贴合、非刚性接触抓取目标。为了验证柔性指端夹持器的应用效果,设计了系统测试实验,实验结果表明,该柔性指端夹持器的抓取速度、抓取成功率和稳定性等均能满足使用需求。
关键词:柔性指端夹持器;颗粒材料;自适应构件外形;非刚性接触
0 引言
本文针对夹持器在抓取光学器件、芯片及外形尺寸复杂多变的构件时,需要夹持器具备自适应被抓取目标的外形尺寸,且非刚性接触的功能,提出了一种基于颗粒材料和气动真空原理的柔性指端夹持器,并通过实验验证了该夹持器应用的可行性以及柔性指端夹持器样机的工作性能。
1 柔性指端夹持器工作原理
机械手要稳定地抓取目标物体,必须满足抵消物体的重力、物体在手爪内不松动两个基本条件。本文所提出的柔性指端夹持器与被抓取目标间采用摩擦点接触,即力封闭,夹持器与目标物体之间的接触力并没有竖直向上的分力,即接触力无法与目标物体的重力进行平衡,因此二者接触时必然有摩擦力的存在,从而使目标物体的运动状态保持不变,达到抓取目的。颗粒材料被包裹在柔性膜中,柔性指端设计为球形,能更好地贴合目标物体,可以自适应被抓取目标的结构外形。颗粒材料之间会相互挤压,加上外部的膜具有很好的延展性与可塑性,因此柔性指端在接触目标物体的时候能改变自身形状,与目标物体有较大的表面接触面积,更有效地实现表面贴合。
针对较大平板类目标物体的抓取问题,为了形成有效的正压力,夹持器可以采用两种方式实现目标物抓取:
(1)增大柔性指端的尺寸,使其完全覆盖被抓取目标物体;
(2)将柔性指端的尺寸减小,采用多个柔性指端协同抓取的方式,使柔性指端与抓取目标结构外形自适应匹配,从而产生有效的抓取力。
2 柔性指端夹持器结构
2.1 机械结构设计
单体柔性指端夹持器主要由3部分组成,分别是基体、表面限制架和柔性组合体,如图1所示。基体内部中空形成一个气室,目的是使形成真空的过程有一个缓冲,不会损坏柔性组合体;表面限制架是为了限制柔性组合体的空间位移,使后者在一定范围内发生形变,防止其因不可抗力而破损,同时也能使其更好地贴合目标抓取物;柔性组合体由颗粒材料和弹性膜组成,弹性膜将颗粒材料包裹在内,形成一个球状物,更有利于抓取。
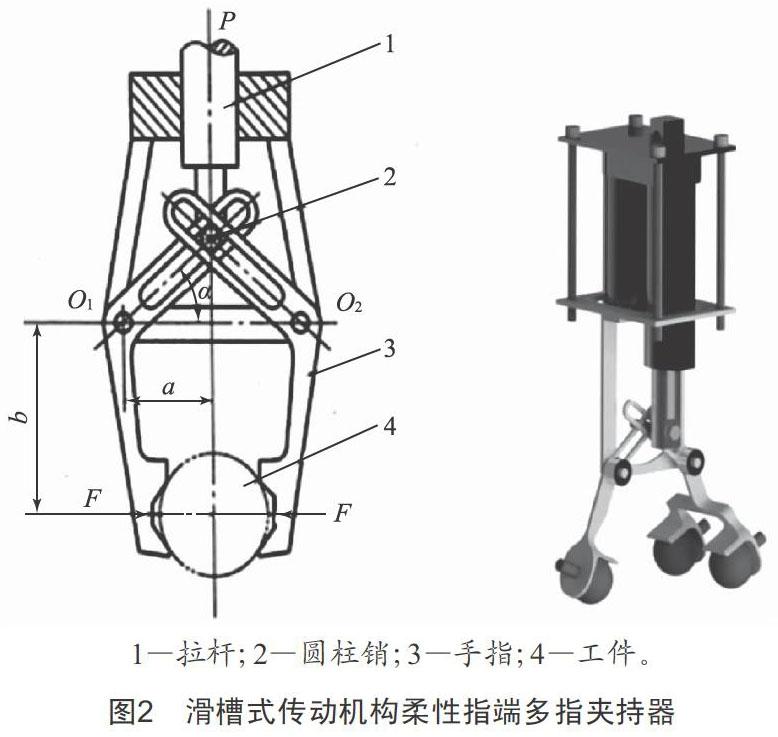
结合图1所示的单体柔性指端夹持器结构,为了适应不同尺寸及外形结构更加复杂的被抓取目标,确保抓取的稳定性,本文提出了柔性指端多指夹持器设计方案,夹持器主要采用滑槽杠杆式手部机构,如图2所示。
图2中,将拉杆1向上提拉时,圆柱销2可以在手指3的滑槽中移动,带动手指3绕O1、O2回转支点转动,使工件4被夹紧。当拉杆1向下运动时,工件被松开。
这种机构由于具有结构简单、动作灵活、手指张开角度大等特点,在工业机械手中的应用较为广泛。驱动力计算公式:
式中:P为正压力;a为O1到中心的水平距离;b为O1到抓取中心的距离;α为夹角;F为垂直力。
滑槽杠杆式手部机构使多个柔性指端相互聚拢,从而在接触表面产生垂直于重力方向的正压力。
2.2 气动回路设计
本文所使用的气源为空气压缩机,能输出压缩空气,但无法产生负压。因此,气路设计着眼于将正压变成负压。由流体力学可知,根据不可压缩气体的连续性方程可得:
式中:A1、A2为管道的截面面积(m2);v1、v2为气流流速(m/s)。
由式(2)可知,截面面积增大,流速减小;截面面积减小,流速增大。对于水平管路,不可压缩空气的伯努里理想能量方程:
式中:P1、P2分别为截面A1、A2处的相应压力(Pa);v1、v2分别为截面A1、A2处的相应流速(m/s);ρ为空气密度(kg/m3)。
由式(2)、式(3)可知,流速增大,压力降低。真空发生器的工作原理与文丘里管相同,是利用喷管高速喷射压缩空气,在喷管出口形成射流,产生卷吸流动状态,在卷吸作用下,使得喷管出口周围的空气不断被抽吸走,使吸附腔内的压力降至大气压以下,形成一定真空度。
3 系统实验测试结果
3.1 柔性指端夹持器填充物及压强选择实验
本文针对单体夹持器进行填充物选择实验,柔性膜形成直径50 mm的球体。颗粒材料直接影响机械手的抓取能力,颗粒物太小,颗粒间的空隙就会变小,抽真空时,整个球状物的体积变化不大,收紧程度不明显,产生的正压力较小,最大静摩擦力也随之变小,抓取效果不佳;颗粒物太大,颗粒间的空隙相对较大,柔性指端在贴合目标物体时可能会无法很好地覆盖目标物体,接触面积大大减小,贴合性就相对较差,这也会影响柔性指端的抓取能力。实验选取30目、60目、120目、220目4种颗粒大小的玻璃微珠,玻璃微珠质硬、耐磨性好,不会随实验的进行而细化,以抓取水笔作为目标,测试颗粒效果。
笔者通过实验结果可以发现,颗粒尺寸与抓取时间之间总体成线性关系,颗粒越大,抓取时间越短。30目颗粒的抓取过程最迅速,只需0.3 s;60目颗粒的平均用时为1.04 s,可得出结论:尺寸大于60目的颗粒材料都能实现快速抓取目标(此处不讨论颗粒过大产生的负面影响,如贴合性差、覆盖度低等)。
本文还讨论了气体压强对抓取速度的影响。优化实验采用抓取效果最好的30目的玻璃微珠,在0.1~0.6 MPa内对相同目标物体(螺丝刀)进行抓取测试,每个压强数值下进行10次测试,取平均值。通过实验可知,在压强小于0.2 MPa范围内,抓取时间与压强总体成线性关系,且抓取时间随压强增大而减小,0.1 MPa用时15.24 s,而0.2 MPa用时只需1.02 s,降幅明显;在压强大于0.2 MPa范围内,抓取时间几乎不随压强变化而变化,在现有实验条件下无法分辨其差别,0.3 MPa时的抓取速度已经达到0.52 s,完全满足实际应用需求。
3.2 柔性指端多指夹持器实验
在上述实验中,本文对填充物和气体压强进行了讨论,得到了装置设计的合理值。为了验证柔性多指夹持器的工作性能,本文以大尺寸平板抓取为实验对象,采用自行设计的柔性指端多指夹持器进行抓取实验。实验过程中利用推杆电机驱动夹持器,使手指夹紧,对柔性指端进行真空处理,使其产生垂直于重力方向的有效正压力,进而抓取平板类物体。此次实验测试了10次,都取得了成功。在抓取平板之后,还可以对平板进行翻转、摇晃等操作,平板与柔性指端贴合度好。相比于使用吸盘吸附平板,夹持器抓取平板减少了建立真空的时间,减小了吸盘吸附的结构尺寸,无需考虑贴合性问题。采用柔性指端与滑槽杠杆式手部机构结合的方式进行目标物抓取,能完美抓取包括长条形、球形及不规则外形的目标物体。
4 结语
本文基于颗粒材料和气动真空原理,设计了柔性指单体与多指端夹持器结构,并通过实验验证了该夹持器的工作性能。该夹持器能自适应各种不同结构、易碎及不可直接进行刚性接触的抓取目标,无需识别物体外形就能直接抓取,操作简单、高效。
实验表明,在填充物方面,建议采用尺寸为30~60目的颗粒材料,气源输出的气体压强控制在0.3 MPa以上,以产生相应的负压,保证较高的抓取速度、抓取成功率和稳定性。
柔性指端夹持器樣机实验表明,此夹持器对长条形物体、杯状物、平板类物体等复杂外形结构的物体展现出了极好的抓取性能,在贴合程度、抓取速度、抓取稳定性等方面都体现出了明显优势。
[参考文献]
[1] 刘培炎,吴松,付荣华,等.柔性机械手抓取能力影响因素的研究[J].机械制造,2017(2):6-9.
收稿日期:2020-08-04
作者简介:胡祯(1978—),男,上海人,工程师,研究方向:机械机构设计、几何量计量校准及检测方法。
