
基于脑-机接口技术的柔性体夹持机械手末端执行器系统设计*
2020-09-25 06:03程鼎豪刘新华
机电工程技术 2020年8期
程鼎豪,刘新华,金 康
(中国矿业大学孙越崎学院,江苏徐州 221116)
0 引言
近年来,随着脑科学、计算机技术和控制技术不断发展,脑—机接口技术(BCI,brain-computer interface)正在不断得到完善。BCI是一种不依赖于正常的由外围神经和肌肉组成的输出通路的通讯系统[1],该技术可以使人通过脑信号与电子设备连接沟通,是一种全新的通讯和控制方式[2]。
对于大多数残障人士而言,机械手能极大地提高他们的生活质量。国内外相关团队基于BCI对机械手控制方法进行了研究。美国布朗大学在瘫痪病人大脑中植入芯片,直接控制电脑的光标,并用电脑控制其他设备,实现了BCI的首次临床应用[3];Richard等[4]利用大脑皮层信号控制机器手抓紧物体;香港理工大学基于BCI-FES上肢康复训练系统,通过脑电波来控制功能性电刺激设备,从而实现腕部和手部的运动[5]。上述研究侧重于控制系统的研究,而目前的末端执行器多以刚性夹持为主,对于柔性加持的末端执行器研究较少。
残障人士常需要抓取柔性体,例如不同种类的水果等,常规的机械手末端执行器难以对柔性体进行稳定的夹持。本文设计了一种基于BCI的机械手末端执行器,包括机械手结构和控制系统设计,可对抓取物体表面产生的轻微的压痕,具有结构新颖、夹持稳定和自动化程度高等优点。
1 末端执行器总体方案
基于BCI技术的末端执行器总体设计方案如图1所示。整个系统由脑电模块、蓝牙模块、控制模块和末端执行器组成。脑电模块包括信号采集系统和信号处理系统。信号采集系统负责脑电波的采集,信号处理系统负责对脑电波分析和传输,经蓝牙模块传给控制模块,由控制模块转换成相应指令,控制末端执行器完成柔性体夹取动作。
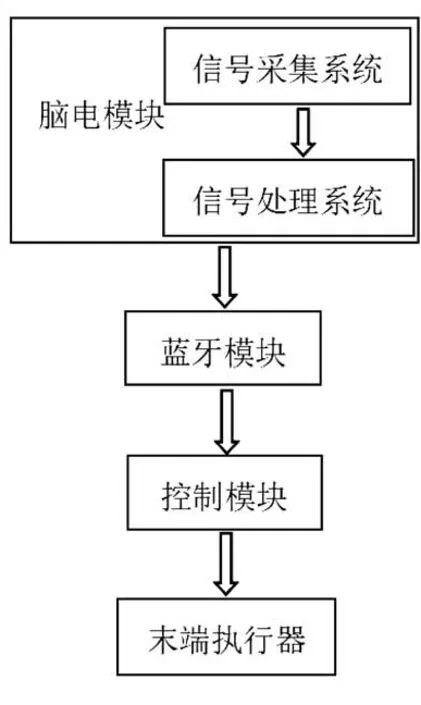
图1 总体设计方案

图2 末端执行器结构图
2 末端执行器结构设计及工作原理
末端执行器是指连接在机器人手臂末端的具有一定功能的终端执行机构,是夹持机械手的核心部件[6]。本文设计的末端执行器能够实现夹持器的向下压力和圆周夹紧力。
2.1 结构设计
末端执行器结构如图2所示,由气缸和弹性夹持机构组成,包括气缸、密封圈、盖板、垫片、推杆、液性塑料和夹持套。气缸为动力装置,夹持套为夹紧装置。
气缸安装在末端执行器上端,用螺栓连接在机械手臂上,带动推杆上下移动。夹持套为圆柱形结构,由弹性材料制成,内设填装液性塑料的半球形夹持套腔体,夹持套上部的盖板将液性塑料封闭在球形容器内。
夹持套外形为整体式,结构简单。夹紧部位为圆形,夹持角度广,适合夹持柔性体。夹持套的材料为ABS,其弹性模量E1=2×108Pa,可以产生较小的柔性夹持力,不会对目标物造成夹持伤害。
2.2 工作原理
在机械臂的作用下(本文不作研究),末端执行器移动至柔性体上方,气缸受控制系统作用,带动推杆上下移动。当推杆向下运动时,挤压夹持套内部的液态塑料,使夹持套向外膨胀,发生位移,一方面使夹持套向下移动,对目标物施加向下按压力;另一方面夹持套通过圆周位移,使圆柱形结构的夹持套的抓取端成逐渐收拢状,对目标物施加圆周方向的夹紧力。夹持套的2种力同时施加在目标物上,完成按压、夹持动作(见图2中虚线部分)。随后,机械手臂将目标物带向指定位置。此时,推杆向上运动,夹持套内部的液性塑料的膨胀力消失,夹持套松开目标物,工作结束。液性塑料弹性模量为E2=2.94×107Pa,通过膨胀产生有限的力,不会使夹持套产生过大变形。
3 控制系统设计
脑电波是一种使用电生理指标记录大脑活动的信号,可分为多个波段:δ波(1~3 Hz)、 θ波(4~7 Hz)、 α 波(8~13 Hz)、 β 波(14~30 Hz)、 γ 波(30~80 Hz)。在睡眠时,会出现一些波形比较特殊的脑电波,如驼峰波、σ波、λ波、μ波等[7];当人智力发育不成熟或处于极度劳累、麻醉状态时,会出现δ波;当人患有精神疾病时θ波极为显著;α波是正常人脑电波的基本节律,在没有外加的刺激时频率恒定,受到刺激时立刻消失;当人情绪激动时β波会出现;在人心情愉悦或静思冥想时,除α波外的其他波都被削弱,α波相对增强,在这种状态下人更容易产生灵感[8]。
3.1 控制系统组成
基于BCI的柔性体夹持机械手末端执行器控制系统如图3所示,是一个闭环反馈系统。信号处理使用NeuroSky公司的Think Gear芯片。将干态电极传感器贴在前额上,通过采集脑电波,过滤信号中的干扰因素并放大有效信号,使用eSense耳机算法,解读使用者的思维活动。该芯片可以处理并输出脑电波频谱、脑电波信号质量和eSense参数(专注度、放松度)。分析后的脑电波数据通过蓝牙模块发送到核心控制板,然后控制末端执行器的动作。机械手的运动状态通过人眼回馈给大脑,大脑继续发出相应指令,从而进行下一步动作的控制。
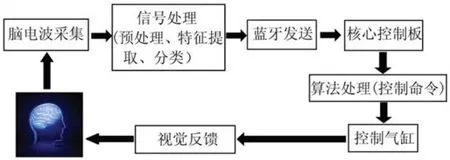
图3 控制系统组成
3.2 硬件设计
脑电波传感器的电极贴在前额,同时参考电极夹在耳垂上。传感器采集信号并进行预处理、特征提取及分类等操作。预处理过程包括滤波、线性模拟和信号的放大。使用HC-05嵌入式蓝牙串口通讯模块传递数据给核心控制板。控制板解析出相应的参数值,以0~200表示。设定一个阈值,该阈值可根据使用者实际状况进行调整设置。当参数值超过阈值后,控制板即发送PWM信号至电机驱动板,启动末端执行器。若参数值低于设定的阈值,指示灯闪烁,提示传感器接触不好,无法正常启动末端执行器。
核心控制板使用型号为ATmega328P-PU的AVR单片机,搭配自行设计的外围驱动电路、信号滤波电路。AT-mega328P-PU是一款使用方便的单片机,采用先进的RISC结构,具有32个8位通用工作寄存器。
脑电波传感器使用NeuroSky公司的TGAM生物传感器,能够进行眨眼侦测、测量原始脑波信号、处理和输出α,β等脑波波段数据、eSense专注度和放松度指数以及未来开发的其他数据。该传感器采样频率为512 Hz,采集脑电频率为3~100 Hz,输出波特率为57 600,使用UART(串口)标准输出接口通信,采用先进的噪音过滤技术,能减少日常生活中环境里的各种干扰,体积小,功耗低。

图4 核心控制板程序流程图
3.3 软件设计
核心控制板程序流程图如图4所示。接收数据后,判断数据包是否完整、信号是否有效以及强度是否达到阈值。若符合条件,由分析出的专注度与放松度共同控制机械手末端执行器。在高专注度低放松度时,末端执行器夹持并移动;在低专注度高放松度时,末端执行器是放松(非工作)状态。
4 结束语
本文基于脑-机接口技术设计了一种柔性体夹持机械手末端执行器,末端执行器外形为整体式,通过脑-机接口控制系统驱动气缸推杆上下移动,使夹持套内的液性塑料产生膨胀,帮助残障人士进行柔性体的抓取操作。
该系统首次将液性塑料应用于末端执行器进行柔性体的夹取,且对夹持物产生较小的压痕,具有结构新颖,柔性夹持和便于操作等特点。实际应用中会因干扰信号存在,影响末端执行器的反应灵敏度,故该系统需进一步优化。
猜你喜欢
发明与创新(2020年11期)2020-12-21
发明与创新·小学生(2020年3期)2020-04-13
合成纤维工业(2020年3期)2020-01-12
水利科技与经济(2019年8期)2019-09-05
电子制作(2019年23期)2019-02-23
创新作文(5-6年级)(2017年10期)2018-07-06
教育教学论坛(2017年34期)2017-08-30
中国科技纵横(2017年13期)2017-08-09
决策探索(2017年9期)2017-06-05
火控雷达技术(2016年2期)2016-02-06
