超高层微倾建筑中自适应全钢附着升降式脚手架的设计与施工
2020-09-25 07:35:28赵长江侯春明马靖华霍宗耀吴开毅
建筑施工 2020年5期
赵长江 侯春明 马靖华 霍宗耀 吴开毅 毋 敏
中建三局集团有限公司成都分公司 四川 成都 610041
1 工程概况
重庆来福士项目位于重庆两江交汇的朝天门,项目总占地面积90 000 m2,总建筑面积约1 100 000 m2,由3层地下室、6层裙楼、8栋超高层塔楼及连接4栋塔楼的3层空中连廊构成,是集商场、酒店、写字楼、高端住宅为一体的城市综合体项目,建成后将成为重庆市地标性建筑之一。
项目超高层塔楼为框架核心筒结构,南北两侧立面为弧形面,其中南侧为内凹形、北侧为外凸形,东西两侧为竖直平面,塔楼结构最大倾斜角度多达8°,如图1所示。楼层平面南北侧有弧形阳台,楼层结构板边缘不规则。为保证塔楼主体结构施工时周边架体严密封闭,同时保证施工进度,采用全钢附着升降式脚手架作为外防护架[1]。
2 微倾建筑附着升降式脚手架施工重、难点

图1 项目塔楼侧面
全钢附着升降式脚手架主要由滑道框架模块、脚手板模块、立杆模块、安全网模块、顶端小横杆、翻板模块、附着设备、升降设备、控制系统、防坠防倾附着装置、上下钢爬梯等组成。附着升降式脚手架构成如图2所示。
升降式脚手架附着装置为防坠防倾附着装置,并将提升拉杆等集成在内。附着装置前端通过带防坠块的导向座与滑道框架的防坠管连接,后端通过连接板与预埋螺栓连接,提升时通过电动葫芦悬挂在提升拉杆上进行。防坠防倾附着装置如图3所示。
常规的升降式脚手架附着机位固定、防护板块位置固定,无法适应塔楼外立面竖向微倾和不规则平面的造型需求[2]。若要将其应用于超高层微倾建筑中,则主要需要克 服以下重、难点:

图2 附着升降式脚手架构件示意

图3 防坠防倾附着装置
1)塔楼南北两侧立面为弧形面,南侧内凹,北侧外凸。升降式脚手架在爬升过程中需跟随立面造型形式进行角度调整,常规附着杆件无法适应不同长度的附着需求。
2)塔楼结构微倾,塔楼外框柱均为斜柱,且梁柱外侧不齐平,常规升降式脚手架附着机位长度固定,无法根据结构梁柱位置进行调整,在结构梁柱位置变化区域无法有效固定升降式脚手架。
3)塔楼东西两侧立面为平面,但是南北边缘呈现弧形,角部位置每层都在变化,常规升降式脚手架的板块无法适应弧形边缘造型,无法完全封堵角部缝隙。
4)为保证施工楼层外立面完全封闭,升降式脚手架设计防护范围为4.5层,总高约16 m。若升降式脚手架采用整体安装,则会影响对应区域的结构施工,从而影响工期。
针对以上重、难点,结合项目塔楼结构形式,对传统的附着升降式脚手架进行优化设计,采用可调节挑臂附着+标准附着体系、加长附着+标准附着、立面固定架+角部活动架、附着机位随结构调整、分段分节安装、斜向爬升等工艺,有效解决了上述设计与施工的重、难点,实现升降式脚手架斜向爬升,保证塔楼结构周围防护严密。
3 自适应全钢附着升降式脚手架优化设计
3.1 附着体系优化设计
3.1.1 可调节挑臂附着+标准附着体系
塔楼结构南北侧呈弧形面,不同楼层板边缘不同,升降式脚手架附着构件在不同楼层的附着长度不同,且每次提升后需根据新楼层的板边缘进行调整。为此,针对性地设计出一种可调节挑臂附着(图4),挑臂附着由挑臂导轨、可调加长件、固定螺杆等部分组成。

图4 可调节挑臂附着示意
挑臂导轨可通过固定螺杆在结构的埋设位置进行位置调节,但是由于水平弧形阳台挑板结构长度不一致,故仅依靠调节挑臂导轨无法满足调节距离精度要求。通过可调加长件辅助调节,加长件内部的连接螺杆可通过调节齿轮进行调节,从而调节长度,加长件可调节最大距离为300 mm。可调节加长件如图5所示。
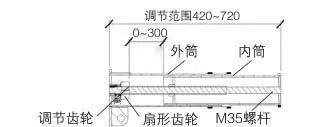
图5 可调节加长件示意
挑臂附着构件通过挑臂导轨固定在结构上,可调加长件外筒连接板与防坠防倾附着构件连接,加长件内筒与挑臂导轨连接。可调附着体系连接如图6所示。

图6 可调节挑臂+标准附着实景
3.1.2 加长附着+标准附着体系
塔楼结构东西立面为水平面,其结构外框柱呈倾斜布置,且凸出结构梁,梁柱结构外侧边缘不齐平,根据结构柱外凸尺寸定制加长附着件,用长250 mm的加长附着件补充结构梁和标准附着件之间的空隙,如图7所示。

图7 加长附着+标准附着示意
安装过程中,在结构梁的位置先安装加长附着件,再将标准附着件与加长件通过螺栓连接固定,安装实景如图8所示。
3.2 角部防护体系优化设计
本工程塔楼为弧形造型,角部位置的结构造型每层都不一致,且向上爬升时南北侧斜向架体与东西侧竖直架体产生冲突。针对此问题,对升降式脚手架外侧钢质安全网进行改造设计,将角部的常规方形固定防护架改为活动的三角形防护架与梯形防护架。
角部活动架直角边与东西侧竖向固定架连接固定,斜边与南北侧斜向架体连接,活动防护架根据东西立面的竖向固定架与南北侧斜向架体之间的缝隙进行选择拼装,通常为将下方板块依次向上方安装即可。角部活动架安装如图9所示。

图8 加长附着+标准附着安装实景

图9 角部异形架安装实景
3.3 安装方式优化设计
本项目采用的升降式脚手架防护高度为4层半,在塔楼主体结构施工至第6层左右进行安装,且安装区域需要拆除外架。为减少安装升降式脚手架对主体结构施工进度的影响,同时减少外架拆除区域和安全隐患,对升降式脚手架板块进行优化。
为减少安装时外架拆除区域,将升降式脚手架上下分为2节安装,立面下节安装高度10.2 m,上节安装高度6.0 m。安装时先安装下节架体,高度约2层半,仅需要拆除2层外架即可,主体结构施工至上方楼层后,再安装上节架体,与下节架体组合构成整体升降式脚手架。
塔楼结构楼层施工不同步,单层结构分为南北两部分施工,故将升降式脚手架东西立面架体在施工缝位置进行分块,塔楼四周升降式脚手架整体分为南北两部分。两部分分别在对应的施工楼层进行安装,且可相对独立地进行安拆及爬升。
4 自适应全钢附着升降式脚手架施工
4.1 附着升降式脚手架施工部署
自适应全钢附着升降式脚手架针对项目塔楼结构特点进行优化设计之后,根据设计图纸进行加工生产,架体各部分构配件进场时进行全面质量验收。
附着升降式脚手架安装前结合项目塔楼情况进行平面布置,在塔楼南北侧设置可调挑臂附着,挑臂附着依次编号,便于调节。在塔楼东西立面结构柱位置设置标准附着件,东西立面结构梁位置增设加长附着件。东西立面的架体在中间进行分段,且在4个角部均设置活动架,对角部架依次编号。卸料平台的位置根据需要在架体下半节开设预留孔洞,在东西两侧各留设3个卸料平台。塔楼升降式脚手架平面布置如图10所示。
4.2 附着升降式脚手架安装施工工艺
升降式脚手架的附着件埋件在主体结构施工时即在结构梁柱上完成预埋,然后将附着件与预埋件对应安装。
架体组装分节进行,先组装下节再组装上节。架体在地面组装完成,组装顺序为:在地面摆放所需机位滑道、内排立杆→安装底部脚手板和机位托盘→安装其他脚手板→安装外排立杆→安装机位吊点、斜撑→安装腰杆→安装安全网架。

图10 附着升降式脚手架平面布置
架体分节组装完成后采用塔吊进行吊装,将吊钩挂在待安装架体单元立杆上部孔内的四处U形螺栓吊环内,并保证起吊后下节架体单元垂直。
整体吊装顺序从转角处开始,依次吊装。起吊后校正架体单元横纵方向的角度,校正好安装位置后立即安装架体下部2个附墙固定附着支座,且在每个附墙固定附着支座上平面处导轨上安装好2个定位承载扣件,下节架体安装时需设置预埋临时拉结架体,防止倾覆。第2组吊装时与第1组用螺栓连接内外排架体,补齐外排安全网、立杆等。
架体吊装后完成断片处立面安全网封闭、横向脚手板搭接。在与楼板处于同一平面时将活动钢质翻板打开,用以封闭架体与楼板之间的缝隙。南北侧的架体翻板采用定制的加长板,从而保证各楼层不同宽度的缝隙均能够封堵严密。
4.3 提升电控系统安装工艺
为保证架体提升的同步性,在每个机位配备一套升降和同步控制系统。由于电动葫芦安装在架体平台第2层脚手板下部,并配置力传感器,故在提升时,操作人员可安全地对架体的电控同步提升系统进行操作。待架体提升完毕后关闭电控提升系统,并将架体导轨附着点与附着体系紧固,完成提升过程。
电控系统使用电压为三相380 V,电控系统还设置了漏电保护装置,确保使用过程中的用电安全。
升降设备由环链电动葫芦和传感器、PLC电控系统等组成。机位荷载与该机位的基准荷载偏差大于设定值15%时,系统向电气执行元件发出启停指令,从而使得整个升降式脚手架荷载基本平衡一致;当机位荷载与该机位的基准荷载偏差大于设定值30%时,系统向电气执行元件发出停止指令,使该机位所在的整片架体停机,可有效保证架体提升过程安全。
4.4 附着升降式脚手架爬升工艺
4.4.1 斜向爬升工艺流程
塔楼不同楼层的阳台外伸结构长度不同,为满足升降式脚手架在塔楼弧形立面爬升的可操作性,通过调节南北侧挑臂附着的伸缩长度,控制南北侧架体的不同倾斜角度。架体倾斜角度调整完成后,通过架体底部的电动葫芦提升。
架体防护高度为4层半,在各层结构楼层外侧边缘安装附着件,附着件由下向上依次编号为Ⅰ、Ⅱ、Ⅲ、Ⅳ(分别对应提升后的楼层位置)。标准附着件上均设置有卸力吊点,卸力吊点由预埋在梁柱里的螺杆和环卡组成,并通过防坠钢丝绳与底部导向座连接,保证提升过程中架体的安全。
架体爬升时,东西立面的竖向固定架爬升流程与常规升降式脚手架爬升流程一致,只是角部可调活动架需要跟随楼层结构变化逐层进行拆装。南北侧爬升流程如下:加固附着件Ⅲ→适当松开附着件Ⅰ、Ⅱ,利用调节装置内拉附着件Ⅱ使其贴紧建筑主体,然后加固附着件Ⅱ→调节附着件Ⅲ,适当松开附着件Ⅲ,利用调节装置内拉附着件Ⅲ使其贴紧建筑主体,然后加固附着件Ⅲ→安装附着件Ⅳ,固定附着件Ⅳ,卸力拉紧→固定附着件Ⅰ,卸力拉紧。
爬升流程如图11所示。

图11 倾斜侧爬升示意
塔楼南北侧为弧形,下半部分向北倾斜,上半部分向南倾斜,南北侧的架体爬升时存在倾斜拐点。拐点位置通过调节可调挑臂附着的长度保证每道附着位置附着牢固,然后在架体与结构缝隙较大的位置采用加长钢质翻板封闭,南侧拐点位置主要封闭中间2道附着,北侧拐点位置主要封闭上下2道附着。
4.4.2 避难层爬升工艺
项目塔楼设置有避难层,避难层层高达6.9 m。在初次进入避难层且首次提升3.5 m后,等待上一层的支模系统及模板卸料完成,再继续第2次提升1层,进入避难层施工期(开始支模)。
此时架体悬臂过高,需预埋拉结处理;除首次进入避难层时须连续提升2次外,以后各层均提升1次,同时须在架体底部楼层先拆模后再提升架体。
4.4.3 架体爬升注意事项
1)提升前应先检查吊点、吊环、吊索情况,防坠落附墙支座的情况及密封板的情况等,并对使用工具、架子配件进行自检。
2)附着支承处墙体结构的混凝土强度必须达到或超过20 MPa要求后,才可提升。
3)提升时,附着升降式脚手架分区、分组提升,当提升过程中无安装导向座工序和未发生故障报警时,可一次提升到位。当有故障报警时,则应及时排除故障后再重新提升。
4)提升到位停机后,安装好定位防滑扣件,定位扣件上下翻转使用,以保证扣件与防坠管紧密贴合。定位扣件全数固定上紧后,便可进行卸荷载摘吊钩工作。
5)提升到位后,对升降式脚手架进行全面检查,确保四周防护严密、所有固定点位安全可靠、临电设备符合要求,并形成书面的检查记录,确保安全后,方可继续投入使用[3-4]。
4.5 附着升降式脚手架拆除施工工艺
在拟拆架体区域下方地面划出安全区域,安排专人警戒守护,严禁与拆架无关的人员进入该区域。
预先在拆除的单元立杆上绑2根缆风绳,用于起吊过程中稳定单元,防止摆动。
先拆除电气和升降设备放置在楼层内,脚手架应按架体分组区段从上至下拆除,不得上下同时施工。架体利用塔吊拆除吊装时,整个架体上及周边严禁任何人员作业。
5 结语
本文通过可调节挑臂附着、加长附着、角部活动架、上下分节安装等技术,有效解决了异形结构附着升降式脚手架的安装、附着和提升问题。通过在重庆来福士广场项目超高层微倾塔楼施工中实际应用,有效减少全钢附着升降式脚手架的安拆时间,且能有效满足防护楼层的封闭要求、适应斜向爬升需要。该技术具有设备生产定型化、施工标准化、操作安全化等优点,实施效果良好,具有较高的推广应用价值。
猜你喜欢
佛山陶瓷(2022年8期)2022-11-23 20:33:39
计算机仿真(2021年9期)2021-11-17 12:36:18
科技尚品(2021年7期)2021-09-12 14:51:22
建筑施工(2021年3期)2021-08-06 02:21:50
煤炭科学技术(2021年3期)2021-05-14 03:56:36
卷宗(2020年6期)2020-04-23 09:37:59
通信产业报(2018年21期)2018-08-20 10:25:54
山东医药(2015年13期)2016-01-12 00:39:34
烟台果树(2015年3期)2015-12-10 07:46:55
上海金属(2015年6期)2015-11-29 01:09:05