桥梁转体过程及姿态调整中测量控制要点
2020-09-22 08:11范金泉
价值工程 2020年26期
关键词:测量
范金泉

摘要:随着我国经济的发展和科学技术的进步,近两年转体桥梁在跨越峡谷、河流、铁路、高速公路上具有明显的优势,得到了迅速的应用和发展。现结合大河路上跨郑焦城际、京广铁路立交工程实例,就桥梁转体过程及姿态调整中的测量方法及测量控制要点简要分析,以方便桥梁转体过程中测量监控,精确掌握桥梁转体过程中的转体角度,提高转体桥线形控制质量,确保梁体转体就位后线形美观,符合设计要求。
关键词:测量;桥梁转体;姿态调整
Abstract: With the development of China's economy and the progress of science and technology, in the past two years, rotating bridges have obvious advantages in crossing canyons, rivers, railways and expressways, and have been rapidly applied and developed. Combining with the examples of the Zhengzhou-Jiaozuo Intercity Railway and Beijing-Guangzhou railway overpass projects on Dahe Road, a brief analysis of the measurement methods and measurement control points in the bridge rotation process and attitude adjustment is made to facilitate the measurement and monitoring of the bridge rotation process and accurately grasp the bridge rotation angle, improve the linear control quality of the turning bridge and ensure that the beam body is beautifully shaped after turning in place and meets the design requirements.
1 工程概况
大河路上跨郑焦城际、京广铁路立交工程位于大河路与铁路交叉口北侧200m附近,起点桩号(PM1墩)为K3+102.552,终点桩号(PM4墩)为K3+419.552,转体主墩(PM2墩)桩号K3+187.552,转体主墩(PM3墩)桩号K3+334.552,与郑焦城际交叉处铁路里程为K9+553.7,与京广铁路交叉处中心里程为K658+655.587。桥梁结构形式为三跨85m+147m+85m全预应力混凝土连续刚构。单侧转体T构长度143.5m(71.75m+71.75m),PM2墩T构逆时针转体62.1°,PM3墩T构逆时针转体62.9°。桥梁单侧T构转体吨位3万吨,总转体吨位6万吨。
2 桥梁转体过程测量控制
桥梁转体过程分试转体和正式转体。转体测量控制采用实时采集转体梁悬臂端监测点坐标,根据采集的监测点坐标精确计算桥梁转体角度、角速度、悬臂端旋转弧长、悬臂端线速度等数值。桥梁转体时操控台根据计算的数值控制桥梁转体速度及转体角度。
2.1 测量监控方法
2.1.1 监测点埋设
监测点埋设于转体梁悬臂端中部,监测点埋设牢固后将全站仪棱镜架设在监测点上,必须保证棱镜在转体过程中竖直稳固不倾斜。
2.1.2 监测点坐标采集
转体前在地面适当位置架设自动跟踪全站仪,转体时采集监测点实时坐标。
2.1.3 转体测量数据计算
主要计算数据:计算转体过程中转体梁已转体角度、待转体角度、悬臂端已旋转弧长、悬臂端待旋转弧长、转体角速度、悬臂端线速度等参数。计算方法可采用CAD画图法、EXCEL表格法、软件计算法。現一一介绍分析如下:
①CAD画图法:CAD画图法是将转体梁转体前及转体就位时的平面位置按坐标画在CAD图上,同时将转体前监测起点、转体就位时监测终点及转体中心点画在CAD图上。转体时将采集的监测点坐标实时绘制在CAD图上,根据监测点实时位置在CAD图上标注出转体梁已旋转角度、待旋转角度、悬臂端已旋转弧长、悬臂端待旋转弧长等转体参数。此方法直观,简单,一目了然,缺点是速度比较慢。以铁路西侧PM2#转体梁转体过程中(监测点1、监测点2)画图标注转体参数如图2。
②EXCEL表格法:EXCEL表格法将已知参数:监测起点坐标、监测终点坐标、转体中心点坐标及转体梁悬臂端至转体中心点的距离等已知数据输入EXCEL中。根据已知数据参数,EXCEL表格自动计算待求参数。需要事先在ECXEL表格中编辑好待求参数的计算公式。在桥梁正式转体时将采集的监测点实时坐标输入EXCEL中,根据已编好的计算公式,EXCEL表格中待求参数单元格可立即自动显示计算所有待求参数的结果。此法准确、简单、容易掌握,计算速度快,减少人为计算错误,缺点是不直观。
以铁路西侧PM2#转体梁转体参数计算为例,待求参数单元格计算公式如表1-表3。
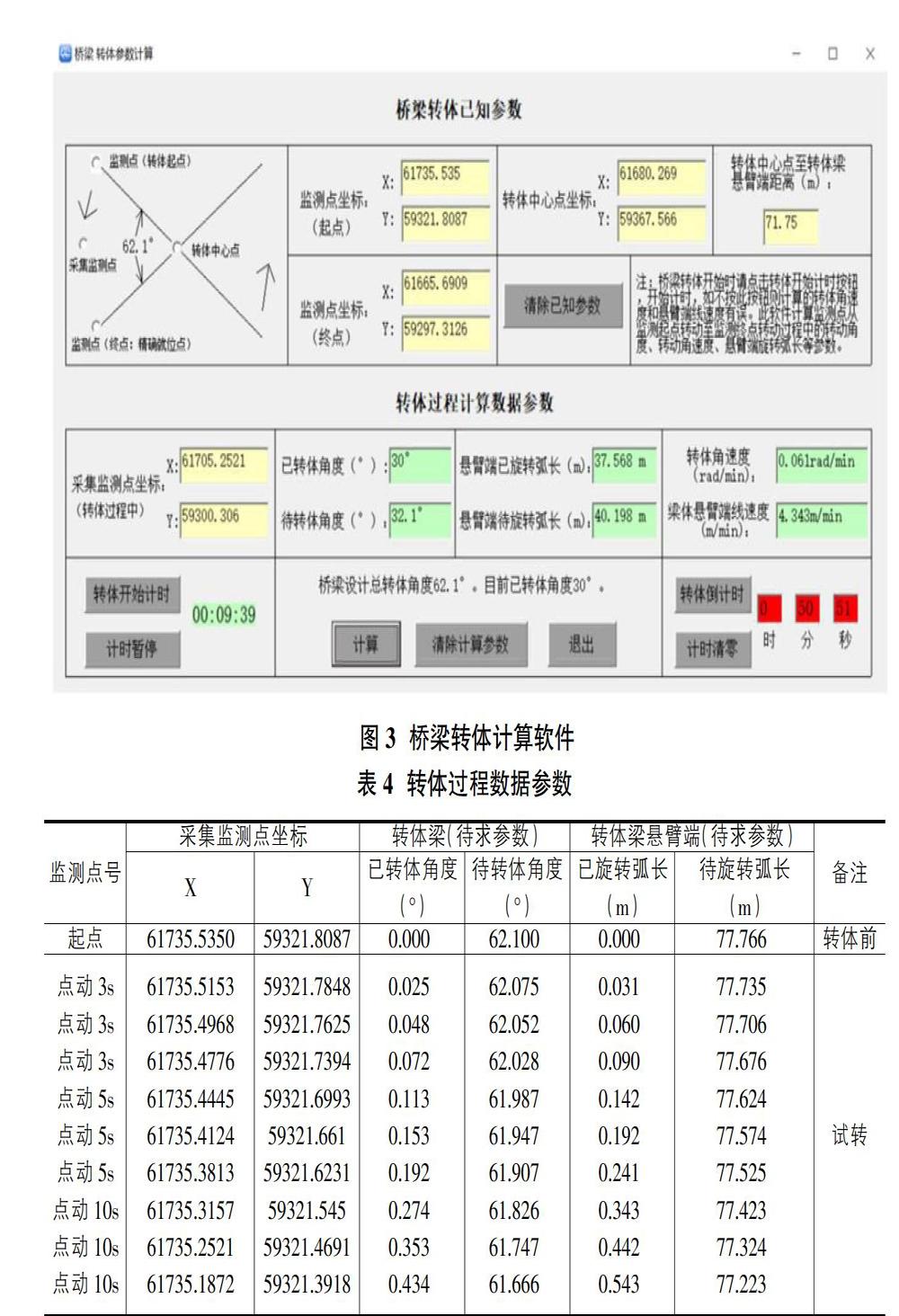
③软件法:通过visual basic编程软件,编写《桥梁转体计算软件》。利用《桥梁转体计算软件》计算转体过程中转体角度、转体角速度、转体梁悬臂端旋转弧长、转体梁悬臂端线速度、等桥梁转体数据参数。操作界面简单,明了,计算速度快,不用编写公式。以铁路西侧PM2#转体桥为例《桥梁转体计算软件》界面如图3。
2.2 试转体测量控制
试转目的是为了采集各项数据参数,为桥梁正式转体提供数据支持。
2.2.1 试转过程主要采集的数据有:
①每分钟转速:监测每分钟转体角度及悬臂端旋转弧长,检验是否满足转体时间要求。
②采集点动数据:采集千斤顶点动牵引3s、5s、10s时桥梁转体角度及悬臂端旋转弧长,以上点动时间各采集3次,分析点动时间与桥梁转体角度和梁体悬臂端旋转弧长之间的关系,指导正式转体。
③惯性位移值:停止牵引后梁体惯性移动数据。
④启动时油压:实际启动时千斤顶牵引力值。
⑤转动时油压:实际持续转动时,千斤顶牵引力值。
2.2.2 试转采集数据分析:以铁路西侧PM2#转体梁为例试转数据分析如下:
①转体试转5°,测得转体角速度为:0.015rad/min。悬臂端线速度1.076m/min。正式转体剩余角度57.1°,推测正式转体用时67min。正式转体要点时间120min,满足转体时间要求。
②试转时点动数据如表4。根据点动数据分析可得:点动秒数与桥梁转体角度和悬臂端旋转弧长成正比。桥梁点动1秒平均转体角度0.008°,悬臂端平均旋转弧长10mm。
③惯性位移值:由于转体吨位较大,转体缓慢,惯性位移值几乎为0,可忽略不计。
④启动时启动力:实测启动牵引力2200kN<3094.7kN(设计)。
⑤转体时转动牵引力:实测转体牵引力1700kN<6000kN(千斤顶设计张拉力),满足转体要求。
通过试转参数数据分析,满足正式转体要求。
2.3 正式转体测量控制
正式转体前测量监测点坐标,作为监测起点坐标。转体过程中实时采集监测点坐标,计算转体数据,当转体结构接近设计位置即计算的悬臂端待旋转弧长为0.5m时(此时待转体角度为0.399°),转体改为点动操作,根据试转时分析的点动秒数与转体角度和悬臂端旋转弧长之间的关系,在牵引控制台上输入相应的点动秒数,每输入数据操作一次,测量人员测报监测点数据一次,反复循环,直至转体梁精确就位。
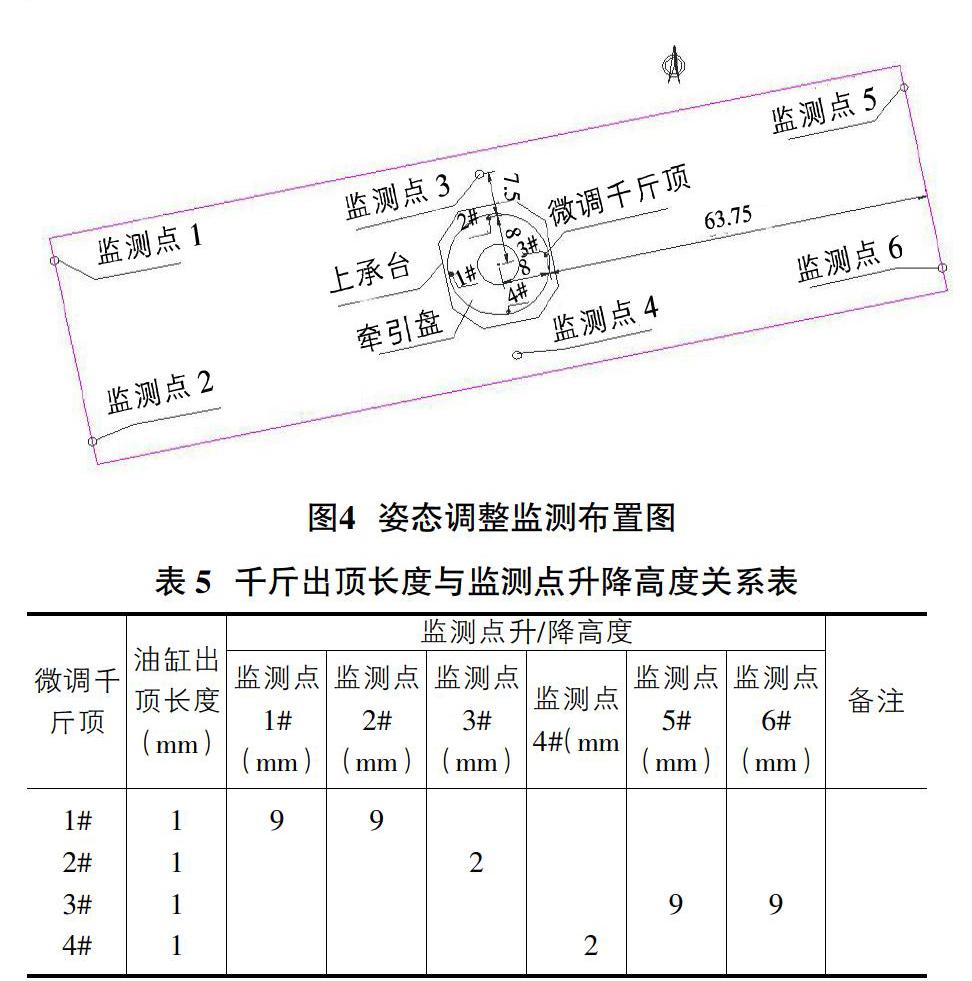
通过布置在牵引盘下的微调千斤顶调整桥梁线形姿态直至符合设计要求。铁路西侧PM2#转体梁姿态调整布置如图4。
微调千斤顶布置在牵引盘下,距离转体中心点8m,对称桥梁轴线共布置4台。监测点共设置6个(见图4)。用水准仪抄平监测点标高,与设计标高对比,计算差值。
根据计算的差值和千斤顶出顶长度与监测点升降高度之间的关系计算油缸出顶长度。反复調整直至桥梁线形符合设计要求。(表5)
3 测量控制注意事项
测量仪器在使用前必须检查,精度符合要求。控制点埋设必须牢固可靠。测量计算图、表、软件转体前必须模拟熟练掌握。
4 结束语
转体桥梁测量控制对转体桥在要点规定时间内按时精确转体就位,避免过转,保证桥梁线形美观,符合设计要求,起到关键性作用。正确的测量方法选择和测量控制对桥梁转体精确性起到了关键作用。通过对大河路上跨郑焦城际、京广铁路立交工程桥梁转体测量控制,对桥梁转体测量监控积累了施工经验,对转体桥测量控制具有一定的借鉴作用。
参考文献:
[1]周水兴,何兆益,雏毅松,等编著.路桥施工计算手册[M].2001.
[2]DG/TJ08-2220-2016 J13652-2016,桥梁水平转体施工技术规程[S].
[3]GB50026-2007,工程测量规范[S].
猜你喜欢
小学科学(学生版)(2021年5期)2021-07-22
科学大众(2021年9期)2021-07-16
数学小灵通(1-2年级)(2017年10期)2017-11-08
军事文摘·科学少年(2017年4期)2017-06-20
军事文摘·科学少年(2017年2期)2017-04-26
少儿科学周刊·儿童版(2016年1期)2016-03-14
少儿科学周刊·儿童版(2016年1期)2016-03-14