空间平台电动力绳系离轨装置技术研究
2020-09-16 02:49王小锭张烽申麟文浩谢侃唐琼
空间碎片研究 2020年2期
王小锭,张烽,申麟,文浩,谢侃,唐琼
(1.中国运载火箭技术研究院研究发展部,北京100076;2.南京航空航天大学机械结构力学及控制国家重点实验室,南京210016;3.北京理工大学宇航学院,北京100081)
1 引言
由于人类太空活动日益频繁,不可避免会在宇宙中遗留大量空间碎片,如废弃卫星、火箭末级等,这些高速飞行的空间碎片是对未来人类空间活动的极大威胁[1,2]。截至2019年初,美国空间监测网编目的空间物体数目超过2.3万个,对外公开编目的空间碎片数量超过1.8万个[3]。随着巨型卫星星座等推出和大量火箭发射,空间碎片减缓更加迫在眉睫。
对于已经存在的空间碎片,若仅通过轨道的自然衰减离轨,通常耗时极长。目前,空间碎片的清除方式主要有推力离轨方法、空间机器人抓捕主动离轨方法等,但是此类方法都存在耗能大、成本高的缺点。因此迫切需要开发低成本、低推进剂消耗、高效的碎片离轨清除技术。此外,根据国际上空间碎片减缓技术与政策的发展形势预判,未来所有发射入轨的火箭、卫星都可能被要求具备清理自身碎片的能力,在完成任务后实现主动快速离轨,用以源头上消除空间碎片的产生。利用电动力绳系实现空间平台离轨,离轨过程中不需要消耗其所携带的推进剂,一定程度上,可降低离轨成本,提高离轨效率。
本文较为系统地介绍了电动力绳系离轨技术原理及国内外发展情况,并在此基础上,分析了空间平台电动力绳系典型的离轨任务及适应性情况,随后设计了空间平台电动力绳系离轨装置,系统介绍了该装置的系统方案与组成,重点阐述了若干关键技术突破情况。
2 电动力绳系离轨技术原理及国内外发展情况
2.1 电动力绳系离轨技术原理
电动力绳系是利用导电系绳切割地磁场而产生电荷效应,其中系绳端部安装有等离子体接触器,当系绳与地球的磁层和电离层相互作用时,由于等离子体接触器与电离层之间存在电荷交换,绳系与电离层形成了一个闭合回路,因而在导电绳系中产生了电流。电流回路在磁场中受到洛伦兹力作用,该力正比于磁场强度、电流大小及系绳的长度,电磁力方向与飞行器速度方向相反,绳系利用这个力实现空间目标的离轨。利用电动力绳系实现空间碎片离轨,离轨过程中不需要消耗所携带的推进剂,这将极有效地降低离轨成本,提高离轨效率[4—6],如图1所示。
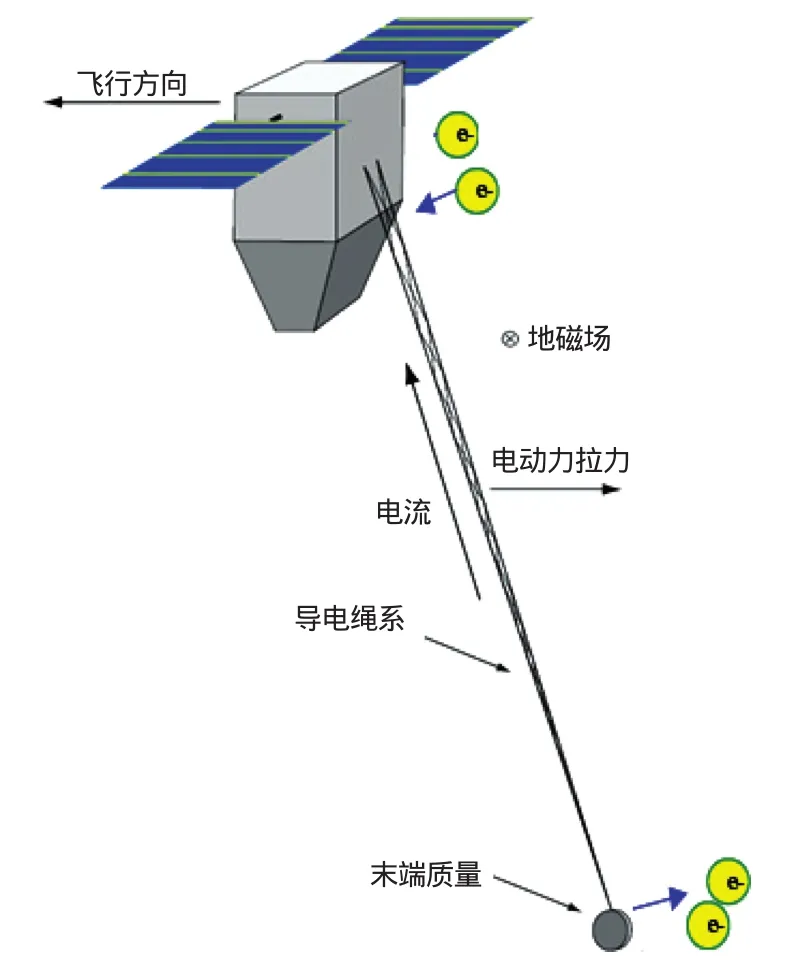
图1 电动力绳系离轨原理示意图Fig.1 Schametic diagram of EDT de-orbiting principle
2.2 国内外发展情况
电动力绳系技术在废弃卫星及火箭末级残骸清理、航天器轨道转移、空间电磁场科学试验等领域具有巨大的潜在应用价值,一直是国外航天研究的热点。美国、加拿大、欧洲和日本开展了大量电动力绳系方面的研究与实验,自1966年美国在第九次载人飞行试验中通过双子星11号进行绳系卫星成功释放以来,美国、欧洲、日本等航天大国已对绳系航天器做了多次在轨试验飞行。
1992年7月31日,美国通过 “亚特兰蒂斯号” (Atlantis)航天飞机释放了一颗意大利研制的电动力绳系卫星TSS-1。1993年6月26日,美国国家航空航天局 (NASA)约翰逊航天飞行中心进行了一项短期的空间等离子发电机试验(PMG)[7]。NASA于2003年开展了 ProSEDS任务[8],该计划由于2003年2月 “哥伦比亚号”(Columbia)航天飞机灾难而被迫取消。美国TUI系绳公司开发出一种能让报废卫星快速脱离近地轨道的新方法—— “终结绳索”[9]。
欧盟积极推进和开展该技术在空间碎片清理的应用研究,从2010年开始资助了 “BETs”电动绳系项目。
日本在2010年8月通过探空火箭开展了电动力 “裸系绳”展开试验,并对快速启动空腔阴极离子接触器技术作了验证[10]。2016年12月13日,日本计划在太空释放系绳以对该电动力绳系技术进行在轨测试,此次在轨演示任务被称为“鹳号集成系绳试验”(KITE)[11]。但是,进行清理空间碎片试验的日本货运飞船 “鹳”6号机未能完成绳系释放,试验宣告失败。
与国外相比,我国尚未开展飞行演示验证,也未有公布的计划,总体而言与国外研究还有较大的差距,但是,国内主要航天研究机构和高校在电动力绳系的理论研究和系统性应用研究一直在做有益的探索。
中国航天运载技术研究院结合在役典型火箭,开展了基于电动力绳的火箭末级离轨技术概念研究,对基于电动力绳的火箭末级离轨任务进行了仿真,系统性地论证了电动力绳系在火箭末级离轨应用的可行性,并对电动力绳系的部分关键技术,如动力学控制技术、高效空间电荷交换技术等开展了攻关研究[12]。南京航空航天大学、哈尔滨工业大学、北京理工大学等高校在电动力绳系控制方法、离轨仿真、空间电荷交换装置等方面开展了一些研究[13—16]。
3 空间平台电动力绳系典型离轨任务及装置方案设计
3.1 电动力绳系离轨典型任务设计
空间平台电动力绳系离轨装置为低轨道 (轨道高度低于2000km)运载火箭末级、卫星提供轻质、低成本、高可靠任务后离轨服务。离轨装置设计分为两类,一类服务于火箭末级及较大卫星平台,另一类产品服务于微小卫星平台,覆盖中低轨主要航天器。
以太阳同步轨道 (SSO)某典型运载火箭末级 (轨道倾角为98°、质量为4t、级长为11.3m、直径为3.35m)为离轨对象开展典型任务设计,通过电动力绳离轨使其轨道高度由700 km降轨至200 km。通过研究表明,在自然衰减状态下该型运载火箭末级很难满足25年衰减的国际要求,若采用直接制动离轨方式,需要末级提供的速度增量及燃料消耗如表1所示[12]。

表1 某典型运载火箭末级直接离轨能力需求分析Table 1 Capability requirements for direct de-orbiting of terminal stage of a typical launch vehicle
考虑到火箭末级离轨系统要做到系统尽量简单,以避免设计的复杂度和系统开销代价。因此,在满足总体任务指标要求的情况下,控制策略采用简单易行的方式。
基于电动力绳系离轨的运载火箭全飞行段任务剖面主要包括运载火箭发射任务段以及电动力绳离轨任务段,根据任务流程,主要的任务剖面分段如下,如图2所示。
(1)运载火箭发射段。在该阶段,电动力绳系离轨装置安装于运载火箭末级上,不执行试验操作,飞行剖面取决于运载火箭任务。
(2)运载火箭末级与有效载荷分离。运载火箭末级与所有有效载荷分离完成后,开始准备执行电动力绳离轨任务。
(3)电动力绳释放阶段。释放电动力绳系阶段,该阶段是任务关键阶段,绳系释放成功与否是决定任务成败的关键因素。
(4)绳系稳定与离轨阶段。绳系释放完成后,即进入绳系稳定控制与离轨阶段,直至完成离轨,任务结束。
3.2 系统组成及工作原理
应用于运载火箭末级的电动力绳离轨装置由火箭末级离轨模块、电动力绳系组成,电动力绳系包括释放展开装置、导电绳系、绳系控制单元、等离子接触器等部分,其等离子接触器采用空心阴极方案[12],如图3所示。
导电绳系采用裸系绳,其包括非导电部分、裸露的导电部分以及绝缘的导电部分。裸露的导电部分从空间等离子体收集电子,结构设计采用Hoytether方案[17],保证任务过程存活率达到95% ~98%。
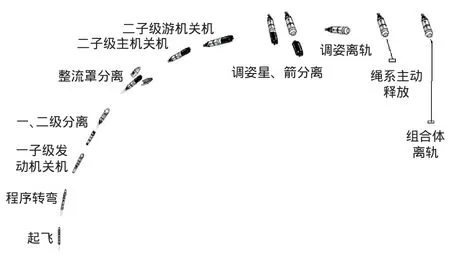
图2 电动力绳系离轨全飞行段任务剖面示意图Fig.2 Mission profile of EDT de-orbiting during whole flight

图3 电动力绳离轨装置系统组成Fig.3 Composition of EDT de-orbiting system

图4 电动力绳离轨装置系统工作原理Fig.4 Work principle of EDT de-orbiting system
释放展开装置主要包括存储系统、弹射系统以及制动系统。对于圆柱状绳系,存储系统采用卷轴式存放装置,而对于带状绳系,采用矩形箱式存放装置。弹射系统上考虑采用弹簧进行弹射;制动系统考虑在绳系末端包裹摩擦材料达到减速目的。
等离子接触器采用空心阴极方案,空心阴极系统主要由气路模块、控制模块和电源模块等组成。气路模块提供必要的放电工质,控制模块控制气路的开关并完成相关数据测量,并维持等离子体接触器点火功能,如图4所示。
4 空间平台电动力绳系离轨装置关键技术研究进展
4.1 电动力绳系离轨任务分析与仿真技术
4.1.1 任务分析
电动力绳系离轨系统处于一个复杂的耦合场状态,多因素制约离轨性能,需要综合考虑引力场、大气阻力、电磁场因素开展任务规划。这里从任务总体设计层面,基于数值仿真,开展任务适应性分析,以指导工程设计。
首先,基于非奇异轨道坐标形式,描述系统动力学如下[18,19]:

式中,p,ξ,η,h,k,L为非奇异形式的轨道要素,与传统轨道六要素 (轨道半长轴a,轨道偏心率e,轨道倾角i,轨道升交点赤经Ω,近地点幅角ω和真近点角v)能够构成一一对应。S,T,W分别是沿轨道坐标系三方向的摄动加速度分量,综合考虑了大气阻力、地球扁率以及电动力的影响,具体形式参见文献 [18]和文献 [19]。
随后,开展两种绳系方案 (裸系绳和绝缘系绳)下不同任务参数对应的离轨性能分析。其中,需要说明的是,裸系绳方案中绳系电流强度依赖于空间的粒子浓度,而绝缘系绳方案中绳系电流强度对空间环境粒子浓度依赖性较弱,一定程度上可实现预设恒定电流值,因此在本文研究中,绝缘系绳方案中设定电流为i=0.5A。设置末端载荷质量为40kg,系绳长度为5km,则两种方案下,不同初始轨道倾角及初始轨道高度对应的系统离轨时间如表2所示,图5给出了不同绳系类型下的离轨时间等高线图,并得到如下任务分析结论[18]:
(1)若离轨任务初始轨道高度在500km以下,尤其是非极轨道,采用裸系绳与采用绝缘系绳,其离轨性能相差无几。但考虑到系统实现层面,裸系绳更占优势,因其无需配置装置以收集电荷,电荷交换效率较高。
(2)若离轨任务初始轨道高度在500km以上且1000km以下,随着轨道高度的增高,电子浓度变得稀薄,裸系绳方案的离轨性能会受到大幅影响,这种情况应选用绝缘系绳,而且一般任务耗时不超过2年。
(3)若离轨任务发生于极轨道附近,由于地磁场与轨道面法线近乎垂直,大大影响电磁效应,产生的洛伦兹力也非常小,因而大幅影响电动力绳离轨性能。
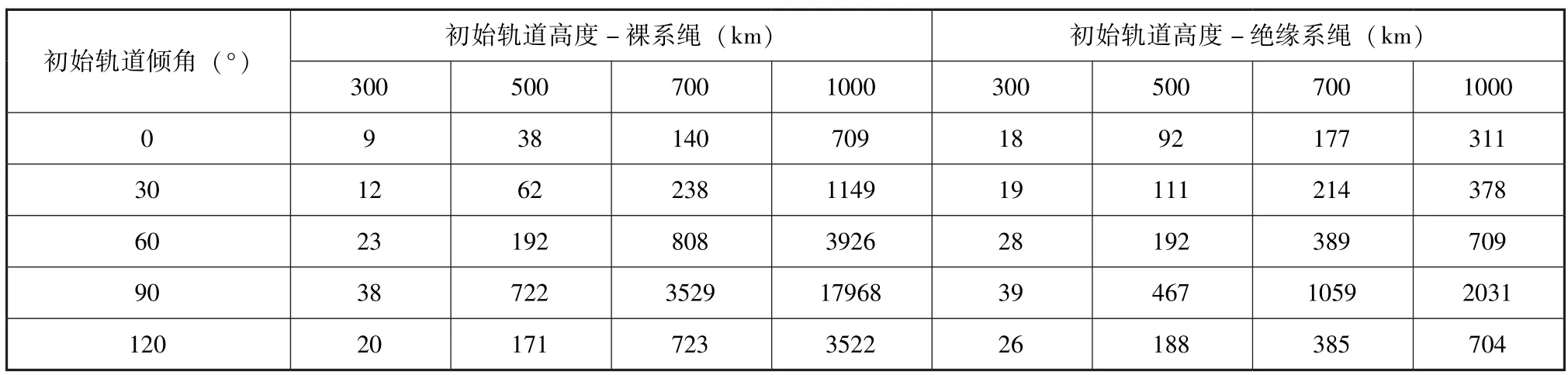
表2 不同任务参数下的系统离轨时间[18] (时间:天)Table 2 De-orbiting time of the system with different mission parameters
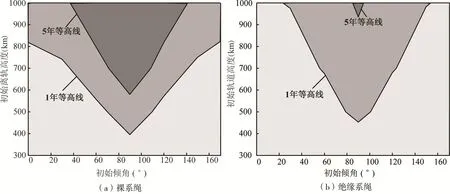
图5 两种绳系下的离轨性能等高线分布图Fig.5 Contour distribution of de-orbiting performance of two kinds of tethers
4.1.2 仿真系统搭建
为便于快速开展总体任务分析,基于Matlab软件搭建了电动力绳系离轨仿真系统,系统包括参数模型数据库,电动力计算模块、绳系姿态控制模块、绳系与火箭末级耦合动力学模块、离轨轨道计算模块和离轨过程图形化演示模块。
通过设置不同的初始参数,能够以可视化的形式验证控制方案的有效性,便于通过数据交互式仿真快速开展任务可行性分析,仿真界面如图6所示。
4.2 动力学与控制设计与试验技术
4.2.1 动力学与控制方案研究
基于电动力绳的火箭末级离轨任务主要分为绳系弹射释放和电动力离轨两个阶段。
针对绳系弹射释放过程中,由于柔性性质,绳系构型将产生较大变化,利用 “珠式”模型更为完整的刻画其动力学行为。如图7所示,将绳分为n个集中质量点,并记节点0为火箭末级,节点n+1为载荷,其它节点1,2,…,n。
根据牛顿定律,火箭末级或载荷的动力学可由下式描述:
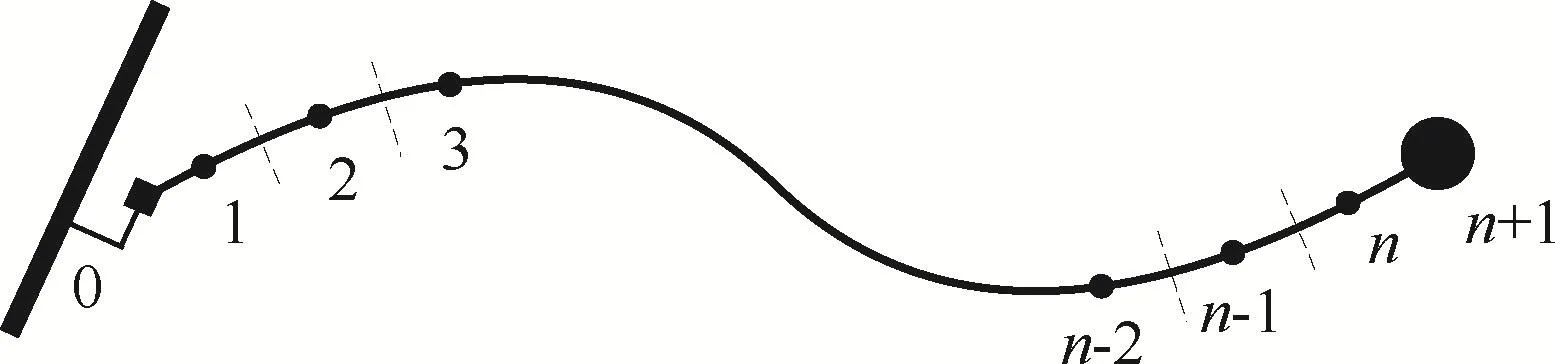
图7 绳系珠式模型示意Fig.7 Schematic diagram of tethered bead model

除火箭末级或载荷的其它节点动力学可由下式描述:

式中,Ti=Ti,i-1+Ti,i+1,Ti,i-1和Ti,i+1分别表示节点i的前置节点i-1和后置节点i+1对其的拉 力, 并 且ηi,i-1为节点间的绳系延展率;Pi为各节点收到的摄动力;αd表征阻尼耗散因数;ηi,i-1表征Li,i-1的延展率。
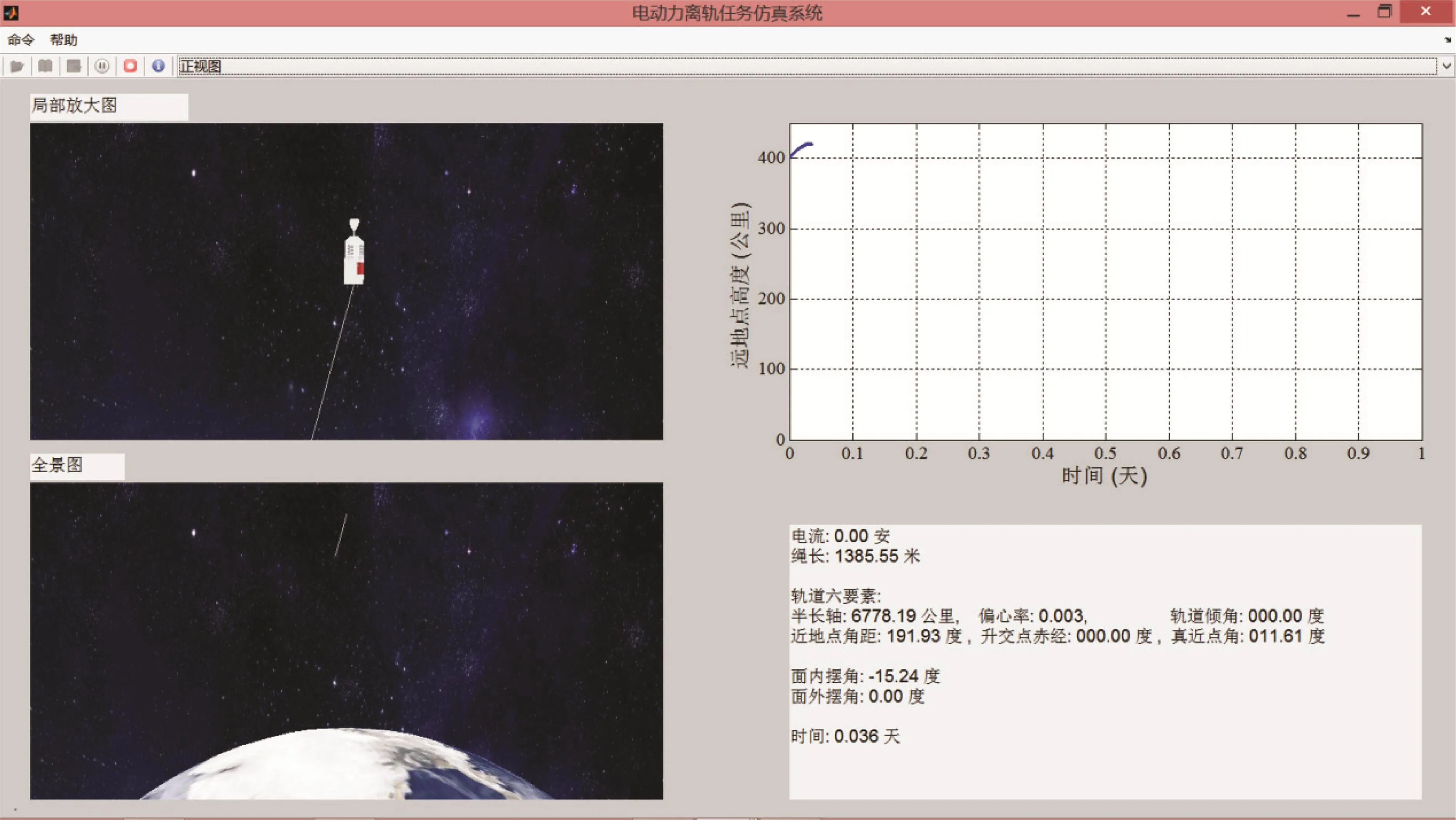
图6 仿真系统任务仿真界面Fig.6 Mission simulation interface
在电动系绳释放阶段本质上包括两个过程:初始弹射过程和主动释放过程,前者依靠机构将绳系自由弹射至空间,后者依靠绳系释放机构的摩擦力控制释放稳定性。在初始弹射过程中,需要火箭末级进行姿态控制,以避免火箭末级的不稳定影响绳系的释放。同时,绳系释放的两个过程拟采用下述释放控制策略[19]:
(1)绳系初始弹射过程中,可以任其自由释放,不加控制;
(2)绳系主动释放过程中,绳系系统可采用经典Kissel控制方法。
上述策略能够保证绳系稳定释放,同时火箭末级姿态不发生大幅翻转。
针对电动力绳系离轨过程,由于离轨时间较长,为控制计算规模,对原始模型进行化简,不再考虑火箭末级和末端载荷的姿态变化,并将其视为质点,那么绳系运动可由下述刚性模型描述:

式中,θ、φ分别为绳系俯仰角和偏航角,用于表征绳系摆动幅度;Qθ和Qφ分别为与俯仰运动和滚转运动对应的广义力。
离轨过程中系统的轨道动力学模型可描述为轨道参数缓慢变化的轨道摄动方程,参见式 (1)。
电动力绳系离轨阶段,需要控制绳系振幅在允许范围内,确保能够实现火箭末级降轨,该阶段拟采用电流开断控制方法作为稳定控制策略,算法计算规模小,检测量便于获取,易于工程实现。
4.2.2 试验研究
为验证绳系释放过程动力学分析与释放控制方案的有效性,搭建了绳系动力学与控制地面试验系统,如图8所示。该系统主要包括花岗岩气浮平台、双目视觉动态测量系统、图像处理工作站、飞行器气浮仿真器和系绳[20,21]。
地面试验系统根据动力学相似原理设计,利用气浮装置和喷管模拟重力梯度力和Coriolis加速度作用,以计算机视觉和无线局域网技术为基础建立物理仿真实验平台,在此基础上开展绳系释放仿真实验研究。

图8 绳系动力学与控制地面试验系统Fig.8 Ground test system for tethered dynamics and control
4.3 等离子接触器设计与试验技术
电动力绳收集发射电荷是形成绳系电流的有效途径,需开展高效电荷收集发射装置的研究。目前实现等离子电荷交换的技术方式主要有电子场发射阵列技术[22]、空心阴极技术[23]、热电子阴极技术。这些技术主要用于为电动力绳系提供电荷收集与发射的功能,从而产生洛伦兹力使得上面级自动离轨。空心阴极等离子体接触器结构独特,具有寿命长、发射电流大、电流发射效率高、体积小、重量轻、结构紧凑牢固、抗振动能力强、在轨运行时间长的特点,能够适应空间技术对电子元器件的多方面要求,空心阴极技术目前是理想的方式,是实现等离子交换的主要实现途径。
采用一维模型对空心阴极接触器中等负偏置电压下的C-V特性进行分析。模型主要分为JX模型和PK模型,其均为简化的一维模型,JX和PK模型分别通过不同理论求得接触器羽流在电势单调减的电势场内离子和电子的密度分布形式及C-V特性。JX模型通过联立泊松方程 (电场求解方程)求得接触器的放电特性;PK模型则假定认为等离子体是准中性的 (即羽流区域离子密度等于电子密度),从而推导出接触器的放电特性。
两个模型的共同特点是把等离子体接触器出口认为是一个虚拟球心,并认为等离子体运动方向是全向的。实际工作的接触器,等离子体从触持极小孔运动出来并向周围膨胀,小孔中心轴线上存在一个主流区域,在这个区域等离子体速度主要是沿轴线方向,这与模型的假设有很大不同。为了简化,数值模型中只考虑离子和电子的运动。在进行数值仿真时,采用三维模型对接触器羽流区域进行建模。但由于接触器的羽流的等离子体参数分布是关于小孔中心轴线对称的,因此在建立羽流区域模型时可以用二维轴对称模型代替三维模型。
空心阴极等离子体接触器与环境等离子体的电荷交换主要依靠其形成的羽流完成,因此,通过对其羽流进行仿真可以了解其与环境等离子体电荷交换过程的情况。
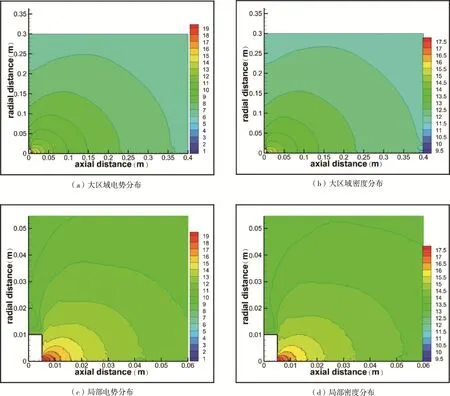
图9 数值模型羽流计算结果Fig.9 Plume computing results of numerical model
图9给出了在等离子体初始密度n0=1017.7m-3,等离子体初始电势φ0=20V和电子温度θ=1eV时的数值模型羽流计算结果,图左列为等离子体电势分布,图右列为等离子体密度分布。从图中可以看出,等离子体相关参数在其触持极出口小孔处最大,且在靠近触持极出口附近存在一个核心区,在这个区域内等离子体电势和密度均较高且接近出口处的大小,随后由于等离子体膨胀至外环境,其电势和密度均不断下降,最终与环境等离子体相关参数一致。等离子体接触器产生的等离子体团通过其自身建立的电势场不断向外环境运动,并形成稳态的 “等离子体桥”,从而完成接触器与外界环境等离子体的电荷交换过程。
通过空心阴极地面真空舱试验对空心阴极发射电流-偏置电压曲线 (C-V曲线)进行测试,如图10所示。从图中可以看出,地面试验所用空心阴极可以发射5A的电子电流,故其性能满足设计指标。由于空心阴极在40~50V范围内放电电流变化较大,可以知道40~50V为其钳位电压。要达到相同的发射电流,氙气流量越大的情况下所需要的偏置电压越低。

图10 空心阴极C-V特性Fig.10 C-V performance of hollow cathode

图11 空心阴极C-V特性理论模型计算结果Fig.11 Computing results of C-V performance theoretical model of hollow cathode
PK模型的计算如图11所示,可以看出在曲线的走势上,和试验得到的结果吻合,当流量增大,同样的偏置电压下空心阴极能发射更多的电子电流;空心阴极的钳位电压也处于40~50V之间。
5 结论
电动力绳系技术在废弃卫星及火箭末级残骸清理、航天器轨道转移等领域具有巨大的潜在应用价值,我国在电动力绳系技术方面有一定的研究基础。本文提出的空间平台电动力绳系离轨装置,系统介绍了装置方案、组成及关键技术突破情况。经研究及试验表明,电动力绳系离轨在理论上和工程上具备可行性。后续,应结合航天实际工程,逐步对关键技术进行攻关研究,推动电动力绳系的工程化应用。
猜你喜欢
再生资源与循环经济(2022年9期)2022-11-20
汽车实用技术(2022年11期)2022-06-20
控制与信息技术(2022年2期)2022-05-24
机电信息(2022年9期)2022-05-07
物联网技术(2021年11期)2021-11-22
军民两用技术与产品(2021年10期)2021-03-16
电力与能源系统学报·中旬刊(2020年1期)2020-06-30
科学家(2017年24期)2018-01-11
国外科技新书评介(2014年8期)2014-12-05