单交变光场余弦透光面集成化时栅传感器研究
2020-09-15 05:16李昌利蒲治伟余小雨张双亚
仪表技术与传感器 2020年8期
付 敏,李昌利,朱 革,蒲治伟,余小雨,张双亚
(1.重庆理工大学机械工程学院,重庆 400054;2.重庆理工大学机械检测技术与装备教育部工程研究中心时栅传感及先进检测技术重庆市重点实验室,重庆 400054)
0 引言
光栅以栅距作为测量基准,具有对测量环境的要求低、结构紧凑、成本较低等优势,是一种广泛运用的光学位移测量方法[1-2]。1953年,英国Ferranti公司建立了采用莫尔条纹的位移测量样机并取得了专利,光栅开始应用于位移测量领域[3]。传统光栅采用四场扫描技术实现位移测量[4-5],但当个别感光元件受到污染或出现故障时,光栅测量精度存在很大误差。一种采用栅状的感光元件的单场扫描光栅被提出,它具有更小的信号噪声、对污染干扰不敏感和更高的定位精度[6-8],如:海德汉公司于2005年推出了LC系列绝对式光栅尺。但其实现难度很大,包括高质量的光栅栅线制作、光电接收电路与转换电路集成难度大、复杂的信号处理系统等。国内开展了大量单场式光栅研究工作,其中长春光学精密机械与物理研究所已经具备独立制作单场式光栅能力[9-10],但传感器整体性能与国外先进水平有较大的差距。为减小精密测量对制造工艺的依赖程度,提出了光场式时栅测量方法[11]。文献[12]提出一种光强正交调制的光场式时栅测量方法,试图采用交变光场和正弦透光面实现用电信号的时间差对位移的精密测量。文献[13]用两路正交的交变光场和两排空间调制的正弦透光面,用0.9 mm栅距,在108 mm量程内实现了±0.5 μm的测量精度;但大面积出光面的光源设计和制作困难,影响了传感器性能提高;文献[14]提出一种多光场单排双正弦透光面的形式,用0.6 mm栅距,在180 mm量程内实现了±0.4 μm测量精度,但存在多光场的一致性难以保证、体积大难以集成等问题,限制了该方法的工程化应用。
本文提出采用单光场保证光源的一致性,降低光源制造要求,简化传感器结构;采用更大面积的上、下双余弦透光面,增加透过每个透光面的光通量和光电流信号信噪比;对传感器结构和电路进行集成化设计,提高了传感器的稳定性和可靠性,为产品化方向发展提供了思路。
1 多光场传感器存在问题分析
多光场正弦透光面时栅传感器由4个光源、动极板、定极板和光电池组成,如图1所示。首先由激励电路板对4个光源分别通入时间相位依次相差90°的激励信号(即:Imcos(ωt)、Imcos(ωt+π/2) 、Imcos(ωt+π)、Imcos(ωt+3π/2),获得4个正交的交变光场,即实现时间调制。动极板由间距为W的交替透光的矩形透光面组成,定极板由4组周期为2W的上、下双正弦透光面组成,并且4组透光面之间空间相位相差为W/2,如图2所示。其中,①、②、③和④分别为0°、90°、180°和270°透光面。定、动极板之间相对运动实现空间调制。通过空间调制和时间调制得到4路光电信号,然后对其求和获得电行波信号来实现位移测量。
这种方法在光源加工和制造过程中存在制造偏差,使得4个光源一致性难以保证,如图3所示。4个交变光场的均匀性和一致性难以保证,使得传感器的可靠性和稳定性较差,引入较大的测量误差。同时,多光场的测头体积大,对传感器各部分的安装和加工要求高、成本高,难以集成,其传感器结构如图4所示。
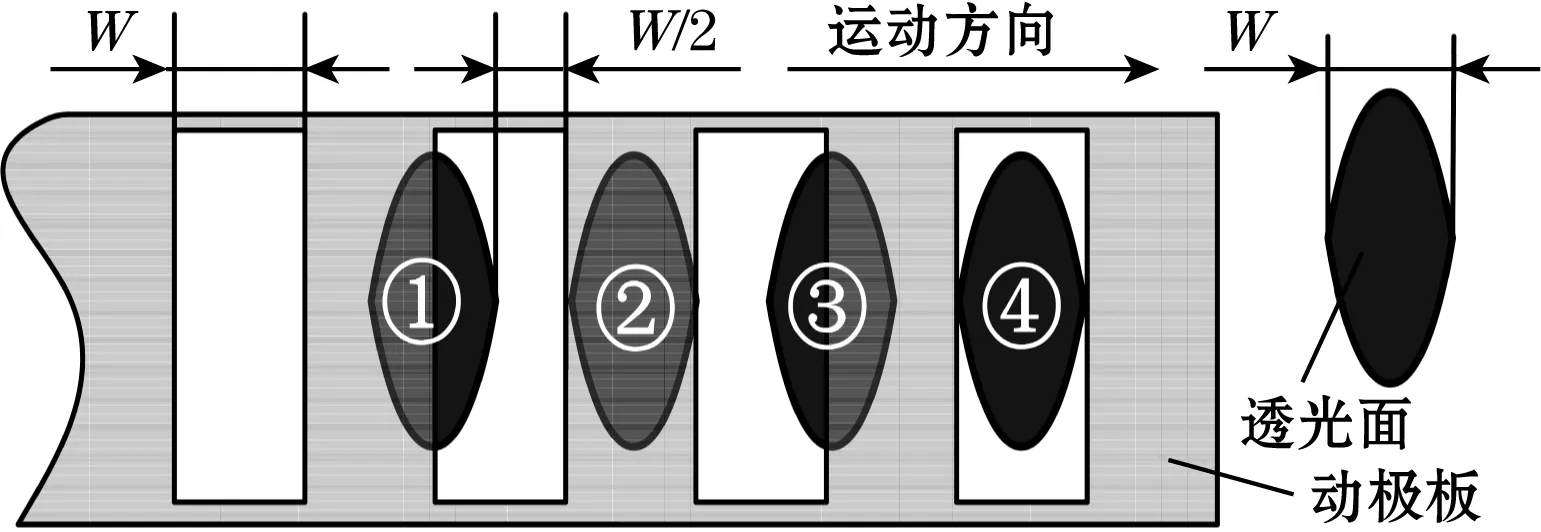
图2 多光场时栅正弦透光面空间排布
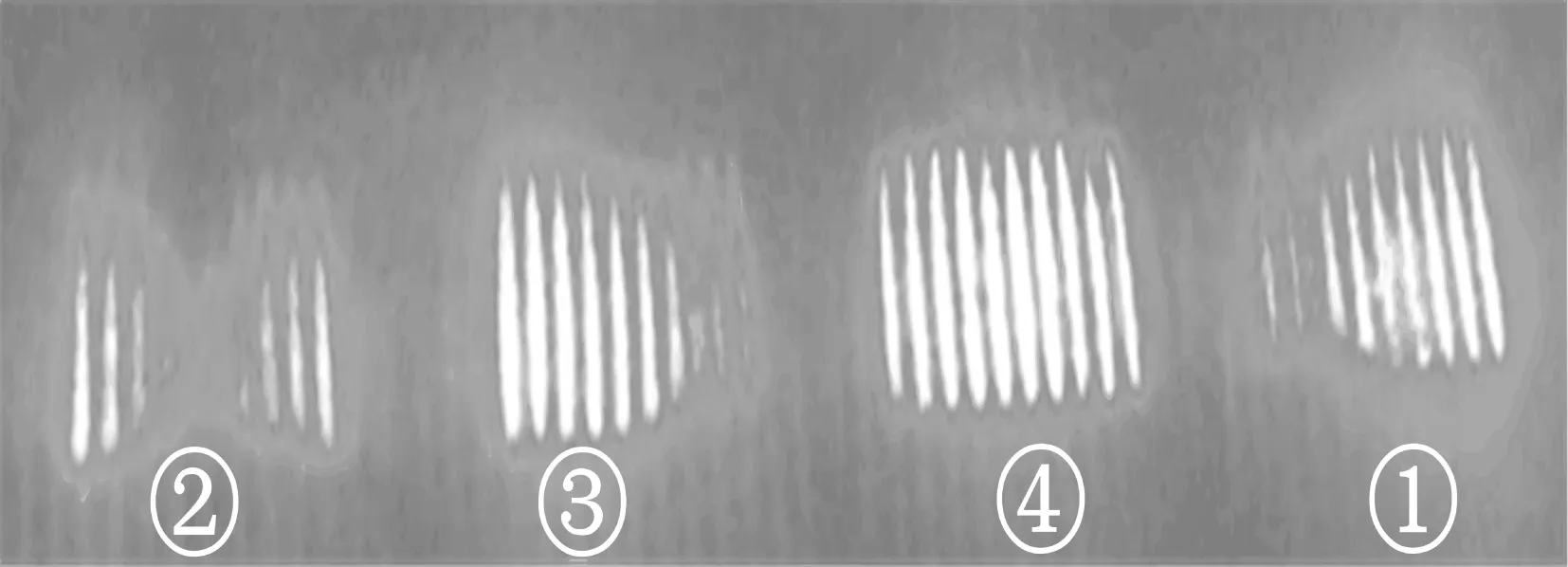
图3 多光场透光面面形效果
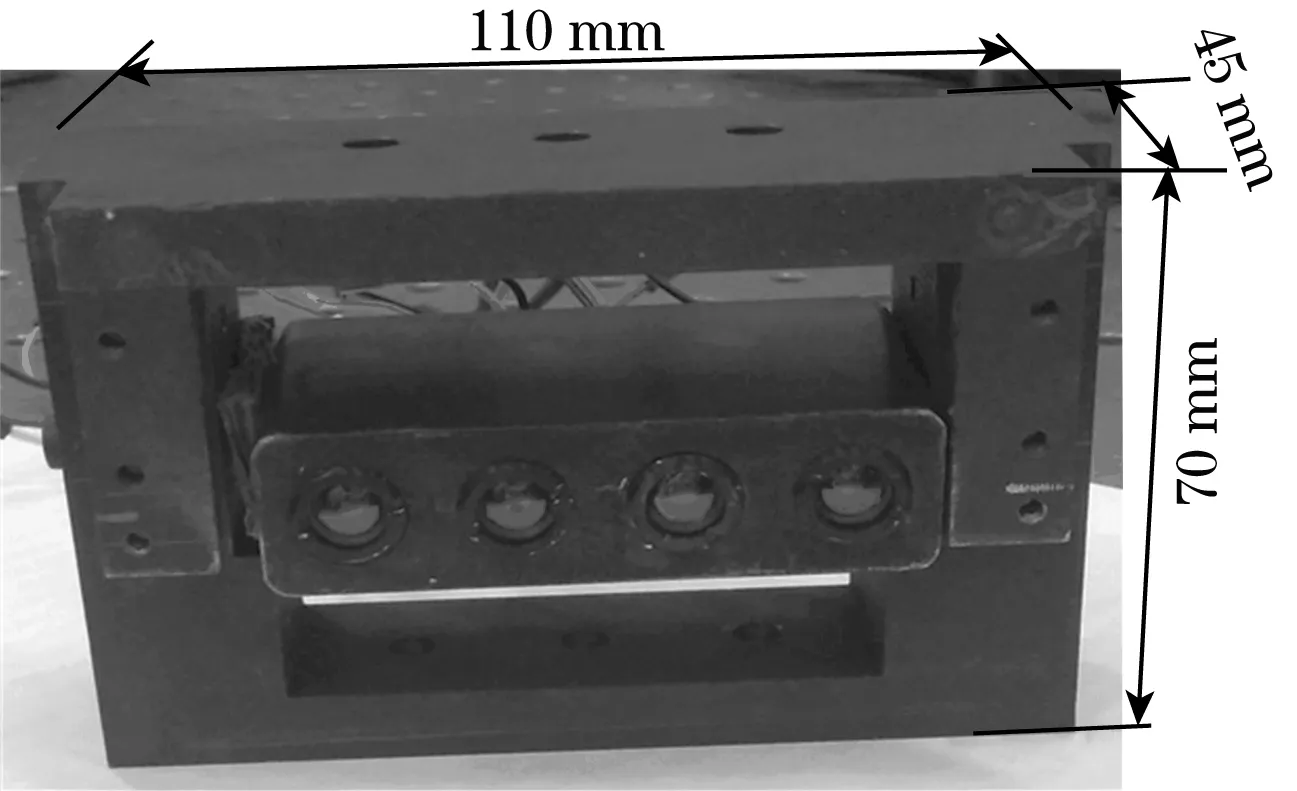
图4 多光场时栅传感器结构
为解决以上问题,开展了单光场时栅传感器研究,如图5所示。该方法采用单光场时空调制方法减少传感器测头体积,提高传感器的可靠性和稳定性,同时,降低光源加工要求和成本。

图5 单光场时栅结构模型
2 单光场测量原理及结构设计
2.1 测量原理
由于在单光场结构中,透光面面积变化情况比多光场结构要小很多,为了使单光场结构获得同样的光信号质量,将原有离散排列的正弦透光面,改成连续排列的余弦透光面。正弦透光面与连续余弦透光面的对比如图6所示,在不改变透光面宽度的情况下,较大幅度增加透光面积的变化范围,即提高信号的信噪比,从而提高有限空间内光强信号调制的质量。
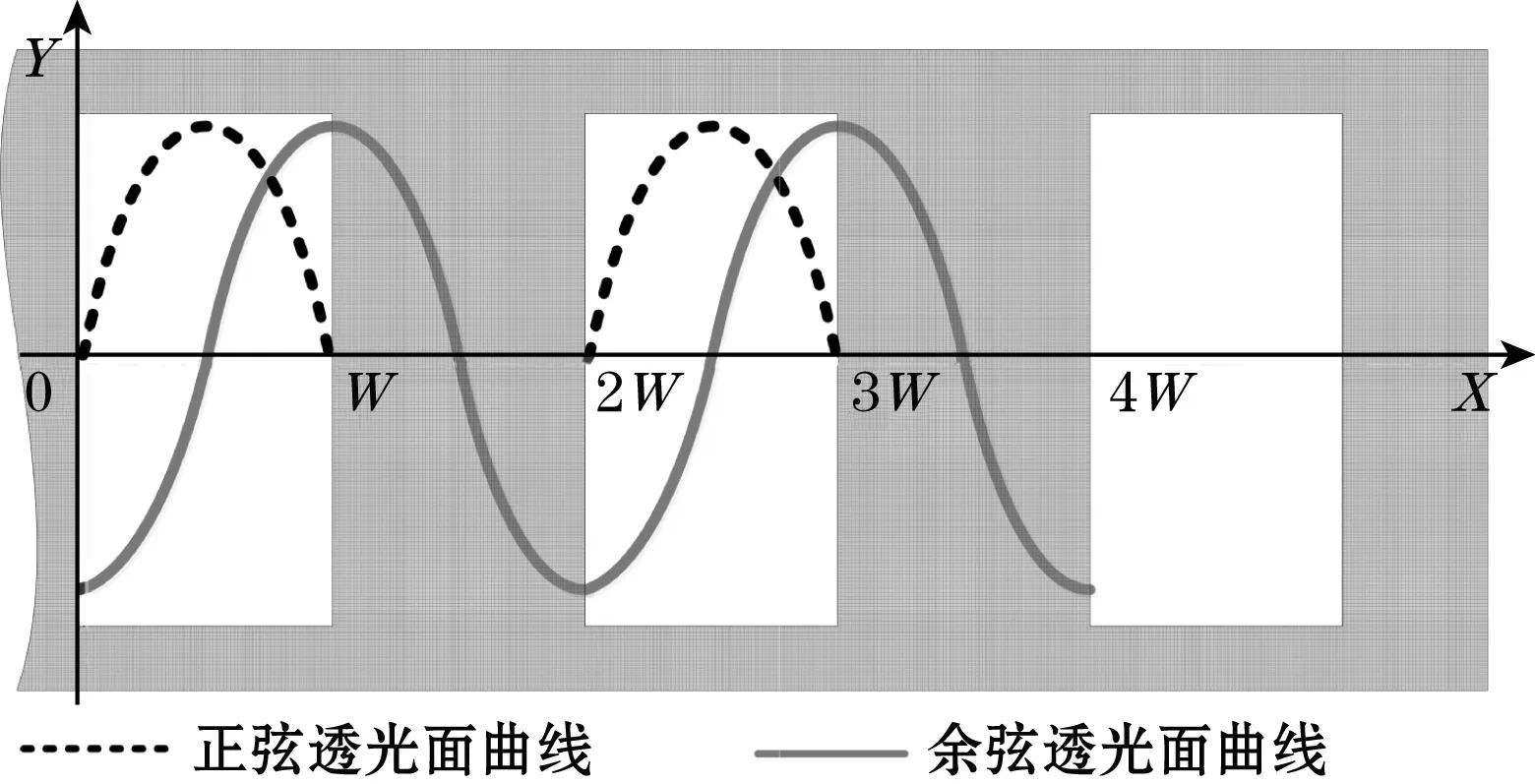
图6 正弦透光面与余弦透光面对比图
单光场余弦透光面时栅定、动极板运动位置关系,如图7所示。其中,①、②、③和④分别为0°、90°、180°和270°透光面。

图7 定、动极板余弦透光面空间排布
以0°透光面进行分析,如图8所示。
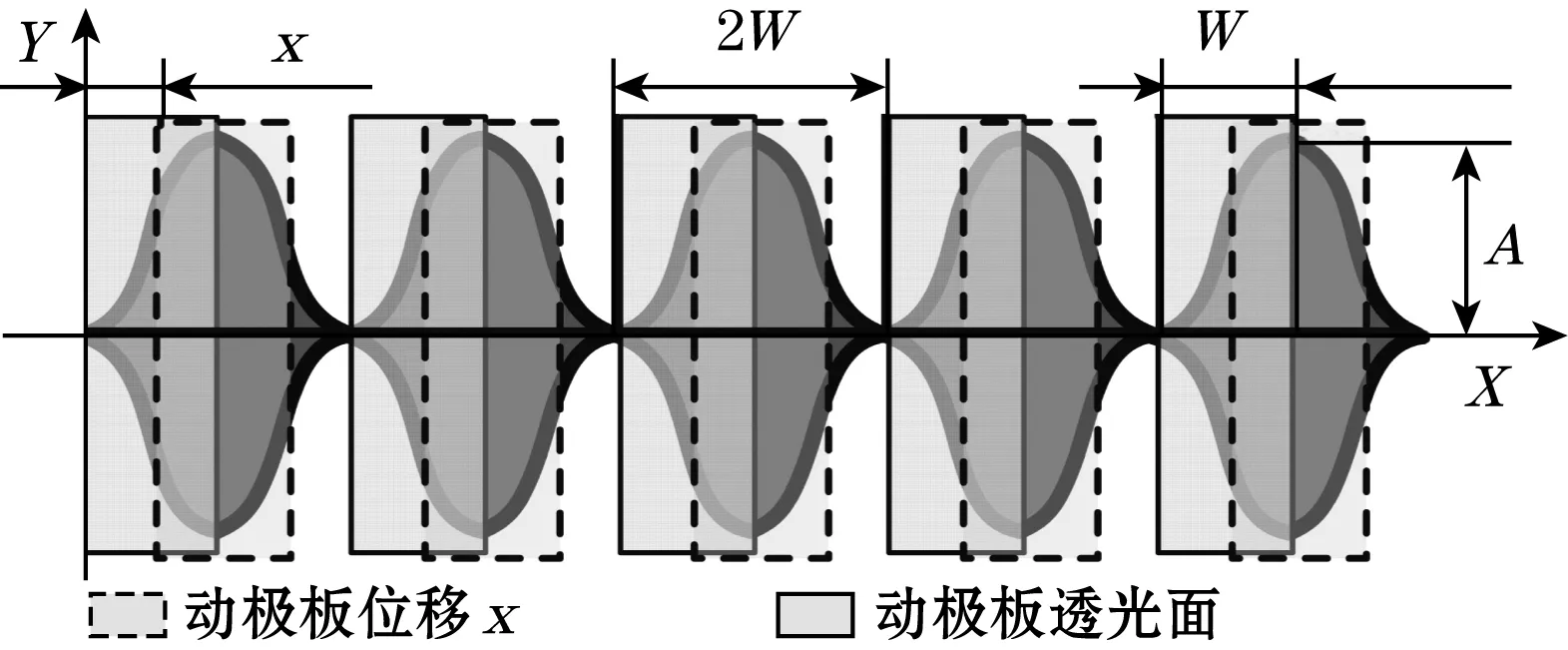
图8 0°透光面的动、定极板相对运动关系
动极板从初始位置向右移动距离为x。已知动极板上余弦透光面透光轮廓线与位移之间的关系:
y=A[1-cos(πx/W)]
(1)
式中:A为余弦透光面的幅值;W为余弦透光面的半周期(动极板栅距);x为透光面移动的位移量。
根据4组余弦透光面的透光面积与动极板位移的相互关系,4组余弦透光面(0°、90°、180°、270°)的透光面积的变化规律为:
(2)
4路光电流信号为:
(3)


(4)
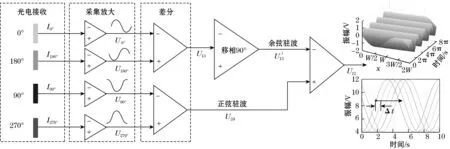
图9 单光场时栅测量原理
利用得到的电行波信号经过滤波、整形转换为方波信号,在FPGA里与同频率、同幅值的参考信号鉴相处理。利用高频时钟脉冲插补参考信号与行波信号之间时间相位差,即时间量。根据时间量可获得动极板与定极板相对位移值,实现时间量对位移空间量测量。
2.2 集成化结构设计
2.2.1 结构设计
光源采用LED光源,接收采用集成芯片,对传感器结构进行集成化设计。其结构主要包括光源部分、测头、定极板部分与光电接收部分,如图10所示。对比图4可以看出传感器体积明显减小。传感器固定于实验平台上,动极板固定于导轨上,实现了动、定极板相对位移,从而实现高精度直线位移测量。
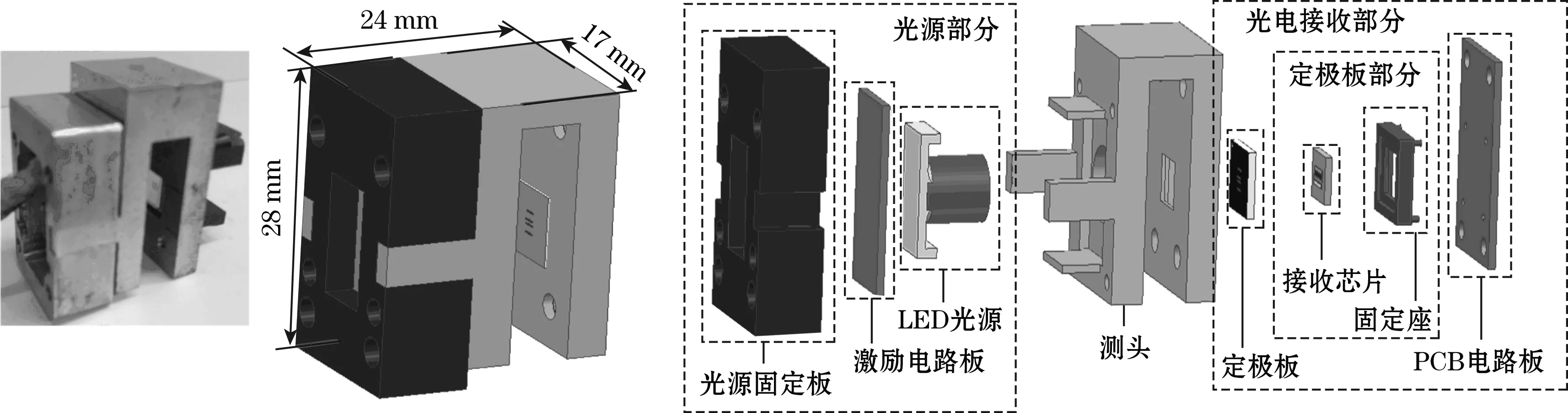
图10 单光场时栅传感器集成化结构模型与实物图
定极板固定座是为了保证定极板和光电接收进行精准定位设计的结构,如图11所示。将定极板安装在台阶槽内,用台阶槽进行粗定位,精定位用透过定位孔和定极板圆形透光面的光电信号变化进行定位,减小了安装误差。由于光电接收是固定在PCB板上,因此设计了引脚。这些方式实现了传感器集成化设计,便于安装,操作简单、可靠。同时,定极板和光电接收之间距离可以通过引脚的插入深度进行调节。

图11 定极板固定座结构模型与实物图
2.2.2 采集电路设计
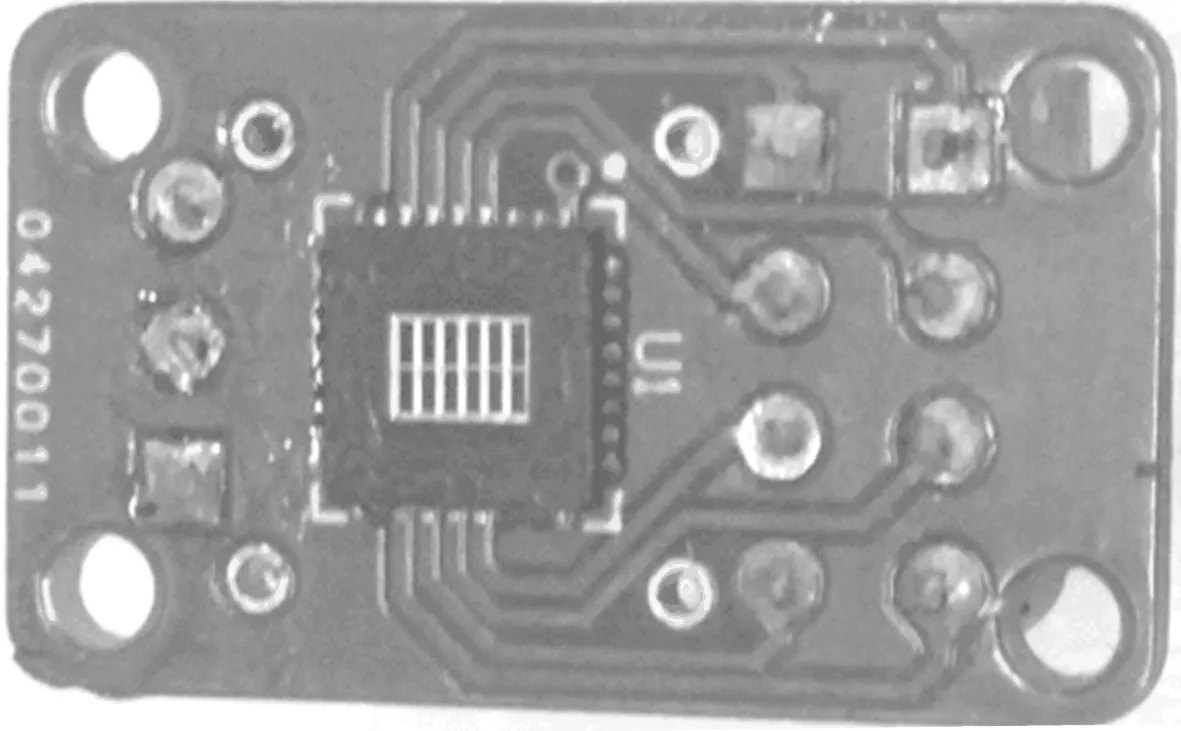
图12 集成化采集电路实物图
为了减小传感器体积、保证测量可靠性和稳定性,采用集成光电接收芯片作为接收器。同时,为方便后续电路处理,接收部分需以电压信号输出。针对以上要求,设计了如图12所示的电路。这种方式将光电接收和光电转换在一个芯片上实现,提高了信号的质量和传感器的抗干扰性。
3 余弦透光面优化的仿真分析
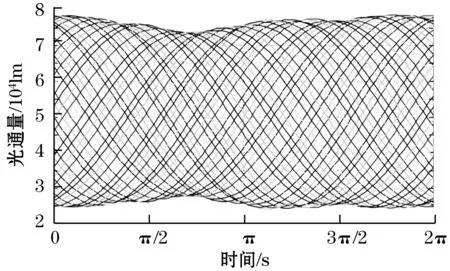
为了验证连续余弦透光面的有效性,通过光学仿真软件(TracePro)对正、余弦透光面进行仿真分析。根据测量理论建立了仿真模型,如图5所示。L=8 mm,γ=0 mm,δ=0.5 mm,D=0.75 mm,W=0.3 mm。仿真过程中除了定极板透光面形状不同外,其他条件都相同,并且动、定极板之间相互平行安装(理想条件下)。动极板以0.01 mm的步距移动,采集1个周期(2W=0.6 mm),即采集60个点。用Matlab对采集的数据进行分析,得到一个周期内每组透光面的光通量变化曲线,更进一步获得电行波信号和其谐波成分图,如图13、图14所示。
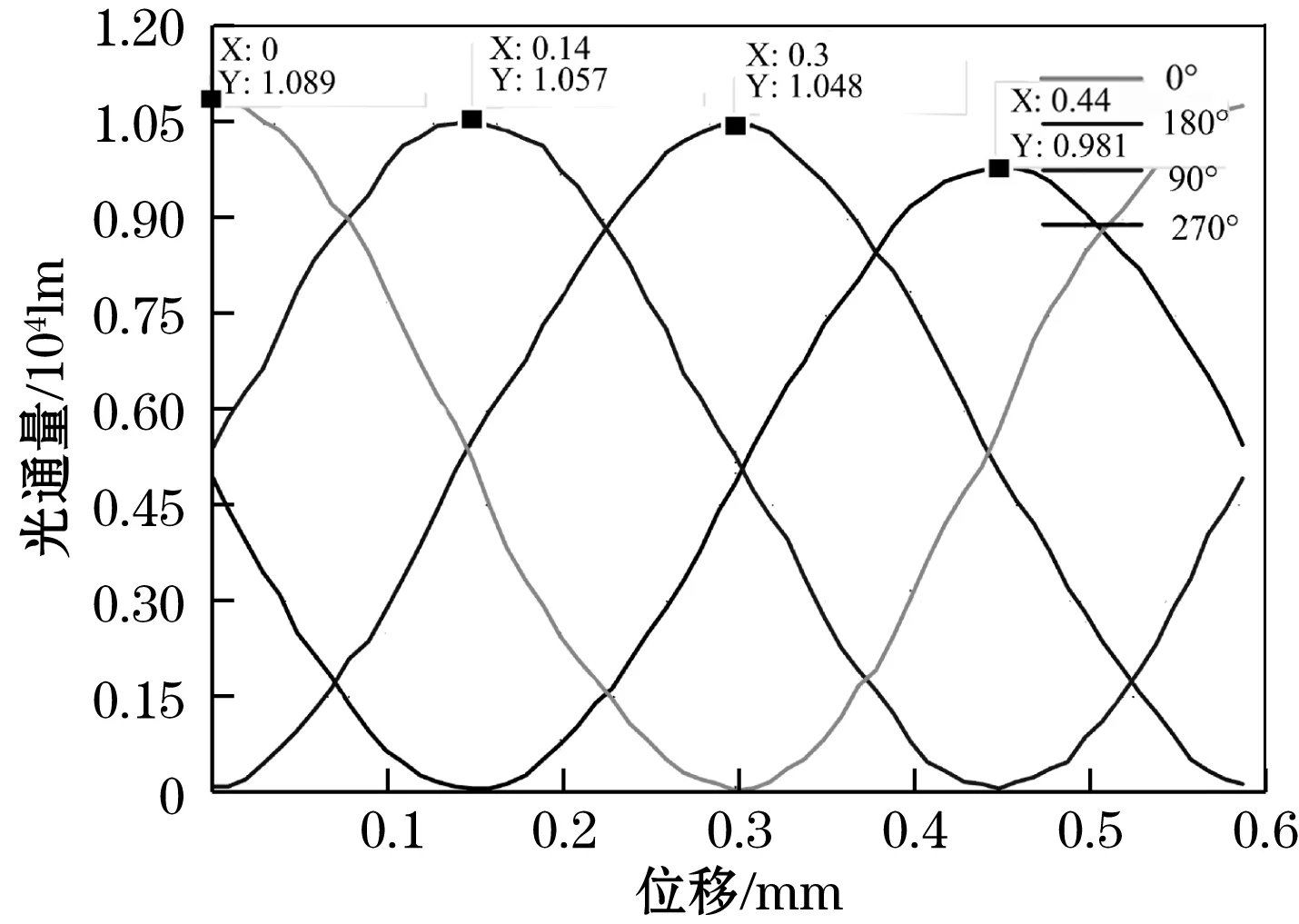
(a)4组透光面光通量变化曲线
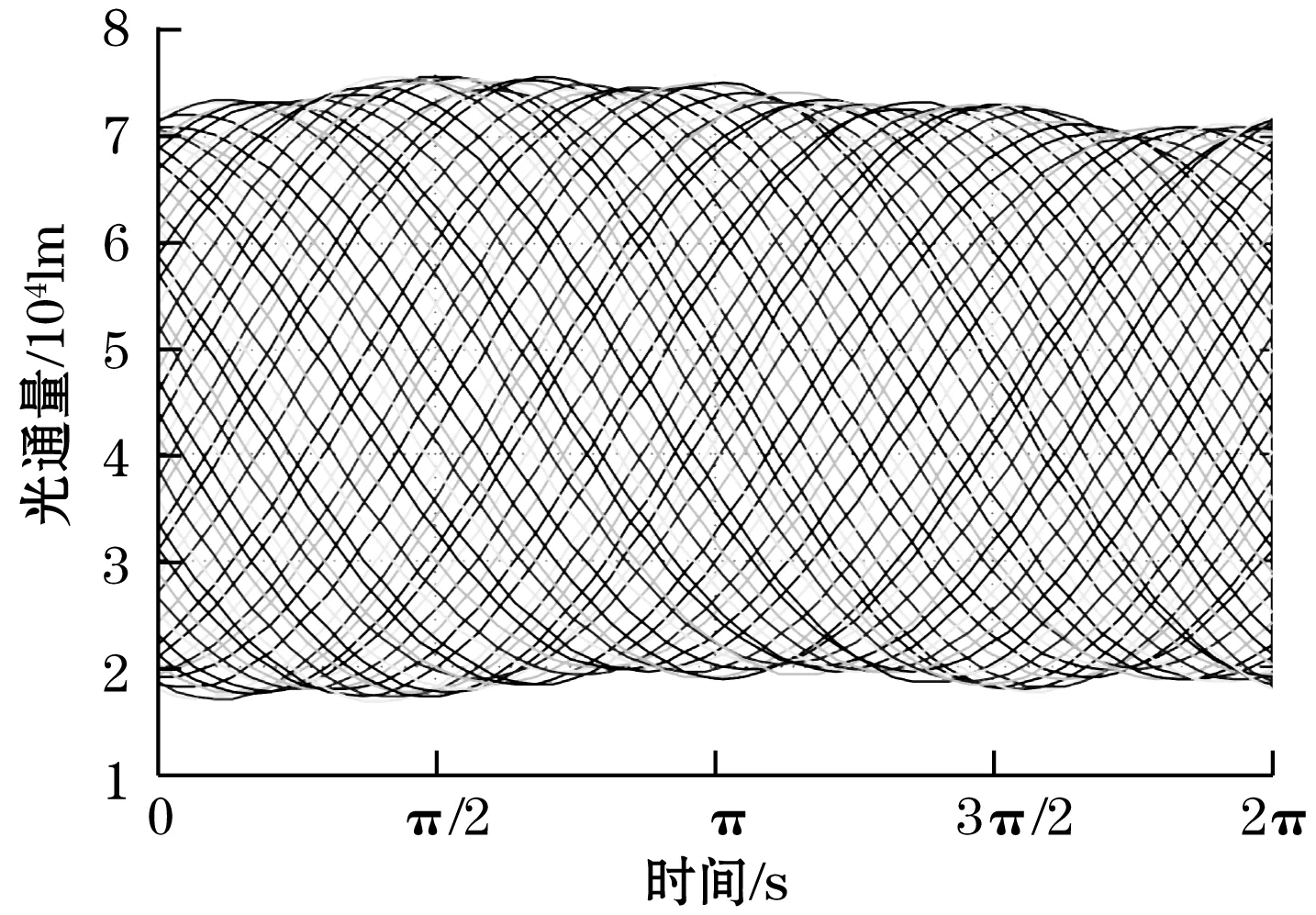
(b)电行波信号
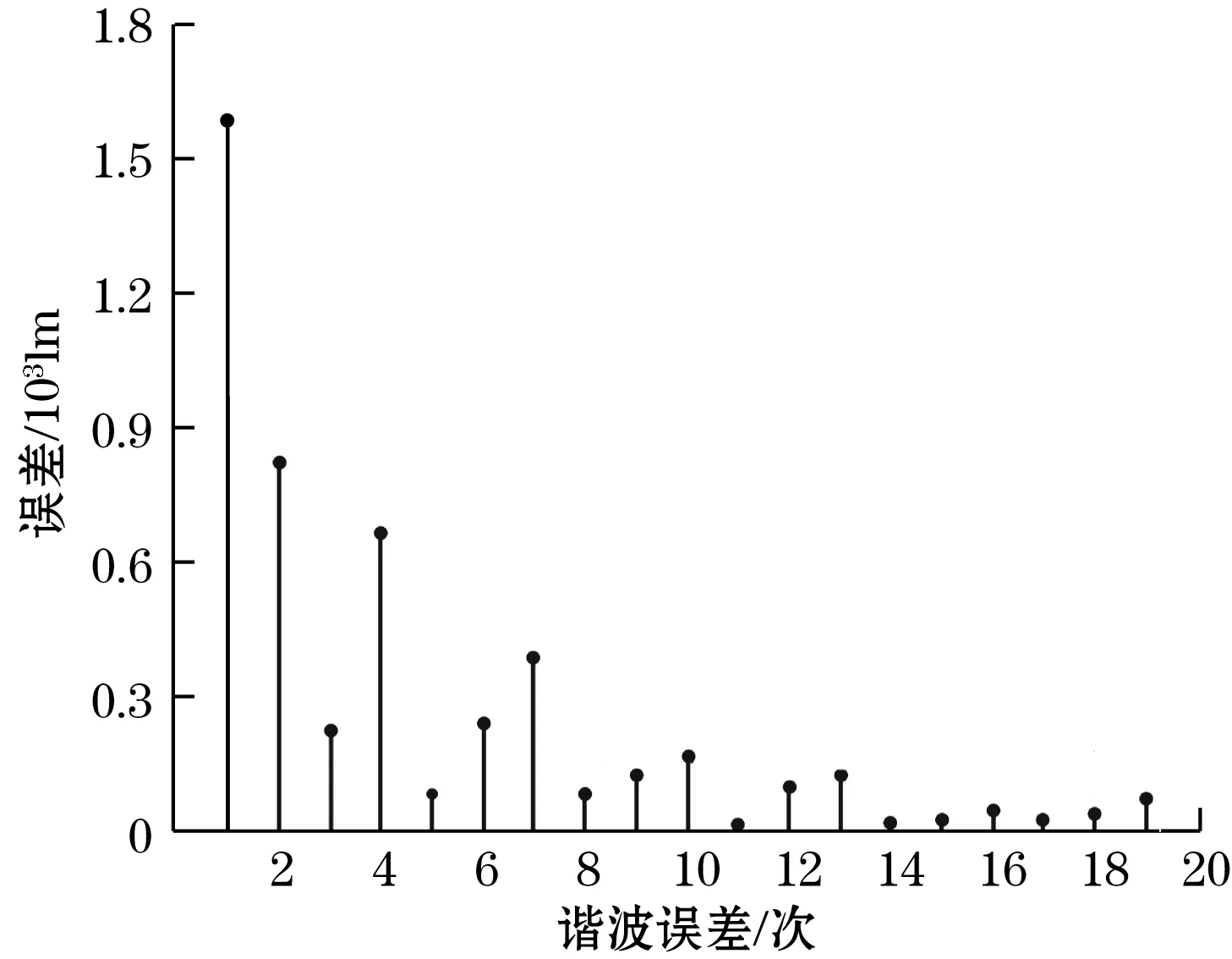
(c)电行波信号谐波误差图13 4组正弦透光面光通量变化曲线、电行波信号及其谐波误差
正弦透光面时栅的4组正弦透光面光通量的平均振幅值为5 219 lm,主要误差成分为一次、二次和四次谐波误差,如图13所示。余弦透光面时栅的4组余弦透光面光通量的平均振幅值为6 521 lm,主要误差成分为一次、二次和三次谐波误差,如图14所示。
对比图13、图14可以看出:4组光电信号(光通量)的平均幅值增加了0.25倍。4组光通量得到明显提高,获得了较好的信噪比信号。电行波信号和误差成分也都得到了优化。验证了余弦透光面优化信噪比的正确性和可行性。

(a)4组透光面光通量变化曲线
(b)电行波信号

(c)电行波信号谐波误差图14 4组余弦透光面光通量变化曲线、电行波信号及其谐波误差
4 实验研究
根据理论和仿真,搭建了实验平台,如图15所示。单光场时栅传感器实验采用FPGA产生的激励信号(ω=1 kHz)驱动LED光源。定极板与动极板采用光学镀膜的方式,动极板定制透光面宽度为0.3 mm的矩形透光面,定极板分别采用相同周期和幅值的正弦透光面和余弦透光面(2W=0.6 mm,A=0.1 mm)。动极板采用PRO225LM精密直线导轨平台以0.01 mm的步距驱动。光电接收采用光电接收芯片(IC-LSCQFN32-5*5),并焊接在PCB电路板上。光电信号通过后续电路处理后,送入传感器测量系统,将电行波信号转换为位移数据。利用RENSHAW XL-80激光干涉仪测量值作为参考值,得到误差曲线进行分析。
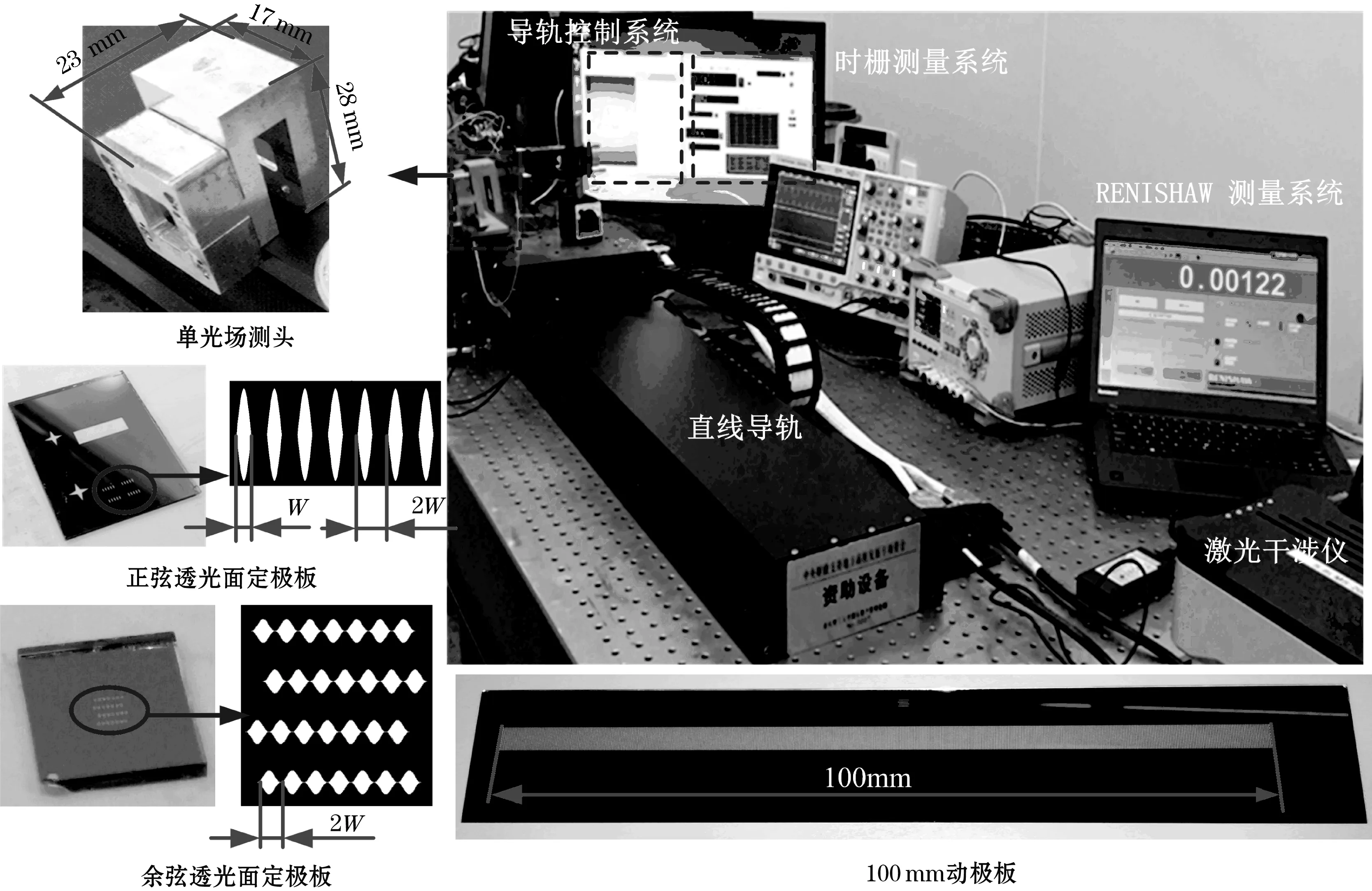
图15 实验平台
为了进一步验证余弦透光面优化的有效性,实验时取2个周期长度(4W=1.2 mm)进行测试,导轨移动步距为0.01 mm。即在传感器测量系统中采集120个点,每个点的值就是传感器实际位移测量值。单光场正弦透光面传感器测量精度为:±1.39 μm,谐波误差成分以一次、二次、四次误差为主,如图16所示。
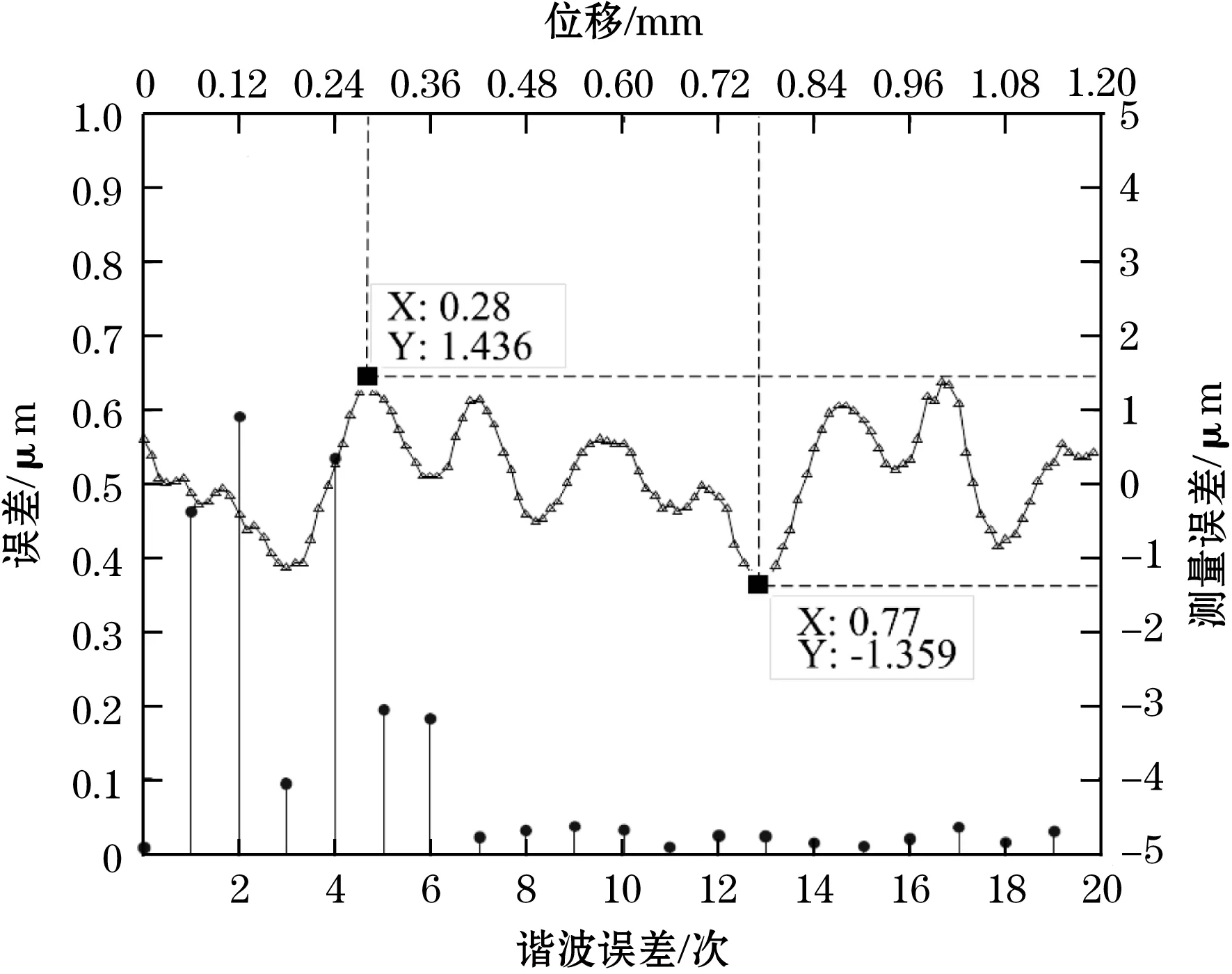
图16 正弦透光面误差曲线和谐波成分
单光场余弦透光面传感器测量精度为±0.14 μm,以一次、二次、三次和四次误差为主,如图17所示。

图17 余弦透光面误差曲线和谐波成分
可以看出测量精度提高了将近10倍,一次、二次和四次谐波误差也明显减小了。从实验上验证了采用连续余弦透光面优化的有效性。
对单光场余弦透光面时栅传感器优化之后,进行长周期测试(100 mm)。导轨移动步距为0.5 mm,即采集200个点。采用傅里叶谐波修正方法进行实时修正,获得传感器误差曲线,如图18所示。实验表明:在100 mm的测量范围内经过误差修正后传感器的测量精度可以达到±0.2 μm。
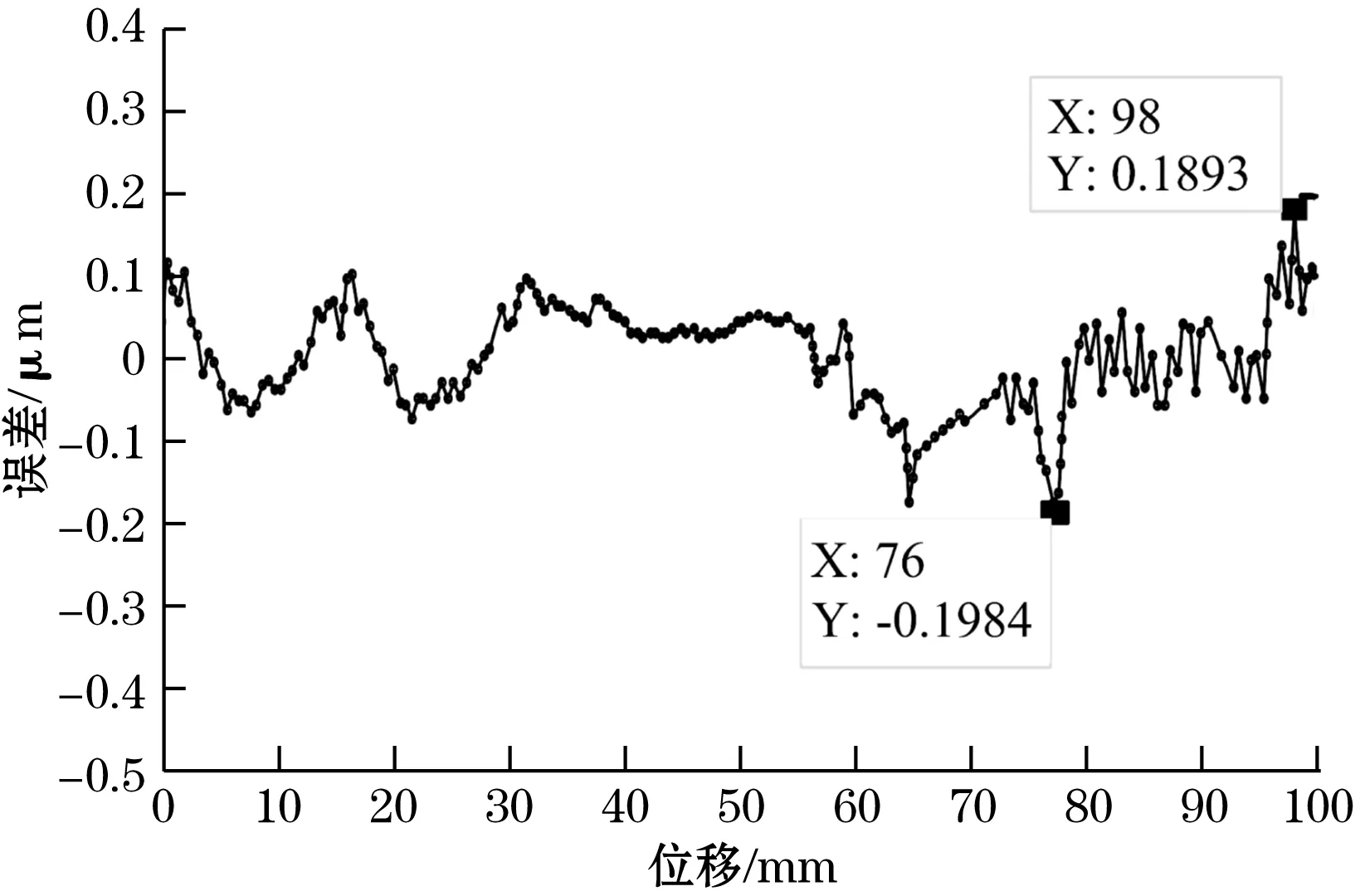
图18 修正后100 mm测量范围的误差曲线
5 结束语
本文对单光场集成化时栅传感器的结构模型、工作原理作了详细分析,并结合仿真和实验验证了这种方法的有效性和可行性。得出以下结论:
(1)对单光场时栅传感器结构和电路进行了集成化设计,使传感器测量稳定性和可靠性得到提高。
(2)采用连续上、下双余弦透光面提高了每组透光面的光通量,进一步提高了4组光电信号的信噪比,有利于后续信号处理。
(3)通过对传感器的改进与优化,在100 mm测量范围内,栅距为0.6 mm,测量精度可以达到±0.2 μm。
猜你喜欢
电子与信息学报(2022年5期)2022-05-31
科技视界(2021年4期)2021-04-14
石油管材与仪器(2020年5期)2020-11-05
科学(2020年5期)2020-01-05
无机盐工业(2019年5期)2019-05-24
中学数学杂志(高中版)(2016年6期)2017-03-01
中学生数理化·高二版(2016年10期)2016-12-24
福建中学数学(2016年7期)2016-12-03
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
职业技术(2015年8期)2016-01-05