永磁同步电动机设计关键技术与方法解析
2020-09-10 07:22罗秋华
内燃机与配件 2020年17期
罗秋华

摘要:近些年,国内电力测控及电子技术均有很大发展进步,这在很大程度上助力于無刷直流电机(BLDCM)功能完善过程。本文主要探究基于DSP的BLDCM控制系统设计思路,主要包括硬件与软件设计两大方面。规划设计出的控制系统将触摸式一体机作为上位机,还采用了电机设备专用的DSP芯片TMS320LF2407A作为下位机,该芯片是系统控制的核心部门,上、下位机两者密切配合实现对BLDCM运行状态的有效调控。
关键词:无刷直流电机;控制系统;DSP;系统设计
0 引言
无刷直流电机(BLDCM)是以有刷直流电机为基础而发展起来的,其不仅存留了有刷直流电机良好的调试性能,且在低噪音、体积微小、散热性、控制敏捷度、高效率、使用寿命长等诸多方面均占据优势,这是BLDCM在汽车、家用电器、医疗器械等诸多领域中广泛应用的主要原因,其将其他类型的多种电机取而代之。现如今,业内诸多认识开始重视BLDCM的研究工作,并付出了很大努力,电机控制系统开发设计是该领域中研究的热点之一。
1 BLDCM的基本工作原理
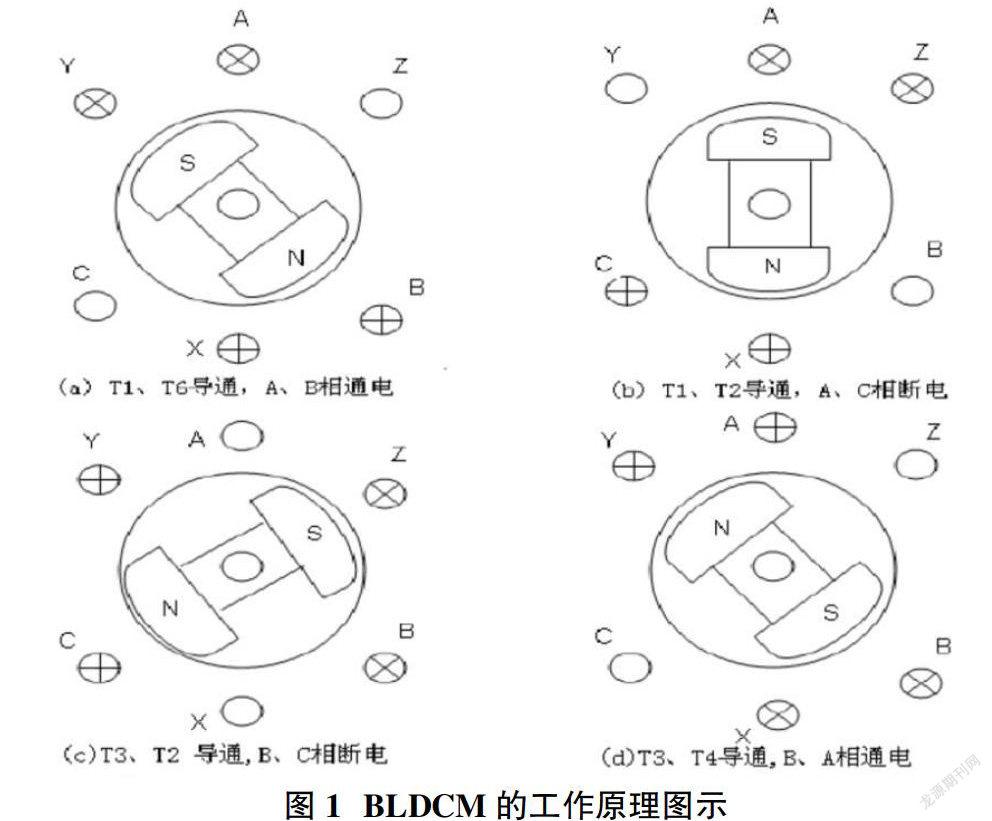
电机自体的电枢绕组是三项星型衔接,位置传感器和电机转子同轴,控制电路转换位置信号以后会形成控制信号,驱动电路隔离、放大控制动信号以后,有效调控逆变器的功率开关管,这样电机的各相绕组均能依照一定次序有序运作(图1)[1]。
见图1,当转子按照顺时针方向旋转至图(a)所示位置时,转子位置传感器传输出的信号历经控制电路转换处理后对逆变器起到驱动作用,T1、T6导通,实质上就是A、B两相绕组均有电流通过,电流经由电源正极流出,途经T1流进A相绕组,而后经B相绕组流出,过T6返回至电源负极。在以上过程中定转子磁场相互作用,驱动电机转子按照顺时针方向转动。
当在空间上转子转过60电角度,抵达图(b)所示方位时,传感器传输出的信号被转换后驱动逆变器,T1、T2导通,A、C两相绕组通电,电源正极有电流流出,经T1流进A相绕组,从C相绕组流出,经T2返回至电源负极。定转子磁场相互作用,使电机转子按顺时针方向持续运转。
电机转子每在空间转过60电角度,逆变器开关就进行一次切换动作,功率开关的导通逻辑可做出如下阐述:T1、T6-T1、T2-T3、T2-T3、T4-T5、T4-T5、T6-T1、T6。在以上过程中,转子从始至终均被顺时针方向的电磁转矩所作用,沿顺时针方向持续旋转[2]。
图2为具有效率优化功能的电动汽车驱动用永磁同步电机系统图示,具体是于矢量控制系统基础上增设了效率优化控制器。该系统将TMS320F240 DSP设为核心,直线母线上增设了LEM电压、电流传感器,采样信号经由低通滤波后分别传送至DSP的两路A/D。
2 控制系统的硬件设计
控制系统设计阶段采用触摸式一体机作为上位机,达到人机对话,进而顺利的传导数据信息指令,并动态化监测、控制电机运转状态,用DSP芯片与BLDCM专用的芯片MC33035共同设计下位机,其作用是输出控制信号,进而更好的调控与驱动电机。控制系统基于PWM形式去调控电机的运转速度,联合使用霍尔位置传感器区精确检测转子所处方位,选用MOSFET场效应管作为系统的功率变换器[3]。在具体调控环节,DSP芯片能实时收集电机的转速信息,并以此为据,有针对性的调整际上位机设定的速度,进而协助系统实现对BLDCM转速的闭环式调控。芯片MC33035的作用主要是落实DSP芯片传导出的控制指令,进而输送出调控与电机转速、转向及启停相关的控制信号。
BLDCM控制系统的硬件部分主要由控制、驱动及检测三大部分构成[4]。
①控制部分(DSP):其作用主要是处置始源于上位机传送的控制信号与传感器的反馈信号,处理后的信号再由光电隔离处置,继而传输到驱动单元内,进而达到驱动电机转动的目的。本系统安设的DSP主控板是TI公司专门设计的数字化调控直流电机与运动的器件。TMS320LF2407A为控制电路的主控芯片,其和自体相配套的外围电路共同构成了控制系统,外围电路主要由电源转换、JTA仿真接口、时钟与复位、上位机通信及存储器拓展电路等构成。
②驱动部分:作用主要是驱动、调控BLDCM的驱动部分。MOTOROLA公司制造的专用型集成控制MC33035芯片是该部分的核心,其能接收由霍尔位置传感器反馈出的方位信号,并做适度处理,进而判断BLDCM转子所处方位的准确与否,能为控制系统运作提供驱动输入的时序,进而精确操控功率管的启、闭动作,还能接收DSP主控电路传递出的控制信号,有针对性的加以处理,进而达成操控BLDCM运转速度、方向及启停[5]。本控制系统规划设计时采用了由IR公司制造的IR2130功率驱动系统,其作用以驱动功率逆变器为主,MC33035芯片在处理方位信号以后获得的换相信号传送至IR2130电路,驱使三相桥式功率逆变电路运作过程。
③检测部分:其作用主要是动态检测BLDCM的定子电流以及转子方位与转速。衔接于三相桥式功率逆变电路内的采样电阻功能以检测定子电流为主,MC33035内装设的转子位置泽码器用于检测、捕获电机内三个转子对应的方位信号。
3 设计控制系统软件
从宏观层面上,BLDCM控制系统软件包括上、下位机两部分,其中上位机由触控式一体机组成,功能以人机对话为主,基于C#语言开发上位机程序。采用DSP应用程序与控制算法流程设计下位机。
①上位机:上位机开启人机监控界面以后,首先要设置串口通讯,和下位机DSP建设通讯协议,而后步入至监控界面,监控BLDCM的运作状态,捕获相关状态信息,把调控、调试指令经串口和DSP芯片实现通信,修整BLDCM运转阶段的各类参数。针对DAP传送的转速信号,上位机程序界面能动态化的将其呈现在适当位置,同时勾画出实时改变的曲线图,进而达到对BLDCM运转状态的动态化调控。
在设计开发上位机时,选用C#語言作为开发工具,通过规划界面与拟编流程,设计出有监控BLDCM实时运转状态的人机界面。在该上位机软件的协助下,操作人员不仅能读获BLDCM的运转状态信息,也能通过传送指令或控制按钮等传导启动、停止、运转方向调整等信号,进而准确整改BLDCM的运转状态[6]。
②下位机:上位机为达成和下位机DSP控制器的有效通信,需要经数据传输线把转速预设值、转向以及启闭信号等传输给DSP控制器,控制器在捕获电机的状态信息后,将其反馈给上位机。基于模块化的程序思想设计下位机软件,而后基于控制系统的功能需求,把下位机流程细化为数个功能模块,不同功能模块运转状态相互独立,互不干扰,将各自持有的功能发挥到最大化[7]。本控制系统下位机DSP程序模块主要包括原始化、中断服务、转速检测、模糊PID控制算法及主程序等。
4 结束语
永磁同步电动机设计阶段可供选择的关键技术与研究方法较多,本文采用专用型集成控制芯片MC33035设计BLDCM的控制系统,科学设计了系统的硬件电路,同时拟编了DSP应用流程与控制算法程序,为确保上位机监控人机界面功能充分发挥出来,利用C#语言编程,进而达到动态呈现电机运行阶段的各种参数信息,调控信号的输入过程,精确有效控制BLDCM,使其高效率运作。
参考文献:
[1]朱淑云,黄灿英,陈艳.基于DSP的无刷直流电机系统软件设计[J].沈阳工业大学学报,2020,42(03):253-258.
[2]符译丹,董恒.基于手机APP控制的电梯永磁同步电动机智能控制系统设计[J].价值工程,2020,39(09):212-213.
[3]槐孝纪,晏才松,曾纯.真空泵用大功率高转速永磁同步电机研制[J].锻压装备与制造技术,2020,55(01):39-42.
[4]陈凡东.无轨胶轮车用永磁同步电动机磁场优化设计[J].煤矿机电,2020,41(01):5-8.
[5]何少佳,张奎庆,孙天夫,等.基于RCP开发的PMSM驱动系统实验平台设计[J].制造技术与机床,2020(02):63-67.
[6]潘陶红,崔巍.一种不对称偏心气隙结构永磁同步电动机设计[J].微特电机,2019,47(12):20-23,28.
[7]戴卫力,侯浩,张晓峰.永磁同步电动机的以太网控制与人机交互设计[J].自动化技术与应用,2019,38(12):33-37,52.
猜你喜欢
科教导刊·电子版(2016年26期)2016-11-21
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年22期)2016-10-18