
一种在行同步扫描中实现多通道信号相位精确可调的方法
2020-09-10 07:22:44王春鹏
机械与电子控制工程 2020年6期


通信作者:王春鹏,1974年5月,男,汉族,广东揭阳人,现就职于广工揭阳理工学院(筹),高级工程师,学士。研究方向:机电工程技术、测控系统集成应用技术。
摘要:针对现有在行同步扫描中存在着缺陷,提出一种行同步扫描中实现多通道信号相位精确可调的方法;通过分析行同步扫描的工作原理,研究多个通道信号相位精确可调的设计方法和实现算法,使各个通道的信号在整个扫描过程中相位精确可控,以解决扫描光学系统中各数据通道间的相位误差补偿问题,提高扫描精度。结果表明:采用本方法,可以准确控制各通道的相位误差,达到精确补偿各通道的相位差的目的,相位补偿精度达到一个时钟源周期。
关键词:行扫描;F-theta扫描透镜;多通道;相位可调;同步
一、前言
行同步扫描技术应用在大多数采用光学扫描系统的设备中,如激光印像机、激光打标机、彩色打印机,其原理就是将图像拆分成由行和列的像素构成,每行提供一个同步信号作为每行输出的基准,在信号到达后按照顺序将每行的各像素逐点输出。一些扫描系统中,如激光打标机中的X方向和Y方向、彩色图像中每个像素的红、绿、蓝三个数据等,其光学角度60度以上,需要较宽的扫描幅度,同时需要处理多个数据通道。由于光学的扫描角度变化较大,而且存在多个数据通道,为了能控制好光斑在整个扫描视场内的质量[1](如光斑在视场中间和两侧的大小差异,各通道的光斑在视场的重复性等),以确保光学扫描系统的质量,需要在扫描系统中要用到一些复杂的光学系统和控制系统,以达到两个目的:一个是保证每个数据通道在成像面上的位置上重合(即通道间的相位误差)以及聚焦在成像面的焦点一致性(即光斑的畸变)。能否控制好这两个误差,是决定整个扫描系统性能的关键。许多专家和学者对这方面做了很多相关的研究,[2][3],提出一些解决的方法。
解决光斑畸变的问题一般都是用光学的技术来实现,如采用F-theta镜头等[4][5]。不同波长如RGB的激光通过F-theta镜后会产生色散,即RGB各数据通道到达焦点时会有相位上的差异,从而导致光斑不重合。解决三色光相位的同步问题,一般有两种技术,一种是单独用光学系统来实现,这种光学系统由于要同时满足两种误差要求,所以设计非常复杂,实现起来也很麻烦,而且在应用过程中很难调测,需要不断地调整和匹配各种零部件,实用性较低,目前已经很少使用;另一种是通过电子控制系统分别控制各个数据输出的时机来实现。这种技术的光学系统相对简单,而且通过电子控制系统的控制,能达到较高的精度,有较高的实用性,是目前比较常用的方法[6]。
而目前电子控制系统补偿相位误差的一般做法是对不同的通道采用不同的时钟,时钟的频率根据所需要控制的误差来计算得出。这种方案的问题主要是相位控制的精度不高,一致性差,操作也不方便。相位误差是由于不同光源在光学扫描系统中特性不同引起的,而光学扫描系统是由多个光学部件组成的,实际的误差和理论存在一定差异;而且不同批次加工的光学零部件特性也存在差异,补偿的精度取决于所选择的晶体频率精度(各通道间频率相差万分之几)。光学系统实际误差和理论误差的差异等多种因素,很难做到精确补偿,也无法控制误差的一致性,实际应用过程中需要根据不同的扫描镜头调整时钟频率,操作十分不便。
针对现有在行同步扫描中存在的缺陷,提出一种可以对多个通道信号的相位精确可调方法,使各个通道的信号在整个扫描过程中相位精确可控,以解决扫描光学系统中各数据通道间的相位误差补偿问题,提高扫描精度。
二、工作原理
激光扫描系统是将时间信息转变为可记录的空间信息的一种系统。它使某种信息通过光调制器对激光进行调制后,经光束扫描器和F-theta镜头在接收器上成一维或二维扫描图像[7]。
大多数光学扫描系统的设备中多采用行同步扫描技术,将图像拆分成由行和列的像素构成,每行提供一个同步信号作为每行输出的基準,在信号到达后按照顺序将每行的各像素逐点输出。通过控制系统来解决相位重合问题。原理是根据扫描系统中扫描反射镜匀速摆动的特点,通过控制不同通道输出的时间差来达到相位误差的目的。
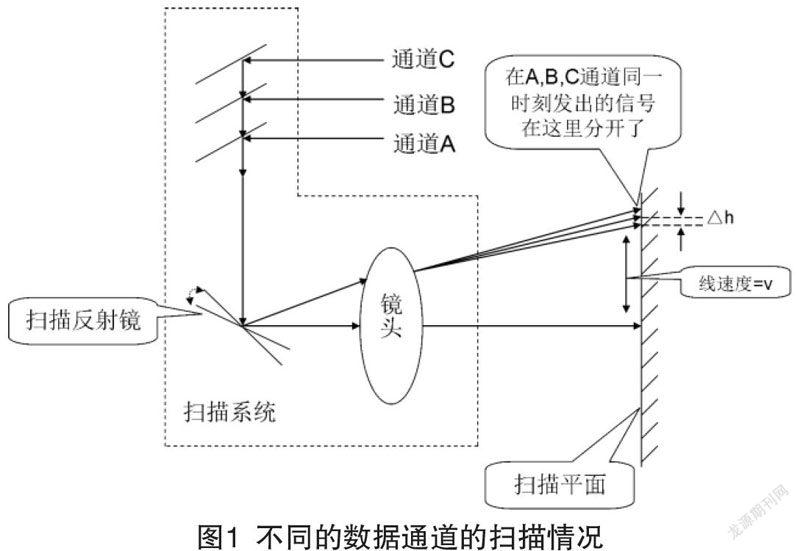
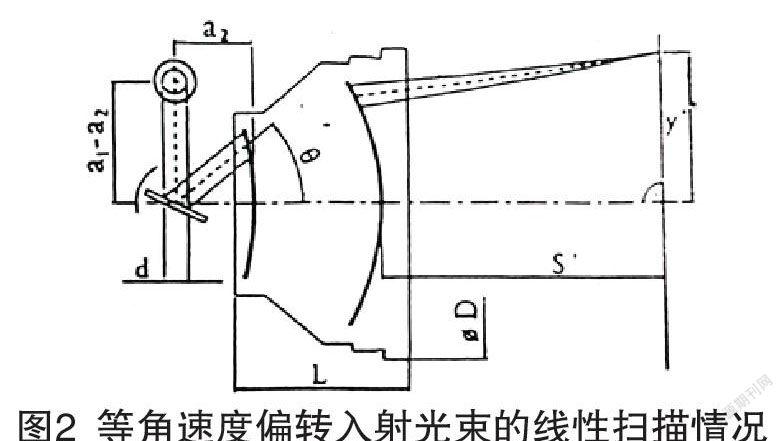
图1给出了不同的数据通道的扫描情况,数据通道(A,B,C)通过光学系统在空间上重合在一起,进入扫描反射镜,经过F-theta镜头,(一种能够实现等速扫描的聚焦透镜,即对等角速度偏转的入射光束在焦平面上实现线性扫描)线性成像,其像高y = f(θ)(像高y、入射角度θ),如图2所示。从而实现在扫描视场范围内匀速扫描。由于不同波长的光源经过聚焦镜头后会有不同的折射,而产生各数据通道的光源往往是不同的,因此空间上重合的多个通道数据在经过聚焦镜头后会产生误差,而且误差随入射角度的增大而增大。如图1所示,假设扫描线速度为v,通道A和B同时发出的数据,在进入扫描反射镜前空间位置是重合的,经过聚焦镜头后就会在扫描平面的扫描方向上产生一个Δh的位置误差,由于扫描反射镜是以v在扫描方向上匀速扫描的,所以这个误差就相当于A和B之间有一个相位误差Δt(Δt = Δh/v),即相当于B通道只要推迟Δt的时间发出数据,就可以保证和A通道的数据重合在扫描平面上的同一个扫描点上,从而补偿了聚焦镜头产生的相位误差[8]。控制系统就是按照上述的原理来进行相位补偿,从而解决相位重合的问题。某个通道B在扫描视场上相对另一个通道A产生的相位误差可以转换成相对通道A的相对输出时间差Δt,通过控制B输出的时间和A相差Δt,保证同个像素的不同通道(A和B)经过扫描系统后最终能在扫描平面上重合,达到补偿相位误差的目的。
三、设计方法和实现算法
(一)设计方法
扫描系统是将时间信息转变为可记录的空间信息的一种系统。在行同步扫描中,设计一种可以对多个通道信号的相位精确可调的方法,使各个通道的信号在整个扫描过程中相位精确可控,以解决扫描光学系统中各数据通道间的相位误差补偿问题,提高扫描精度。具体设计方法如下:
1. 选取一个时钟源f,时钟周期t = 1/f,要求f相对单个像素周期T要有足够高的倍数,以保证相位调整的精度。
2. 根据扫描系统扫描一行数据所需的时间(Tsync)和每行曝光像素的点数(M),计算出曝光单个像素周期T(T = Tsync/M),这个T要求是t的整数倍,即T = N*t,N为整数。如果不是整倍数,则通过微调扫描系统的行扫描速度v来改变Tsync以满足要求,因为扫描系统的扫描速度是连续可调的,所以可以很容易达到这个调整目标。
3. 以实际相位最快的通道作为基准通道,其相位提前其他通道,设为通道A。(同理,也可以相位最慢的通道作为基准通道)如经过F-theta镜后在扫描平面产生分离的点,离光轴最近的那个点对应的通道所需的频率作为基准通道A。
4. 对于通道A,其曝光单个像素的周期Ta在扫描过程中是不变的,即Ta = T,扫描一行数据所需的时间Tsynca = Tsync = M*T。
5. 对于其他通道,如通道B,其曝光单个像素的周期Tb在扫描过程中是变化的,其变化的规律和扫描的位置相关。
假设B相对A的相位差在当前的扫描速度v下转换成时间差为Δt,则要补偿B相对A的相位差,必须要求B在每行的扫描过程中比A快Δt个时间片,即B扫描一行数据所需的时间Tsyncb = Tsynca-Δt。计算K = Δt/t,Int = M*t/Δt,K、Int均取整数。设k为像素点在每行中的位置,即k = 1~M,则Tb的值根据k的情况分别赋予:
(1)当k等于Int的整数倍时(即k = Int*n,n为整数,n = 1~K),Tb = T-t;
(2)当k不等于Int的整数倍时,Tb = T。
6. 根据5所述,B扫描一行数据所需的时间Tsyncb = (T-t)*K +(M-K)*T = M *T-K*t,因为Tsynca = M*T,Δt = K*t,所以Tsyncb = Tsynca-Δt,这样使通道B的相位在每行的扫描过程中提前了K*t个时间片,由于本来B的相位落后A,Δt=K*t,经过补偿,B和A的相位就相同了,从而达到补偿相位差的目的。
7. 用此补偿方法分别应用到其他非基准通道中,根据不同通道的情况,就能达到每个通道信号相位都精确可调的目的。
8. 本设计方法采用数字化的补偿方式,只需通过设置不同的参数值Int,就能精确调整相位补偿的量,只要时钟的精度足够高,就能达到预期的补偿精确度。操作十分方便。
(二)实现算法
实现行同步扫描中多通道信号相位精确可调的方法采用三个流程来完成。整体图像输出工作流程、正常无需进行补偿扫描流程和补偿通道扫描流程(需要进行补偿)。
设每行曝光像素的点数为M,时钟周期为t,则单个像素周期时间T = N*t,行扫描周期信号Sync,当前扫描的像素位置计数器为k,对应通道中,每行扫描需要补偿的时钟周期数为K,每行数据中需要进行补偿的像素间隔为Int,当行扫描周期信号有效时,开始进行扫描处理。按照k = 1~M的过程逐个将数据输出,在进行多通道信号相位精确调整时,采用数字化的方式进行补偿调整。
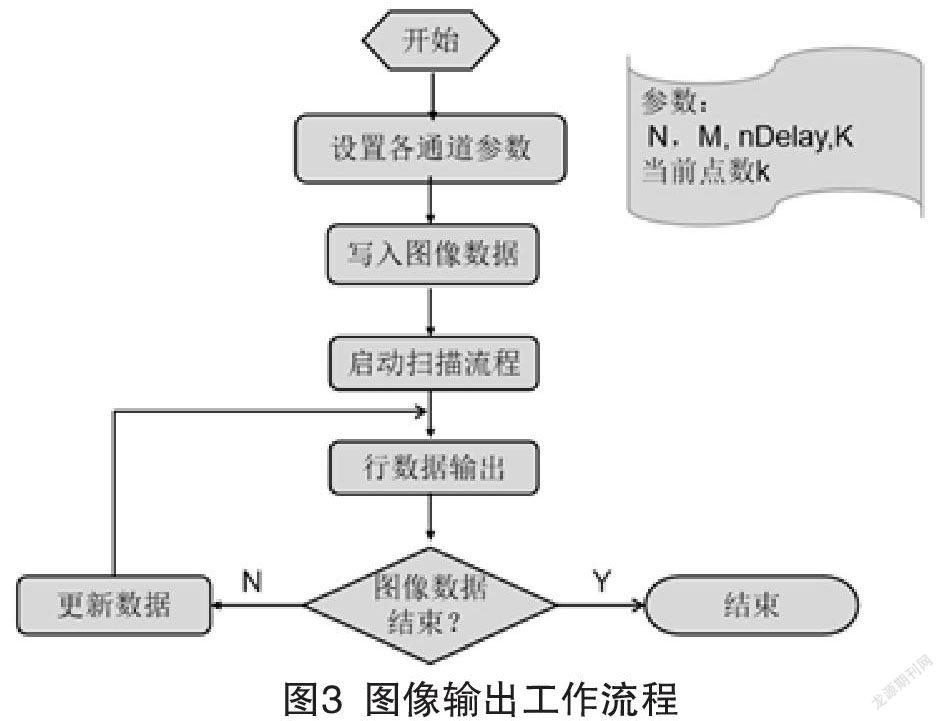
1 图像输出工作流程
如图3所示,设置各通道参数,写入图像数据,行同步扫描中,当行扫描周期信号有效时,开始进行扫描处理。这时流程按照k = 1~M的过程逐个将数据输出,在进行多通道信号相位精确调整时,采用数字化的方式进行补偿调整,其中“第k个点输出”过程按照两种情况进行执行:
(1)正常无需进行补偿情况,具体见流程2;
(2)需进行补偿情况,具体见流程3。
2 正常无需进行补偿情况
正常无需进行补偿情况,如果该通道是基准通道A,或者其他需补偿的非基准通道,如通道B,而且当前扫描的“第k個点输出”位置k不等于Int*n(n为整数),则无需进行补偿,如图4所示。
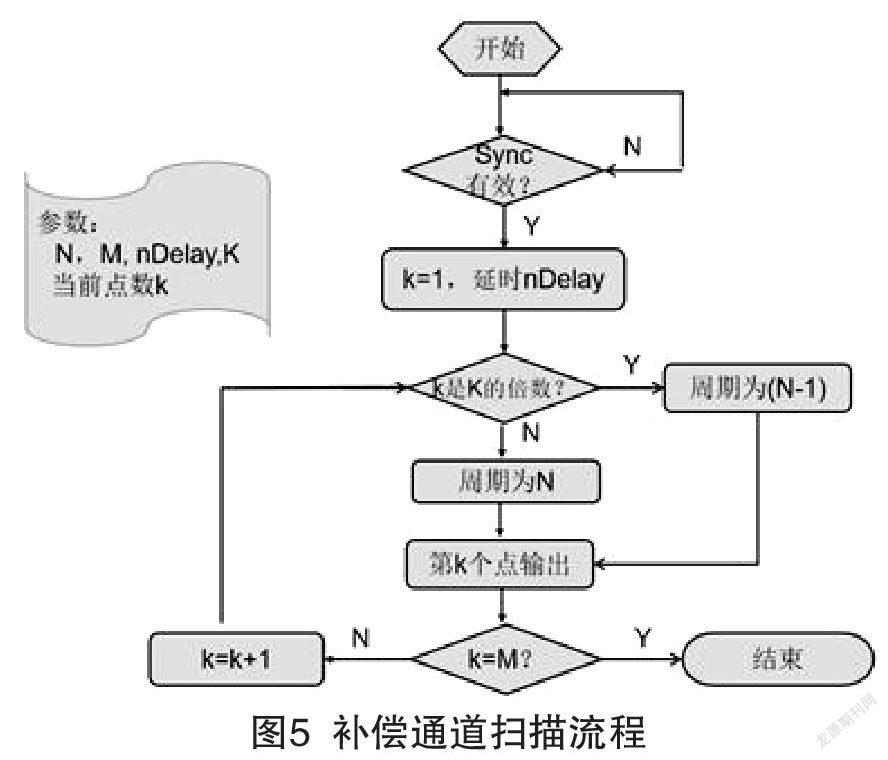
3 需进行补偿的情况流程
当该通道是非基准通道(如通道B),而且当前扫描的“第k个点输出”像素点位置k = Int*n(n为整数),则需要进行补偿,具体流程如图5。
在质量较高的扫描系统,扫描系统要求在扫描平面内的相位误差控制在1/10光斑直径以内,采用本方法可以很容易的将通道的相位误差补偿到1/20个光斑直径以内,误差控制的精度高,实际操作和维护也十分便利。
由于采用数字化的方式补偿,因此存在离散、采样等误差。根据激光印相机实际应用的需求,当两种不同的光斑中心分离小于其直径的1/10时,对图片的清晰度和锐度等关键性能质量指标不会产生任何影响,也就是说只要能保证光斑分离在1/10光斑以内,就能非常完美的达到补偿要求。所以只要使用的时钟源的时钟周期t小于曝光单个像素周期T的1/20,即可满足需求。本方法不局限于此应用,其他应用需求同样可根据实际需要采用不同的时钟频率。所以采用本方法可以很容易的将垂轴误差控制在1/20个光斑直径以内,满足1/10光斑直径的精度要求。同时,由于只要计算改变Int参数,就能很容易的改变补偿垂轴色差的范围,可以很容易的适应不同的通道以及不同的F-theta镜头。
四、应用测试
行同步扫描技术应用在大多数采用光学扫描系统的设备中,通过采用一种可以对多个通道信号的相位精确可调的方法,使得各个通道的信号在整个扫描过程中相位精确可控,以解决扫描光学系统中各数据通道间的相位误差补偿问题,达到提高扫描精度的目的。
在一些图像输出质量较高的扫描系统,如宽幅的彩色激光印像机中,幅宽30 in、40 in甚至50 in,分辨率要求300 dpi以上,扫描系统要求在扫描平面内的相位误差控制在1/10光斑直径以内,采用本方法可以很容易的将通道的相位误差补偿到1/20个光斑直径以内,误差控制的精度高,实际操作和维护也十分便利。
以激光印相机实际应用中的“40 in激光相片输出系统”为例。如图6所示。
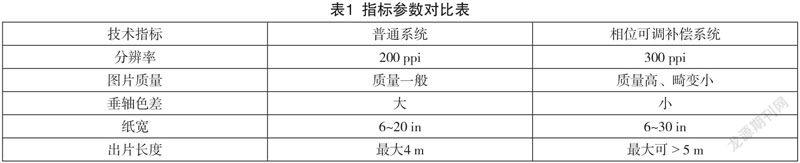
该激光印相机使用高精度检流式振镜及激光扫描系统,采用功率高稳定度红、绿、蓝激光器组(包括光束整形系统)及其控制装置,配用成像质量优良的F-theta镜头和具有较高光强调制速率的数字AO控制器,采用光、电控制相结合的技术,有效的消除了垂轴色差。系统应用行同步扫描中实现多通道信号相位精确可调这个技术。图片的合光线从左到右的重合度都很高,各条合光线都很细实,非常清晰,输出与其他图片对比,图片细节表现很好,图像质量得到很大提升。实际分辨率高,色域宽,垂轴色差小,畸变小,重复度高,超长出片长度,超宽幅视场,成像质量高。具体详见表1。
测试结果表明:通过此方法能准确控制各通道的相位误差,精确补偿各通道的相位差,相位补偿精度达到一个时钟源周期。
五、结论
本文通过使用一种在行同步扫描中实现多通道信号相位精确可调的方法,可以准确控制各通道的相位误差,达到精确补偿各通道的相位差的目的,相位补偿精度达到一个时钟源周期。同时由于采用数字的方式,补偿量是通过参数来设置的,可以很方便的适应实际使用过程中产生的各种不同的误差情况,对批量生产和维护起到很好的作用。
参考文献:
[1]付敏敏,陳培锋,等.超广角大工作面f-theta镜头的光学设计[J].应用光学, 2011,32(06):1083-1087.
[2]周燕,沈涛.多波长广角f-theta透镜光学设计[J].应用光学, 2017,38(04):533-537.
[3]John Wallace.F-theta lenses keep laser-scanning nice and linear[J].Laser Focus World, 2020,56(3).
[4]张双翼,徐熙平.激光扫描系统中f-θ透镜的光学设计[J].光学仪器, 2012,34(05):40-44.
[5]朱瑶,王治乐,贺磊,陆敏.F-Theta光学镜头的畸变标定及测角精度分析[J].红外, 2017,38(11):5-10.
[6]刘志合.电子补偿式扫描装置[P]. 广东:CN2890971, 2007-04-18.
[7]赵鑫.YAG激光打标机f-theta透镜的光学设计[J].无线互联科技, 2016(07):63-64.
[8]黄跃.多通道信号采集传输系统的研究与设计[D].南京航空航天大学, 2018.
广工揭阳理工学院(筹),广东 515200
猜你喜欢
中外医疗(2017年1期)2017-03-20 08:24:52
教学与管理(中学版)(2016年12期)2017-01-07 09:52:32
中国科技纵横(2016年15期)2016-12-27 19:06:52
商情(2016年42期)2016-12-23 14:26:58
美与时代·城市版(2016年8期)2016-11-10 01:02:17
电脑知识与技术(2016年21期)2016-10-18 23:21:16
中国科技博览(2016年12期)2016-05-09 03:53:41
中国科技博览(2016年5期)2016-04-23 11:10:24
科技资讯(2015年2期)2016-02-29 17:18:46
哈尔滨理工大学学报(2015年3期)2015-09-21 18:08:25
