气动机械手控制系统设计分析与研究
2020-09-10 01:23:46邓瑜张闯开
内燃机与配件 2020年8期
邓瑜 张闯开
摘要:机械手装置控制系统的设计是整个机械手设计的关键点和基本要素。其结构和功能上的合理性的设计对于提高机器人的可靠性和实用性具有重要意义,目前,机械手广泛采用气动驱动的PLC控制方法[1]。
关键词:机械手;控制系统;PLC
0 引言
随着现代化的飞速发展,作为自动化设备必不可少的工具,机械手设备已迅速并广泛用于工业生产中。它可以在没有不可持续的人工环境的情况下实现生产的自动化和智能化,移动货物,搬运货物,取代繁重和单调的人类劳动,机械手装置采用气动驱动,结构简单且设计方便。越来越广泛地被高端智能企业使用和研究。
1 机械手控制系统的组成结构
为了使机械手更协调,动作更顺畅,因此使用PLC编程来加以控制机械手装置的运动。机械手按照程序指令进行动作运行,机械手控制系统的主要目标是按指示操作。它还包括性能好的计算机、系统设备和控制软件。它可以划分为四个部分:机械手设备及其传感设备,工作环境,工作任务和控制器。机械手是由各种机制组成的特定设备。它一般在感知器内部装有各种多样传感器;工作环境是指机械手工作的周围环境以及机械手传感器设备的工作状态;任务是由机械手进行操作的内容,通常以程序指令方式或文本,图形或声音输入;控制器包括与操纵器等效的软件和硬件,是设备的大脑中枢,通过计算机或设定执行程序的特定控制器来执行给定任务。
2 气动机械手系统控制要求
机械手的工作步骤是:将特定工件从空间位置1平稳地转移到空间位置2。机械原点设置在恢复位置的左上角,机器人设备的抓握部分处于松弛状态,并且左限位开关和上限开关同时打开;上升,下降和左右移动均由PLC编程指令自动执行。同时,气动驱动器提供动能以完成工作。设计PLC程序的工作是点动、单周循环、自动循环和步进,4种方式[2]。机械手的基本动作周期的简化顺序是启动→原点-上升-前伸-下降-夹紧-上升-顺时针旋转-下降-解除-后退-顺时针旋转-原点。
3 气动系统设计方案
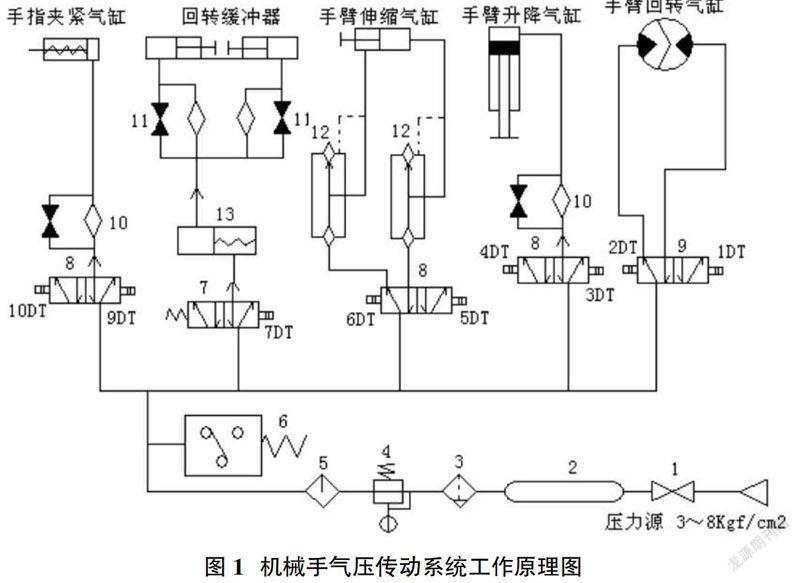
图1显示了该机械手的气动传输系统的工作原理。它的气源通过快速更换接头从空气压缩机进入空气储罐(压力约为4~10Kgf/cm4),然后通过水过滤器、压力阀、石油气溶胶等进入平行道路的电磁阀。控制缸体和机械师的手工操作的功能。
4 PLC选型
本设计选择了三菱公司生成的GX2-Developer编程软件,目前在自动化器件中使用比较广泛的PLC编程软件之一。它包括一个LLT仿真软件,用户可以在个人计算器上仿真PLC的操作,从而大大减少了测试时间。它可以对大部分三菱公司出产的PLC进行编程,包括A、Q和FX等系列三菱PLC。通常,根据先前确定的PLC参数以及PLC的价格,性能和实际情况选择PLC模型。
5 气动机械手控制系统的软件设计
5.1 总体程序结构
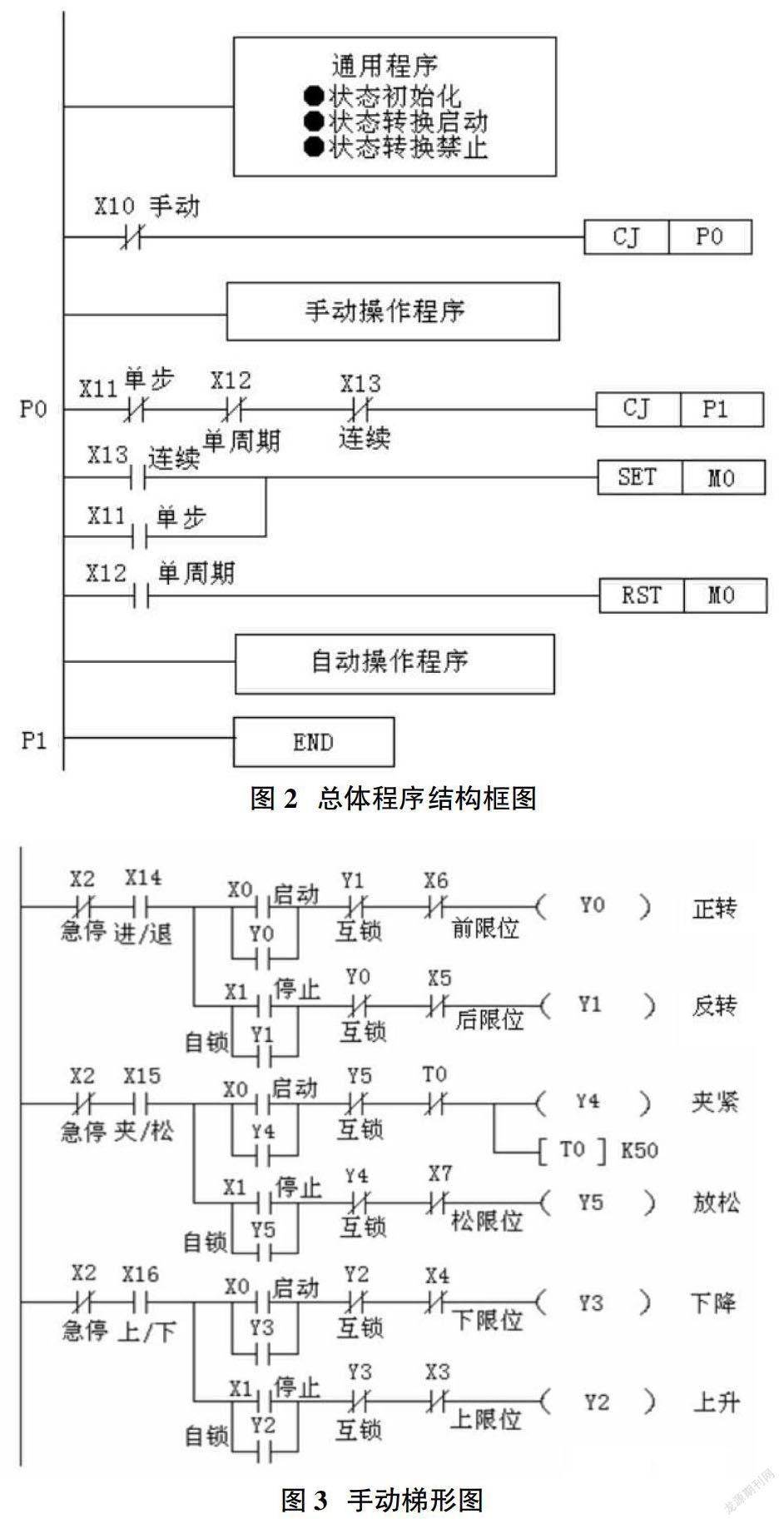
气动机械手控制系统具有两种操作方式,一种是自动操作,另一种是人工操作。这两种情况可以通过跳转指令来区分。总体程序结构框图如图2所示[3]。由于跳转指令是由手动程序和自动程序使用的,所以这两种程序可以使用相同的输出端口[2,3]。
5.2 手动操作程序设计
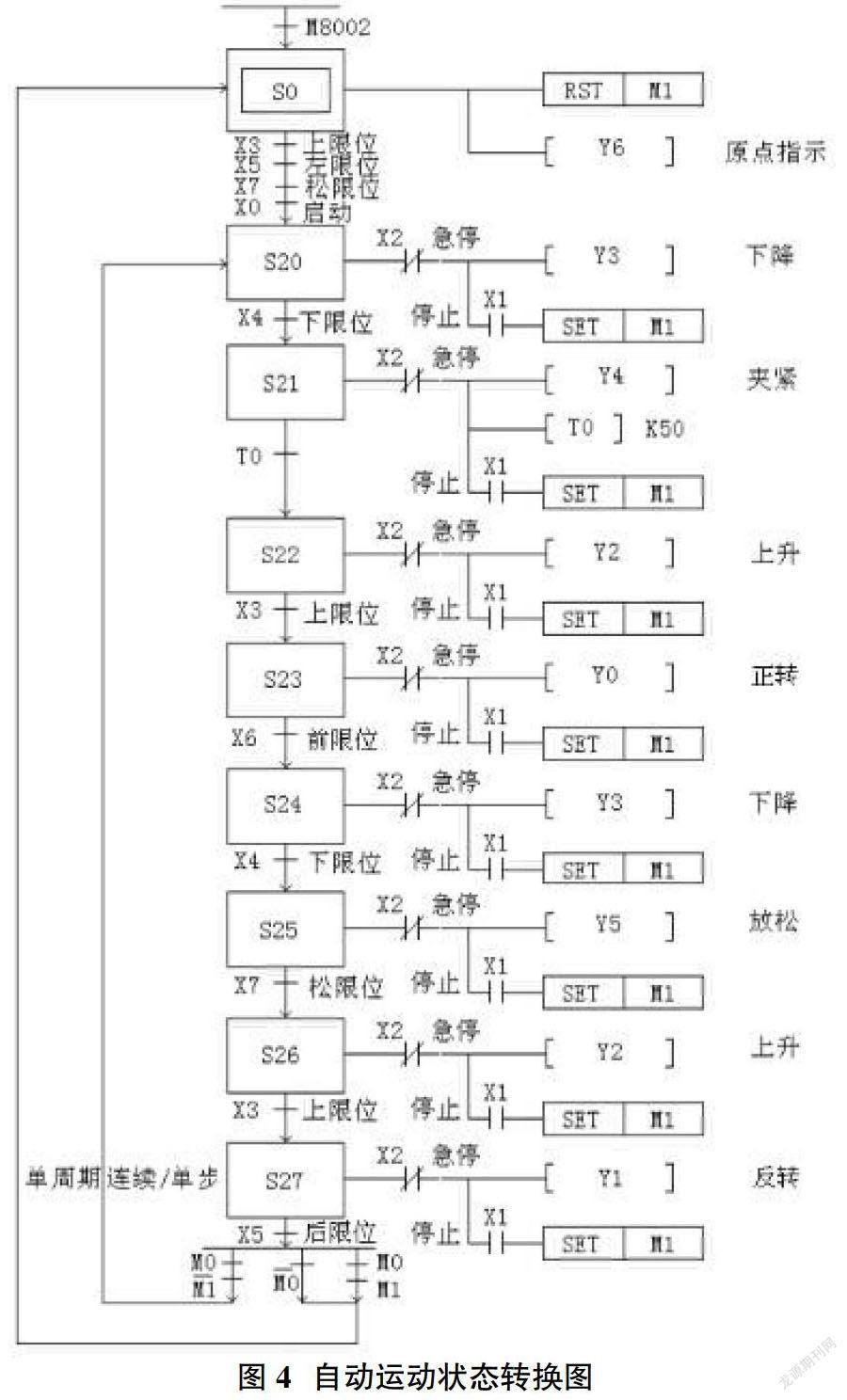
在手动操作模式下,程序不易出错,因此会针对每个动作分别执行程序,并在每个步骤之后停止并等待下一次手动操作。按下按钮键即可执行很多种动作。该控制程序可以分别单独孤立设计,并且可以独立于正在运行的操作程序,而不会干扰自动操作程序。手动操作控制相对简单,易懂,控制面板易于掌握和操作。同时,根据常规继电器件控制电路很容易进行设计。其梯形图如图3所示。
将动作选择开关设为“进/退”时,X014变为ON,若机械手装置成为上限位置,则按下开始按钮手开始前进,按下停止按钮手向左移动。执行的是Y00和Y01的顺时针转和逆时针转。如果将动作选择开关设定为“夹松”,按下开始按钮后夹持动作开始,按下停止按钮后放松动作开始。Y04和Y05的夹紧动作和放松动作被执行。将动作选择开关设定为“上/下”后,按开始按钮开始降落,按停止按钮开始上升,执行Y03和Y02的下降和上升两个步骤。
5.3 自动操作程序设计
当机械手装置到达其起始点时,按下启动按钮并连接S020,其联络点连接Y03并执行着陆程序。当按下一级开关时,X04连接到下一个状态,S021,然后转向下一个动作;当机械手挤压工作时,计时器会关闭,计时器的永久接触会关闭,连接到S022,恢复正常;当触碰最高限量开关时,X03将被连接起来,而通常的輸入继电器孔径将被关闭,连接到下一个状态,S03,机械手前进;现在右转,当触碰右边边界的开关,X06连接,关闭正常的继电器开启,连接下一个状态,S04,机械手开始降落;当触碰较低级别的开关时,X04将被连接起来,通常的继电器孔径将被关闭,连接到下一个S25状态,机械手将被释放;当机械手完全松开并出现在浮控开关中时,X07将被连接起来,继电器的永久输入触点将被关闭,连接到下一个状态,S26,机械手将被恢复;当最高限量开关再次触动时,X03将被连接起来,输入继电器的正常孔径关闭,连接到下一个状态,S027,机械手后退;当左限开关触动时,X05连接,正常的继电器孔径关闭,连接到下一个S20状态,机械手重复上一个周期的操作。图4是自动运动状态转换图。
6 总结
机械手控制系统是机械手装置设计中的一个非常重要的环节,其中包括一个可编程控制器(PLC),其核心是一个中央处理器,将计算机和自动控制等先进技术结合起来,具有很高的可靠性和灵活性,功能充实。这对机械手的柔软性和工作效率很重要。
参考文献:
[1]勒大为.轮式物料搬运机器人系统开发研究[D].北京:北京交通大学,2005.
[2]郑长山.基于PLC和WinCC的机械手监控系统设计[J].重庆:重庆电力高等专科学校学报,2013.
[3]张晓东.基片分类机器人控制系统[D].山西:太原理工大学,2014.
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26 09:39:12
科教导刊·电子版(2016年26期)2016-11-21 09:41:18
电子技术与软件工程(2016年18期)2016-11-14 02:18:06
数字技术与应用(2016年9期)2016-11-09 22:11:46
中国科技博览(2016年19期)2016-10-19 13:27:34
通信电源技术(2016年1期)2016-04-16 04:57:29
机电信息(2015年3期)2015-02-27 15:54:53
河南科技(2014年11期)2014-02-27 14:17:10