高分七号相机遮光罩展开状态红外感知系统
2020-09-05 03:44刘靖雷江长虹
光谱学与光谱分析 2020年9期
刘靖雷, 冯 昊, 曹 旭, 江长虹, 贾 贺, 张 章
1. 北京空间机电研究所, 北京 100191 2. 中国空间技术研究院航天器无损着陆技术核心专业实验室, 北京 100191
引 言
高分辨率对地观测系统重大专项是《国家中长期科学和技术发展规划纲要(2006—2020)》确定的16个重大科技专项之一, 目前已经形成了空间信息产业链, 使我国对地观测系统达到了世界先进水平。 高分七号卫星工程作为高分工程天基观测系统的收官之星, 将在高分辨率立体测绘图像数据处理、 高分辨率立体测图、 城乡建设高精度卫星遥感和遥感统计调查等领域取得突破[1]。
高分七号卫星搭载的主载荷双线阵相机由前后视相机组成, 两台相机成一定夹角安装在卫星上, 从不同角度对地面成像, 从而获得立体影像及高程数据。 由于该相机的特殊结构及轨道工况设计, 需要较传统遥感相机更长的遮光罩以满足在极端工况下避免太阳光直射导致温度稳定性无法满足要求的问题[2]。
目前, 针对空间相机遮光罩应用, 主要分为固定式遮光罩系统以及可展开遮光罩系统。 可展开遮光罩主要包含圆柱(锥)状遮光罩以及开放式平面遮光罩。 在高分七号相机设计过程中, 为解决发射环节运载包络尺寸约束问题, 设计了柔性遮光罩系统, 其由六根610 mm长度的“豆荚杆”式支撑结构以及蒙皮组成了遮光罩本体[3]。 在发射状态, 遮光罩的几片组件呈收拢状态, 当发射入轨后, 由地面控制解锁, 在“豆荚杆”式支撑结构弹性力的作用下, 遮光罩组件伸展到位, 并组成了遮光系统。 柔性遮光罩系统较传统刚性遮光罩系统需要对在轨工作状态进行实时监测, 用以地面判断遮光罩系统的在轨状态, 对数据进行处理。
1 遮光罩展开状态红外感知系统设计
1.1 展开状态感知设计需求
适用于高分七号遮光罩的展开状态感知系统的设计需求如下:
(1)展开状态感知系统必须尽可能对现有遮光罩系统不产生负影响, 重量轻, 结构小巧且能够适应航天器无温控等的环境要求[4]。
(2)展开状态感知系统尽可能选择代价较小的方案, 功率消耗尽可能小于1 W, 对于下行数据遥测带宽要求低, 避免大数据量传输[5]。
(3)展开状态感知系统尽可能使用非活动结构与部件, 避免因为发射阶段巨大的加速度及振动环境带来结构冲击。
(4)展开状态感知系统作为在空间应用的舱外设备, 需要经受得住空间环境应力的作用, 特别是严苛的温度交变应力的作用, 根据高分七号的仿真分析结果, 在轨温度范围可达-80~125 ℃。
常规的展开状态感知手段包括采用小型相机监视、 接近(到位)开关、 霍尔传感器以及电机自到位判断等方式[6]。 小型相机监视遮光罩状态需要较高的成本且占用较多的通讯带宽; 接近(到位)开关测距方式适用于刚性结构展开系统; 霍尔传感器以及电机自到位判断等方式适用于依靠电机驱动的刚性展开系统。 根据如上约束, 本文描述的是一种基于近红外(NIR)光学探测的展开状态监测系统。 其结构框图如图1所示。 工作原理为: 红外光线产生系统安装于“豆荚杆”系统的一端, 通过产生一定波长的红外光学信号, 经过“豆荚杆”装置内部空间直射、 漫散射而被安装于另一端的红外光线接收系统采集, 采集到的红外光线被转换为电流信号, 经过上拉电阻转换为电压信号输出用于遮光罩展开状态判断。
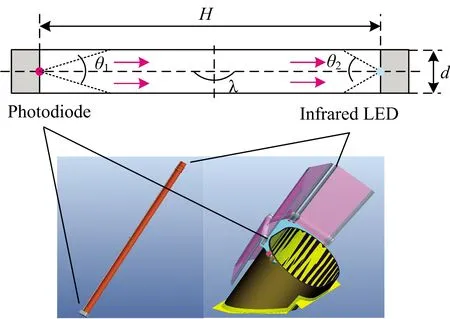
图1 展开状态红外感知系统
该红外感知系统的优点是能够经受住较为严苛的环境而几乎不增加原有遮光罩系统的代价。 通过调节红外光线产生系统光功率参数与接收系统的电路放大参数可以设置展开监测系统的工作点, 进而将工作点平移至温度影响较小区间范围内, 消除对大动态温度交变等敏感因素的影响[6]。
1.2 系统模型与设计
展开状态红外感知系统的工作原理是: 红外光线产生系统产生红外光线, 在“豆荚杆”中间的空间通道内经过直射与漫散射, 进入到红外光线接收系统, 经过放大电路转换为电压信号。
如图1所示, 红外光线产生系统发出的红外光线经过“豆荚杆”通道后进入接收系统的视场范围, 光线产生系统与接收系统的视场交集可以进行微元表示, 在一定的豆荚杆直线度范围下, 输出电压信号可以由如式(1)表示
(1)
其中,V1为基准偏置电压值,I0为红外光线产生系统输出光功率,ρ是“豆荚杆”用铍青铜材料的表面反照率,H为光线产生系统与接收系统之间的距离,θ1与θ2分别为光线产生系统与接收系统的视场角,S0为“豆荚杆”截平面的物理参数,λ为豆荚杆展开后的直线度,η为接收系统的光电转换效率,R0为接收系统上拉电阻对电流的放大参数。 dΩ1为微元对红外光线产生系统的接收度, dΩ2为接收系统对微元发射光的接收度, 积分针对红外光线产生系统与接收系统的视场交集进行。 由式(1)可以得出, 当展开状态红外感知系统所安装的截面积、 距离等参数固定时, 接收系统的输出电压与红外光线产生系统的光功率、 接收系统的上拉电阻有关。
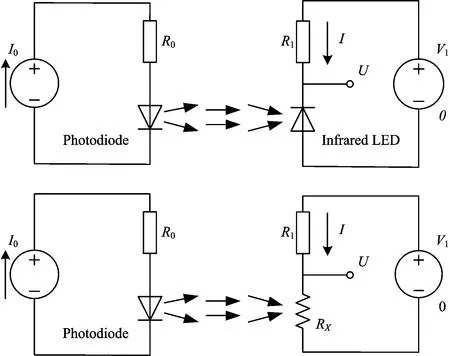
图2 光电接收系统等效原理图
对于接收系统的光电三极管电路, 如图2所示, 可以将光电三极管等效为受控电阻Rx, 则有
U=V1-IRx
(2)
其中电流I为接收回路中等效电流, 在折叠状态时, 电流I的值与光电三极管的漏电流有关, 由于漏电流值在nA级, 尽管Rx阻值设计为数十kΩ量级, 但是输出电压U的值仍为高电压状态。 在光照状态时,Rx阻值迅速降低至kΩ量级, 电流I迅速增大, 输出电压U值由高压变化至低压状态。
由于遮光罩“豆荚杆”系统原理, 其工作中只有两种状态: 展开(λ=180°)与折叠(λ=0°)。 在折叠状态下, 接收系统等效为零光功率接收。 在展开状态下, 接收系统的输出电压值与红外光线产生系统的光功率与接收系统的电路放大参数有关, 同时温度的变化对电子元器件的工作特性会产生影响。
如式(2)所示, 在宽温度交变环境下, 红外感知系统的展开态正确信号取决于展开状态下的接收系统光电流Iλ0; 在折叠状态下, 影响感知系统是否输出正确信号的影响因素主要有接收系统上拉电阻Rx、 接收系统暗电流Iλ180。 记系统的判别门限电压分别为UOH,UOL, 则分别需要满足式(3)条件
(3)
1.3 参数设计
根据已知参数包络及整星电子学设计状态, 展开状态红外感知系统的光线产生系统与接收系统之间的距离H、 红外光线产生系统与接收系统的视场角θ1与θ2、 “豆荚杆”截平面的物理参数S0、 接收系统的光电转换效率η均为已知固定量。
根据机械设计, 遮光罩在轨有展开与折叠两种理想状态, 两种理想状态下,λ分别按照0°与180°计算, 对于调节量, 红外光线产生系统输出光功率I0以及接收系统上拉电阻对电流的放大参数R0为电子学系统可调设计变化量, 交变温度环境为外部随机干扰参量。
采用美国OPTEK公司的高性能胶囊式封装的OP224组成红外发射系统阵列, 采用OP604光电接收二极管组成红外接收系统阵列, 光学系统工作波长为890 nm。 根据功率包络, 首先确定发射阵列电流参数值约为50 mA, 接收阵列放大参数匹配电阻值为25 kΩ左右, 构建试验系统。
2 试验验证
由理论分析可知, 影响红外监测系统输出准确性的因素主要有红外光线产生系统的输出光功率、 红外光线接收系统的电路放大参数以及外部温度环境。 而接收系统的电路放大参数值越大, 红外监测系统的灵敏度越高, 但是在零光功率的状态下, 接收系统的电路放大参数如果越大, 漏电流产生的影响会加大。 另一方面在电子学设计上, 接收系统的电路放大参数值会影响系统对外的输出阻抗, 存在与外接电路的阻抗匹配性设计问题, 所以放电电路的参数需要取平衡值。
2.1 零功率状态接收系统放大参数影响试验
根据电路参数设计原理, 接收系统的放大特性与接收电路的上拉电阻阻值成正比, 接收系统的放大特性可以用上拉电阻阻值表示。 分别测试了在零发射功率状态下, 接收系统的上拉电阻由1 kΩ, 2~20 kΩ(步进值2 kΩ)、 30~100 kΩ(步进值10 kΩ)状态下的电压输出值。 如图3所示。
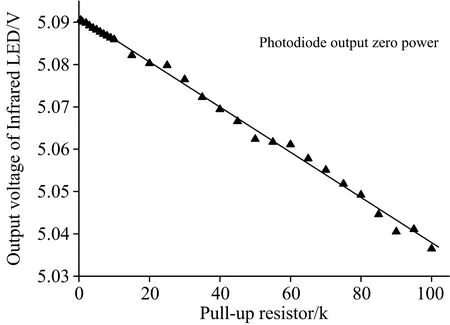
图3 零功率输入接收系统放大参数影响数据
由上述数据可知, 在定输入加载电压以及零功率加载环境下, 随着接收系统上拉电阻的增大, 静态输出电压呈近似线性变化, 线性变化率大约为0.5 mV·kΩ-1, 但是总体上输出电压值能够保持在5 V以上。 根据光电晶体管物理特性, 该电流是由晶体管暗电流引起, 通过计算, 光电晶体管系统的暗电流值约为500 nA。 接收阵列二极管在零功率输入条件下的等效电阻约为10 MΩ。
2.2 光线产生系统光功率与接收系统放大参数匹配试验
针对光功率与接收系统的电路放大参数两项因素, 在实验室状态下进行了两项因素的匹配试验, 由于红外光线产生系统的光功率与输入电流成正比, 所以红外光线产生系统的光功率用工作电流值表示, 接收系统的放大参数用上拉电阻的特征值表示。 设计了光电流在5~100 mA区间, 放大参数在11~100 kΩ区间的共228个工况的试验矩阵, 试验采用安捷伦公司的E3649A型电源提供电流与电压激励, 采用FLUKE公司的F289C数字万用表进行电压信号测试分析, 采用了永星电子的精密3296KX系列可调电位器改变上拉电阻值。
试验过程中, 将展开状态红外感知系统安装于遮光罩“豆荚杆”装置本体内, 通过外部控制遮光罩的展开与折叠状态, 通过仪器对展开状态红外感知系统的参数进行测试。 试验过程如图4所示。

图4 遮光罩折叠展开试验
试验得到12组共228个工况的数据如图5所示。
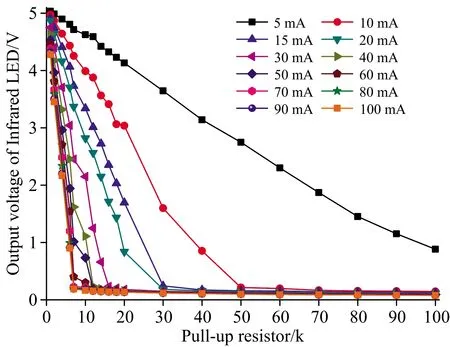
图5 匹配试验测试数据
通过试验得出, 在遮光罩处于伸展状态下, 红外光线接收系统输出的电压值和红外光线产生系统光功率值、 红外光线接收系统上拉电阻阻值均有关系。 具体为: 当红外光线产生系统发射光功率一定时, 红外光线接收系统上拉电阻的阻值越大, 红外光线接收系统输出电压值越小, 因为当红外光线产生系统发射输出光功率时, 红外光线接收系统的光电二极管阵列等效阻值开始变化, 其呈现的零功率下的高阻状态变为某种阻值的低阻状态。 为了增加系统的输出电压的分辨率, 必须增加红外光线接收系统上拉电阻的阻值。 当红外光线产生系统发射光功率的值减小至20 mA以下时, 红外光线接收系统的上拉电阻需要在30 kΩ以上才能使得展开状态红外感知系统在实验室条件下正常工作。 当红外光线产生系统光功率值减小至5 mA左右时, 系统的工作状态趋近于发射系统零功率下的状态, 即曲线开始封顶平直, 几乎不再受到红外光线接收系统上拉电阻的影响。 试验表明, 在展开状态红外感知系统参数设计上, 需要同时匹配考虑发射光功率与红外光线接收系统上拉电阻的阻值。 两者均需要在外部供电与电子学遥测采集可接收的条件下, 取较高值。
2.3 温度对展开状态红外感知系统影响试验
针对系统轨道热控数据, 设计的温度试验点分别有: -90, -60, 20, 100, 125和145 ℃六个测试状态, 分别针对零光功率(λ=0°)以及伸展状态下(λ=180°)进行性能测试。 按照飞行试验状态制备了六组相同状态制品, 六组制品的参数设定为: 红外光线产生系统光功率电流值45 mA, 接收系统上拉电阻阻值25 kΩ, 供电电压5.0 V, 得到试验数据见表1。
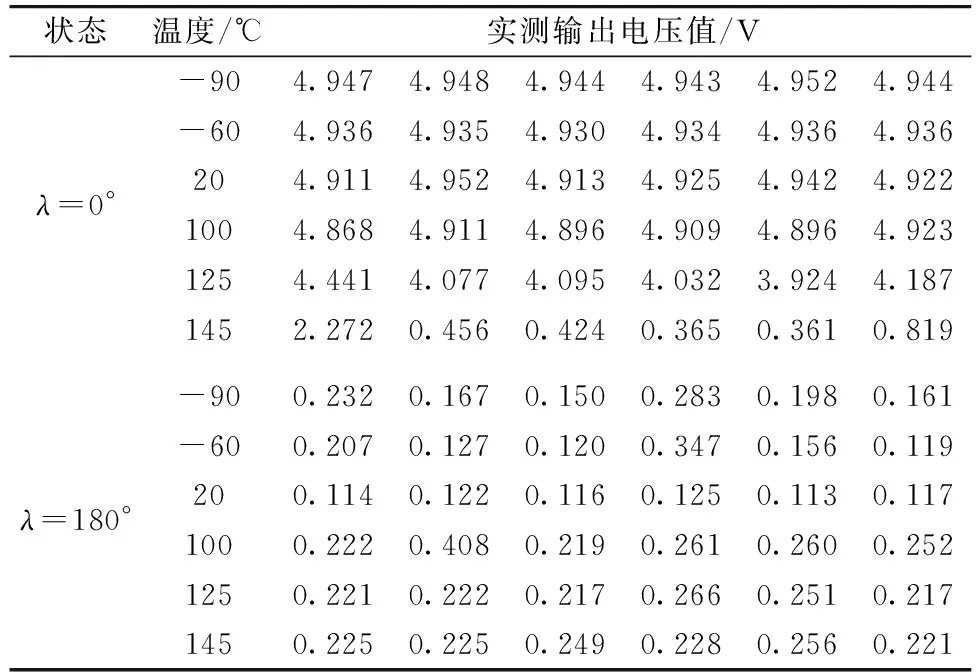
表1 温度环境下感知系统测试数据
温度条件对展开状态红外感知系统的影响试验表明, 在红外光线产生系统光功率电流值45 mA, 红外光线接收系统上拉电阻参数25 kΩ条件下, 在-90~100 ℃温度范围内, 系统能够正常的表示遮光罩的展开与折叠状态, 当温度上升至125 ℃时, 展开状态红外感知系统在伸展状态下的输出电压值开始下降, 对状态的判断开始出现偏差, 当温度上升至145 ℃时, 展开状态红外感知系统对遮光罩的状态判断会出现严重偏差。
基于上述数据, 对红外光线接收系统光电晶体管阵列的等效电阻进行了计算, 如图6所示。 计算结果表明温度下降对红外光线接收系统光电晶体管阵列的等效电阻会产生影响, 变化趋势是等效阻值增大, 但是没有产生数量级的变化。 当温度上升时, 红外光线接收系统光电晶体管阵列的等效电阻开始下降, 当温度达到100 ℃时, 等效电阻降低至常温等效电阻的1/2~1/3左右, 当温度达到125 ℃时, 光电晶体管的等效电阻已经降低至常温等效电阻的1/10左右, 温度达到145 ℃时, 光电晶体管的等效电阻下降至kΩ量级。 由于受到温度影响, 等效电阻出现较大范围下降, 所以红外光线接收系统上拉电阻的阻值宜选用在10~50 kΩ之间。
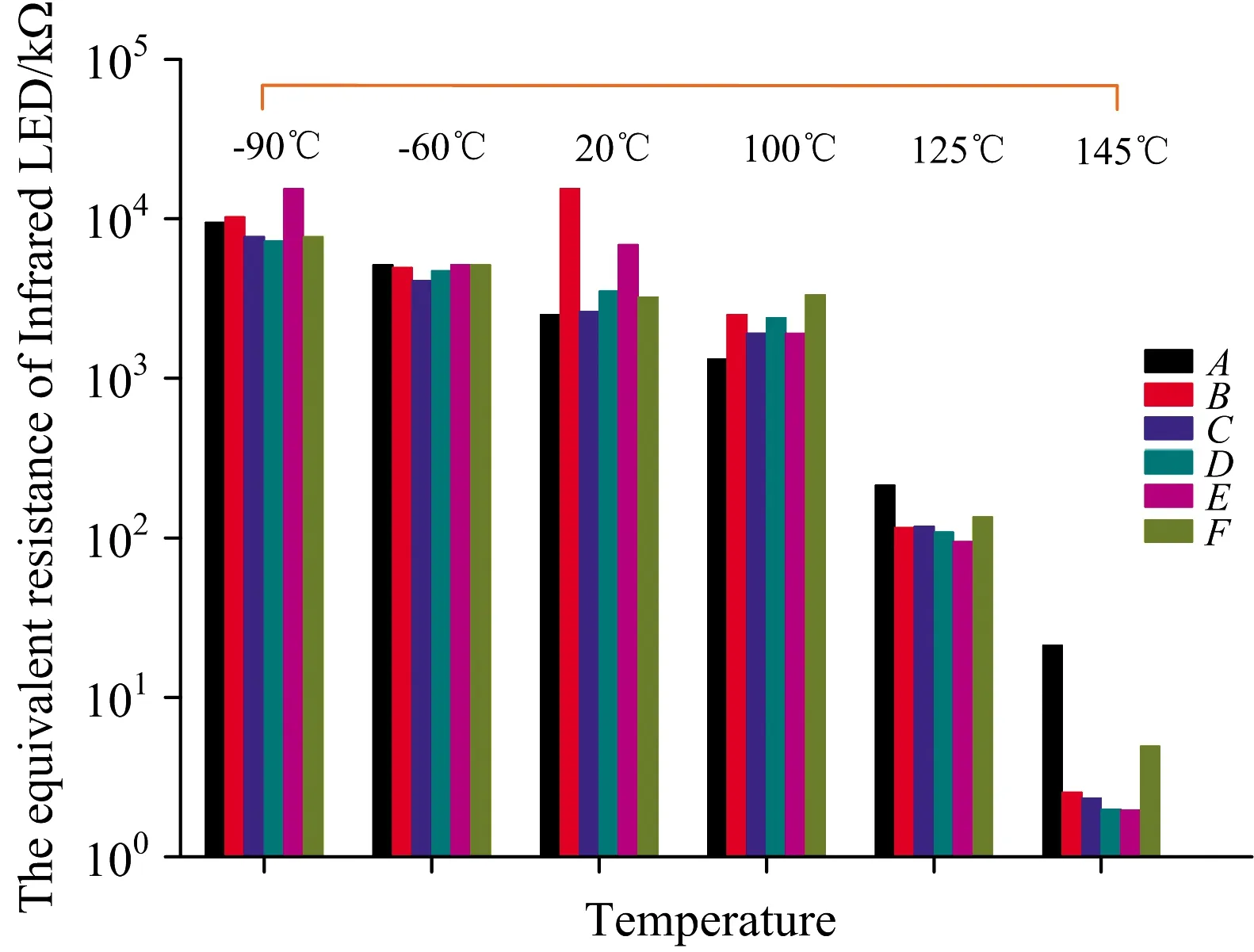
图6 温度环境下光电晶体管等效电阻
2.4 讨论与分析
影响遮光罩展开状态红外感知系统的性能因素主要有: 红外光线产生系统光功率值、 红外光线接收系统的放大参数值及工作温度。
该展开状态红外感知系统, 红外光线产生系统光功率参数大于25 mA, 红外光线接收系统上拉电阻特征参数大于15 kΩ是系统工作的理想包络。
在温度环境作用下, 当红外光线接收系统上拉电阻特征参数不大于50 kΩ时, 展开状态红外感知系统在小于125 ℃温度环境下能够有效的判定遮光罩系统的工作状态。
当遮光罩系统几何参数等变量发生变化时, 可以通过改变红外光线产生系统光功率参数、 红外光线接收系统放大参数改变系统工作点, 为后续其他该类产品在轨状态监测提供了相关参数设计方案。
3 结 论
研制了展开状态红外感知系统, 用于高分七号相机遮光罩在轨展开状态监测。 感知系统包含红外光线产生系统与接收系统, 采用890 nm红外光作为信息载体, 经空间柔性展开结构“豆荚杆”通道后由红外光线接收系统转换为电信号, 通过对电信号处理得到柔性结构展开状态信息。 具有无动作机构部件、 无大能源消耗等优点。 搭建了试验系统, 针对红外光线产生系统光功率、 红外光线接收系统光电晶体管阵列上拉电阻以及工作温度等参数对展开判定的影响, 进行了测试。 得到以现有设计包络, 即红外光线产生系统光功率参数大于25 mA、 红外光线接收系统上拉电阻大于15 kΩ是系统工作的理想包络。 在温变环境下, 红外光线接收系统上拉电阻特征参数不大于50 kΩ时, 展开状态红外感知系统在125 ℃以下温度环境中能够有效的判定遮光罩系统的状态参数。 为同类型柔性遮光罩监测方案设计提供了基础, 具较大应用前景。
猜你喜欢
红外技术(2022年11期)2022-11-25
环球时报(2022-05-23)2022-05-23
中国典型病例大全(2022年7期)2022-04-22
金桥(2021年4期)2021-05-21
纺织科学研究(2021年1期)2021-03-19
中学生数理化·中考版(2020年10期)2020-11-27
电子制作(2019年7期)2019-04-25
电子制作(2019年7期)2019-04-25
中学生数理化·中考版(2018年11期)2019-01-31
制造技术与机床(2017年3期)2017-06-23