
自跟随垃圾清洁车设计
2020-08-31 05:41潘胤卓肖童肖峰
机电信息 2020年17期
潘胤卓 肖童 肖峰

摘要:为了提高环卫工人的工作效率,设计了具有自跟随功能的垃圾清洁车,可实现清洁车边吸垃圾边跟随操作者的功能。分别从机械结构设计、控制系统设计和动力系统设计3个方面,阐述了该设备的设计原理和方法。
关键词:垃圾清洁车;UWB定位;自跟随
0 引言
目前环卫工人清洁小区卫生主要采用手推垃圾车配合相应的清扫工具进行作业。环卫工人需边推车边打扫,作业效率低,劳动强度大。如果垃圾车能自动跟随环卫工人工作,并具有吸垃圾功能,便可大大提高环卫工人的工作效率。
目前主流的跟随技术有两种,分别是视觉跟随技术和UWB跟随技术。视觉跟随技术采用CCD摄像头传感器,主要依靠图像特征进行定位,具有价格高、处理复杂等特点,在光线不足和视线受阻的情况下无法工作,不适应夜晚和人流密集的环境[1]。UWB跟随技术采用无线脉冲波定位,具有定位准确度高、成本低、不受光线和视线遮挡影响等特点[2]。由于环卫工人的作业环境人流密集,有时在夜晚作业,因此,自跟随垃圾清洁车采用UWB定位技术,可降低环境影响,实现实时跟随的作业目的。
1 机械结构设计
1.1 自跟随垃圾清洁车整体结构
自跟随垃圾清洁车整体结构如图1所示,由吸尘装置、行走装置和架体组成。
1.2 吸尘装置设计
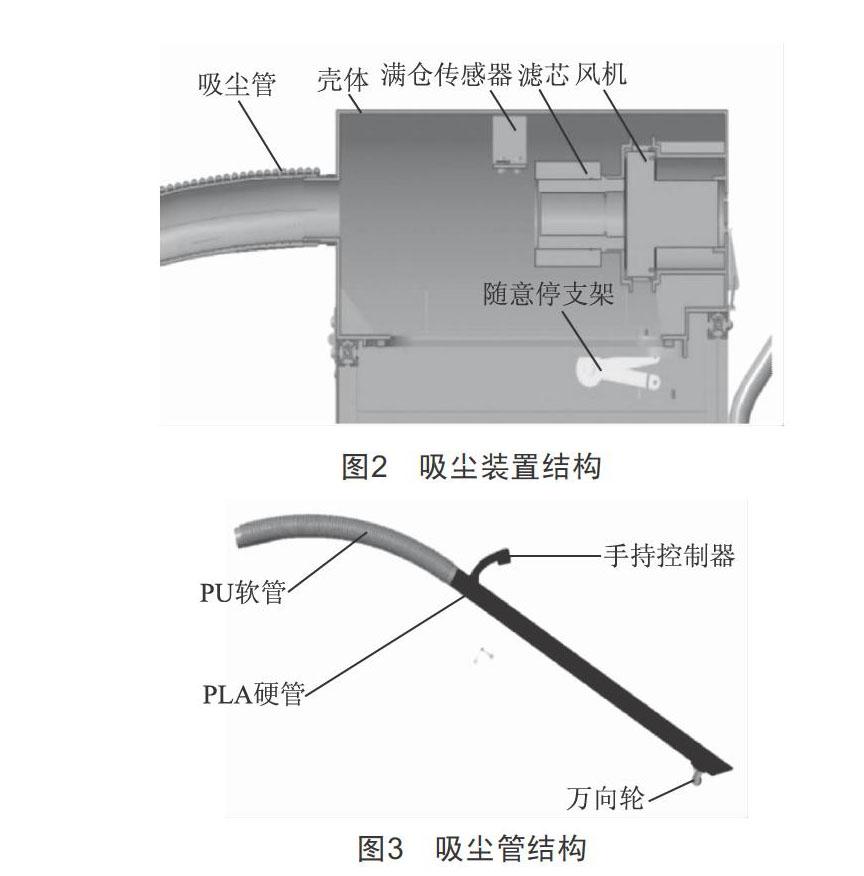
吸尘装置由壳体、风机、滤芯、随意停支杆、吸尘管和满仓传感器组成,如图2所示。风机在壳体内产生负压,垃圾杂物由吸尘管进入壳体。满仓传感器通过检测垃圾的高度判断垃圾桶是否满仓。随意停支杆可支撑壳体抬起,便于操作者更換垃圾箱。吸尘管由PU软管、PLA硬管、手持控制器、万向轮组成,如图3所示,具有操作简单、灵活的特点。
1.3 行走装置设计
行走装置由两个驱动轮和两个万向轮组成,驱动轮由电机、联轴器、支撑架、电磁离合器和轮胎组成。电磁离合器可连接或断开电机的动力输入,切换跟随模式和手动模式。清洁车工作时,当遇到复杂路况时,切换到手动模式,清洁车由操作者推动,应对不同的工作环境。
2 控制系统设计
2.1 UWB跟随技术原理
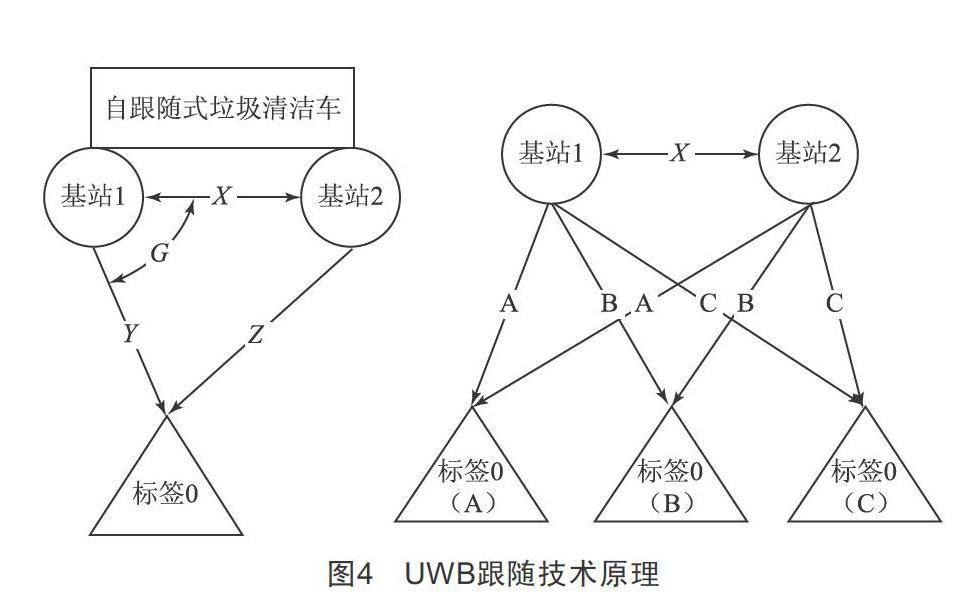
该设备采用的UWB跟随系统,一共有3个UWB模块,被跟随者手持1个模块(标签0),另外2个模块需要安装在自跟随垃圾清洁车的两侧(基站1和基站2)。此UWB模块供电使用的是5 V电源,当移动模块开关打开后,就会发射出无线信号,安装在自跟随垃圾清洁车上的2个UWB基站接收到信号后,通过测量自跟随垃圾清洁车上2个模块(基站1和基站2)与手持模块(标签0)之间的距离,根据余弦定理,可以得出标签0相对于基站1、基站2的相对角度,并得到清洁车中点到手持模块的距离,从而实现跟随功能。系统最大跟随距离为50 m,并具有较强的抗干扰能力。在清洁车基站的安装过程中,2个UWB基站尽量远一点,这样测距产生的误差对于角度的误差会相对较小。
UWB跟随技术原理如图4所示,X为基站1到基站2的距离,Y、Z分别为基站1、基站2到标签0的距离。程序会完成标签0与基站1和基站2之间的距离测量,三角形的3个边确定后,通过余弦定理即可算出G的角度。对于自跟随垃圾清洁车来说,只需要知道一个距离和产生的角度即可,当自跟随垃圾清洁车与标签0之间的距离大于所设定距离时,就会启动跟踪,当自跟随垃圾清洁车与标签0之间的距离小于设定距离时,清洁车则停止不动。当位置关系满足A情况,清洁车需要右转,满足B情况则直行,满足C情况则左转。
2.2 控制系统设计
该设备控制器选用STM32F103C8T6单片机,是一款嵌入式32位的微控制器。它的工作温度在-40~85 ℃,工作电压2~3.6 V。其MCU具有高性能、实时性好、数字信号处理能力强、低功耗等特点,同时具备高集成度和开发简单的特点[3],易于集成,体积小。
2.3 DWM1000模块
定位模块采用DW1000无线收发芯片,支持同步数据传输和精准定位,它的最远传输距离可以达到450 m。芯片所耗功率非常低,最小误差可以控制在10 cm内,可实现定位和双向测距,效果显著。该模块由模式变换器、收发器、SPI接口、电路以及状态控制器组成。通过控制寄存器来实现切换不同的工作状态[4];抗干扰能力强,适合复杂环境的定位应用。系统采用SPI总线与主控芯片通信,最高速率可达到20 MHz。
系统以STM32F103C8为主设备,DWM1000模块为从设备,SI、CS、SCLK、SO引脚为DWM1000模块核心控制引脚。
3 动力系统设计
该设备的动力系统由行走动力和吸尘动力两部分组成。
相比较于铅酸蓄电池,锂电池具有能量密度高、质量轻、环保、充电次数多的优点。考虑到该设备在特殊路况需要操作者推动的特点,需要选用质量轻、高能量密度的电池。该设备选用24 V的磷酸铁锂电池,容量为102 Ah,最大放电电流为140 A,在额定电流下可工作2 h。
两台行走电机分别装于两个驱动轮上,由电机驱动器控制电机启动、停止、反转和调速,从而控制设备的前进、后退和转向。
吸尘风机的工作电压为AC220 V,功率1.1 kW。由于电机启动电流是额定电流的3倍以上,所以选用24 V、5 000 W的逆变器,将直流24 V转化为交流220 V,为吸尘风机提供动力。
4 结语
本文设计了一种具有自跟随功能的垃圾清洁车,采用了基于UWB技术的定位跟踪系统,该系统运用TDOA算法,具有精度高、成本低等特点。该设备可提高环卫工人的工作效率,保障群众生活环境的清洁卫生。
[参考文献]
[1] 张丰,李顺霖,陈仁,等.基于自跟随系统的智能行李箱[J].智能计算机与应用,2019,9(3):156-158.
[2] 周驰东.磁导航自动导向小车(AGV)关键技术与应用研究[D].南京:南京航空航天大学,2012.
[3] 李世光,高富,李文甲,等.基于STM32的超市智能跟随购物机器人设计[C]//2017中国自动化大会(CAC2017)暨国际智能制造创新大会(CIMIC2017)论文集,2017:319-323.
[4] 景建斌,张云龙.基于DW1000的自跟随购物车系统[J].中国科技信息,2019(7):90-91.
收稿日期:2020-06-05
作者简介:潘胤卓(1984—),男,黑龙江人,助教,研究方向:智能环卫设备。
