
基于信息融合的飞行风场估计技术
2020-08-31 05:41袁燎原
机电信息 2020年17期
摘要:风场是影响飞行器导航、制导与控制性能的重要因素。为获取高精度风场的幅值与方向信息,结合飞行器动力学模型与常规传感器测量,应用信息融合的设计思路,提出了一种风场在线估计方法。针对传感器存在测量噪声的问题,采用容积卡尔曼滤波算法,实现了非线性模型的高精度估计。通过与传统方法的仿真对比表明,所提算法在实现风场高频估测的同时,具备更高的估计精度。
关键词:风场;滤波融合;容积卡尔曼滤波;估计精度
0 引言
风场是影响飞行器飞行品质与飞行性能的重要因素。飞行器自主导航需要利用风场信息进行航迹修正,以提高定位精度[1];风梯度动态滑翔[2]、伞降定点回收[3]等的应用则要求风场参数已知,从而实现能量转化与航迹规划。
目前常用的测量风速方法包括水平空速归零法、航位推算法以及矢量三角形法。水平空速归零法利用航向传感器进行盘旋判定,根据空速传感器测量值计算平均风速,测量设备简单且精度较高,但仅适合定点风速测量,无法应用于大区域、长航时任务下的风速估计。航位推算法基于相对、绝对以及牵连运动的矢量合成关系,通过航位推算位置与实际位置的差分运算估计风场信息,计算简便,但测量精度随运算频率的增大而明显降低。矢量三角形法应用较为广泛,综合空速、地速、姿态、航向以及气流角等飞行参数,可实现三维风场信息的高频率连续估测,然而大气传感器的高频噪声会降低风场估测的精度。
针对风场估计问题中存在的传感器测量噪声、风场变化等问题,本文采用信息融合的思想,基于常规的导航与大气传感器,提出了一种风场滤波估计架构,根据飞行器运动学特性建立非线性滤波模型,并应用容积卡尔曼滤波方法,保证了在测量噪声和风场突变下的风场估测精度。
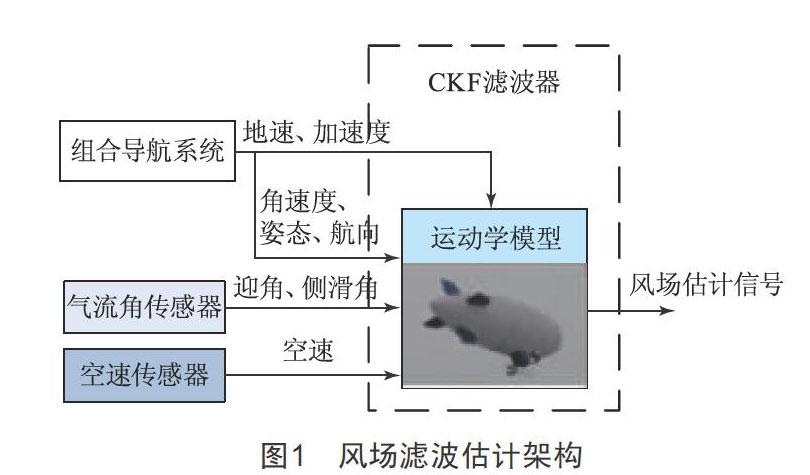
1 风场滤波估计架构
风场估计基于飞行器运动学模型,并综合了組合导航系统、空速、气流角传感器测量信息,应用CKF算法实现风场信息的融合估计,其架构如图1所示。飞行器运动学模型反映了加速度、角速度变化对速度、姿态、航向等飞行参数的影响。气流角和空速传感器测量信号——空速、迎角、侧滑角描述了飞行器相对于空气来流的运动特性,与组合导航系统中的地速、姿态及航向信息综合后,基于风速、空速、地速的矢量三角形关系,实现风速信息的分离估计。CKF算法则用于解决传感器测量噪声问题,提高风场估计信号的精度。
2 风场作用下的动力学分析
空速Vb、Vw风速和地速Vg满足矢量三角形关系[4]:
式中,A=[Ax Ay Az]T为气动合力和推力所对应的比力;CE B为地面坐标E到机体坐标系B的转换矩阵;g为地面坐标系下的重力加速度;ω=[p q r]T为角速度。
综合以上两式可得:
通常情况下风速变化率远小于飞行器速度,可应用风场冻结假设进行近似处理:
飞机的动力学方程简化为:
三轴比力和角速度值均可由机载惯导测量获得,因此可以通过设计非线性滤波估计器,实现对空速Vb分量的精确估计,进一步从地速Vg中分离出风速Vw。
3 滤波器设计
3.1 滤波模型
3.1.1 状态方程的建立
基于动力学关系分析,采用一阶马尔可夫过程对风速建模描述,同时考虑姿态角、角速度信号误差数量级较小,对计算精度影响可以忽略,不作为随机变量处理。选取机体坐标轴系下空速三轴分量ub、vb、wb和北向、东向、地向风速WN、WE、WD为状态变量x:
3.1.2 量测方程的建立
基于矢量三角形关系,选取惯导测量的北向、东向、地向地速VNm、VEm、VDm以及空速、迎角、侧滑角测量值Vm、αm、βm为量测向量:
3.2 CKF算法
容积卡尔曼滤波CKF算法采用一组等权值的容积点逼近最优状态的后验分布,相对于传统的UKF算法,在计算复杂度相当的前提下,能更精确地保存一阶矩和二阶矩信息,且数值稳定性不受状态维数的影响,更为稳定可靠。
离散化滤波模型为:
系统噪声wk与量测噪声vk为时间不相关的白噪声序列,wk~N(0,Qk),vk~N(0,Rk),E[wkvj]=0。给定滤波初值x0与P0,CKF算法步骤如下:
(1)时间更新:
1)生成容积点:
由k-1时刻的状态估计k-1/k-1和协方差矩阵Pk-1/k-1,根据球面径向规则,计算容积点:
2)状态变量与协方差矩阵的一步预测:
(2)量测更新:
1)生成容积点:
2)量测一步预测计算:
容积点的传播计算:
3)新息方差与互协方差矩阵的计算:
(3)计算卡尔曼增益,更新状态估计和误差协方差矩阵:
4 仿真与分析
选取某型飞艇为仿真对象,分别应用典型的航位推算法DR、矢量三角形法TR和本文提出的滤波融合方法DF进行风速估计。在仿真时刻t=50 s加入风场扰动,北、东、地向扰动风速分别为5 m/s、4 m/s、2 m/s。进行50次独立的Monte Carlo试验,选取均方根误差RMSE及其均值作为风速估计精度的评价指标。TR方法的北、东、地风速误差分别为0.85 m/s、0.78 m/s、0.59 m/s,DR方法的北、东风速误差分别为0.42 m/s、0.34 m/s,DF方法的北、东、地风速误差分别为0.25 m/s、0.24 m/s、0.20 m/s。仿真结果表明,直接采用传感器信息解析运算的TR算法,受测量噪声影响,风场估测精度相对较低。DR算法在应用差分GPS保证分米级位置测量精度的前提下,可实现二维定常风场的高精度估测,估计精度与DF算法相当,但需采用较大的运算周期抑制测量噪声的影响,从而造成在风场变化时估测误差大幅增加。本文提出的DF算法基于矢量三角形关系,应用动力学模型滤波的方法,降低了测量噪声对解析运算的影响,在定常风场及风场突变下均具备较高的估计精度。
5 结语
风场估测方法采用常规传感器,无须专门改装或增加测量设备,解析计算基于通用动力学方程和矢量几何关系,不依赖于飞行器气动参数,大大降低了参数不确定性的影响。同时算法实现简便稳定,易于工程实现。所获取风速信号对于提升飞行控制、任务管理、导航制导等关键性能具有重要价值。
[参考文献]
[1] 高社生,张极,党进伟.风场估计算法及其在组合导航中的应用[J].飞行力学,2013(5):467-471.
[2] 朱炳杰.无人机风梯度动态滑翔机理与航迹优化研究[D].长沙:国防科学技术大学,2016.
[3] 吴成富,邵朋院,马松辉,等.无人机伞降定点回收技术研究[J].计算机仿真,2012(6):104-107.
[4] 肖业伦,金长江.大气扰动中的飞行原理[M].北京:国防工业出版社,1993.
收稿日期:2020-06-01
作者简介:袁燎原(1988—),男,安徽亳州人,博士,工程师,研究方向:浮空器飞行控制系统设计。
