
用于瓶装奶检测和搬运的多自由度智能机械手的三维建模设计
2020-08-31 05:41邓睿蔡颖华李娜秦薇胡诗悦
机电信息 2020年18期
关键词:三维建模
邓睿 蔡颖华 李娜 秦薇 胡诗悦
摘要:机械手应用于工业生产,能更好地辅助工人完成工作。现介绍一种用于检测和搬运瓶装奶的智能机械手装置的总体结构和工作原理,并基于整体结构设计,给出三维建模和整体装配效果图,从而将机械手的外观与各部件之间的装配关系直观地展现出来。
关键词:多自由度;瓶装奶;智能机械手;三维建模
0 引言
瓶装奶具有易储存携带、较为环保且瓶子可循环利用的优点[1-2]。为了能够简单快捷地进行瓶装奶搬运操作,提高工作效率,设计了一种具有检测功能的智能机械手装置,并给出了三维效果图,以便理解。
1 总体结构及工作原理
1.1 总体结构
如图1所示,设计了一种在生产线上同时具备检测和搬运瓶装奶功能的智能机械手装置,共有主箱体、第一机械臂、第二机械臂、第三机械臂和机械爪盘五部分。主箱体由40方管焊接而成,四周是用1.5 mm A3钢板的折弯钣金焊接封箱,正前方是活动箱门钣金,侧面左下角割出活动小方门,打开后其内固定安装有电源插口和急停按鈕,上端活动安装有第一机械臂。第一机械臂外表面固定安装有控制面板,上端活动安装有第二机械臂。第二机械臂上端固定安装有第三机械臂,第三机械臂中部设有转轴,右端端口处固定安装有机械爪盘[3]。
1.2 工作原理
装置整体通过接外部电源供电,机械手开始工作,移动至瓶装奶上方。第一机械臂上下左右移动到达夹持位置,机械爪盘信号发射器发射信号检测瓶装奶,若瓶装奶的体积达到合格标准,则会挡住信号发射器发射的信号,机械爪盘会夹紧瓶装奶,将其搬运到合格产品线,否则,控制器会改变运动轨迹,将瓶装奶放到不合格产品线,机械臂退回原位,完成工作后关闭。
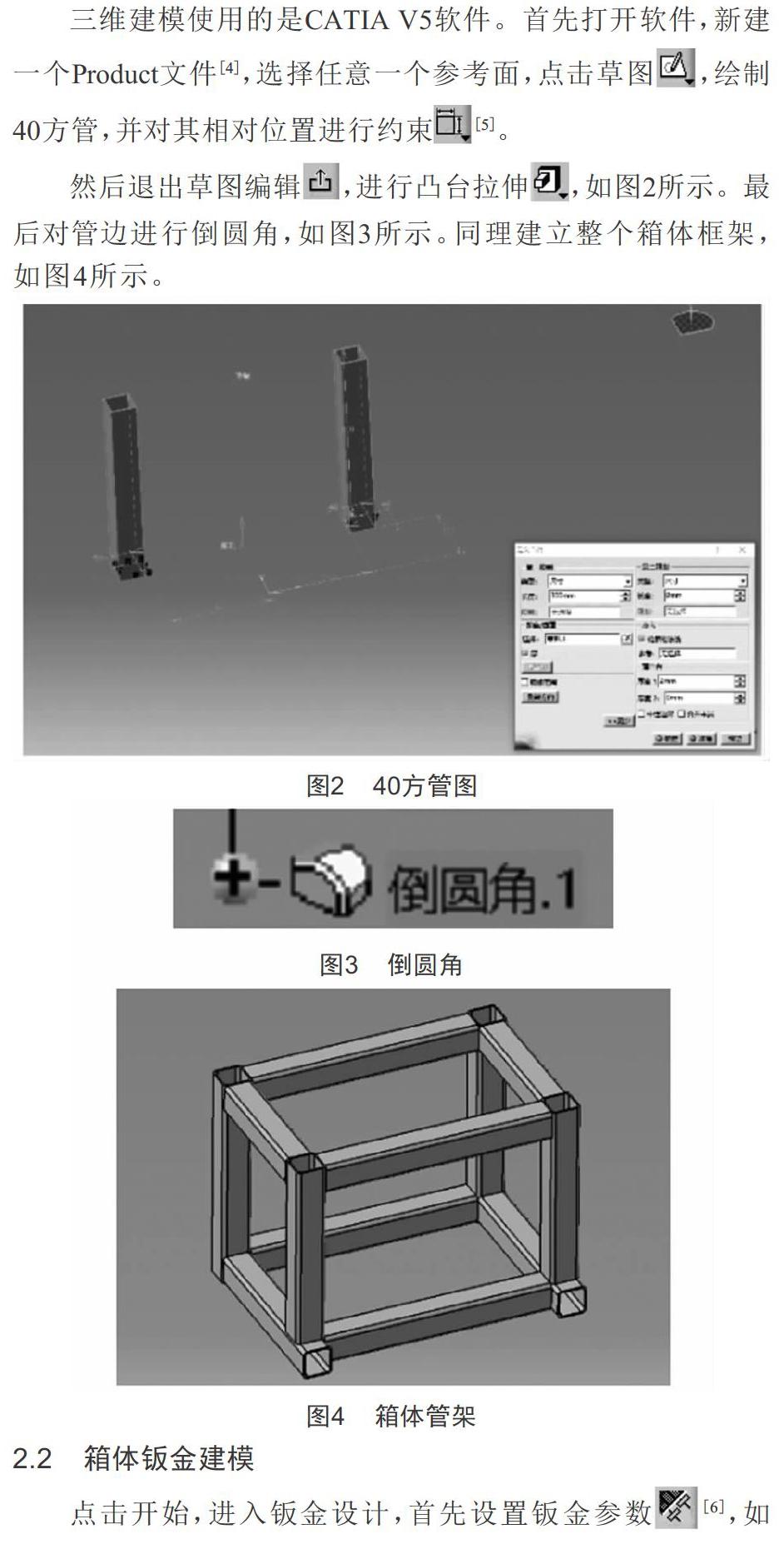
2 三维建模
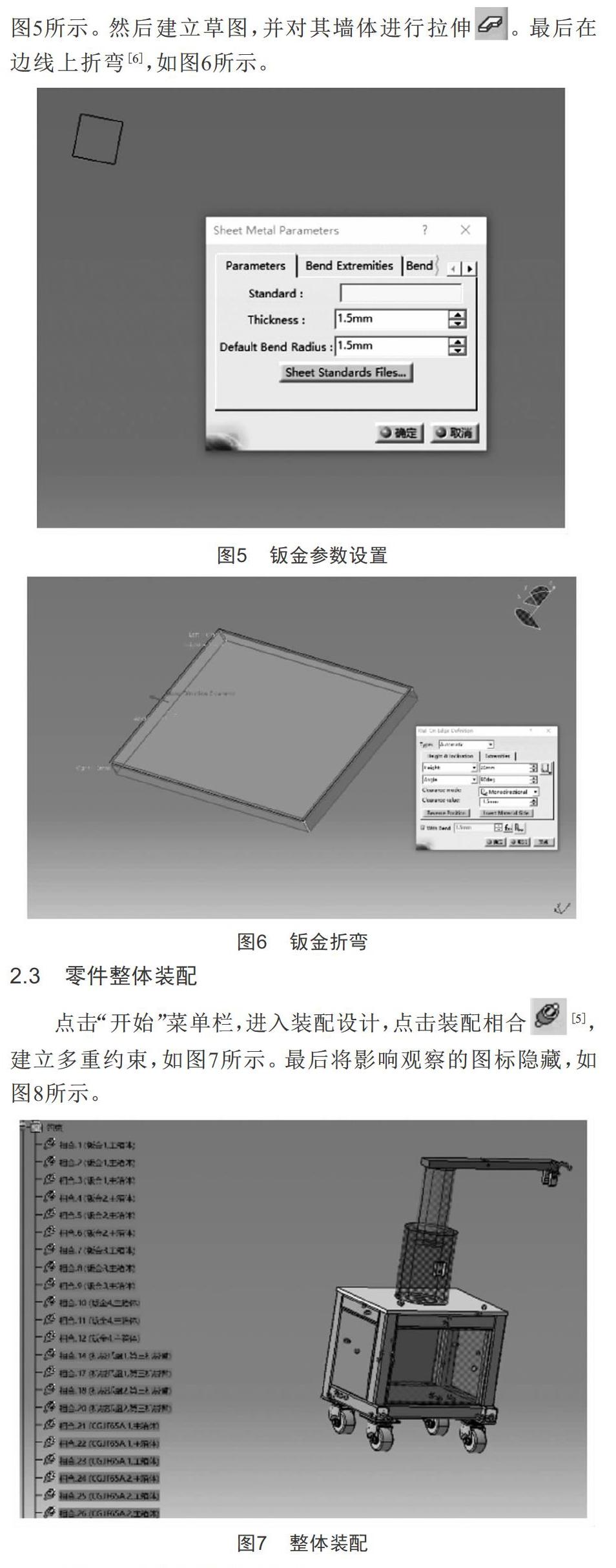
2.1 箱体建模
2.2 箱体钣金建模
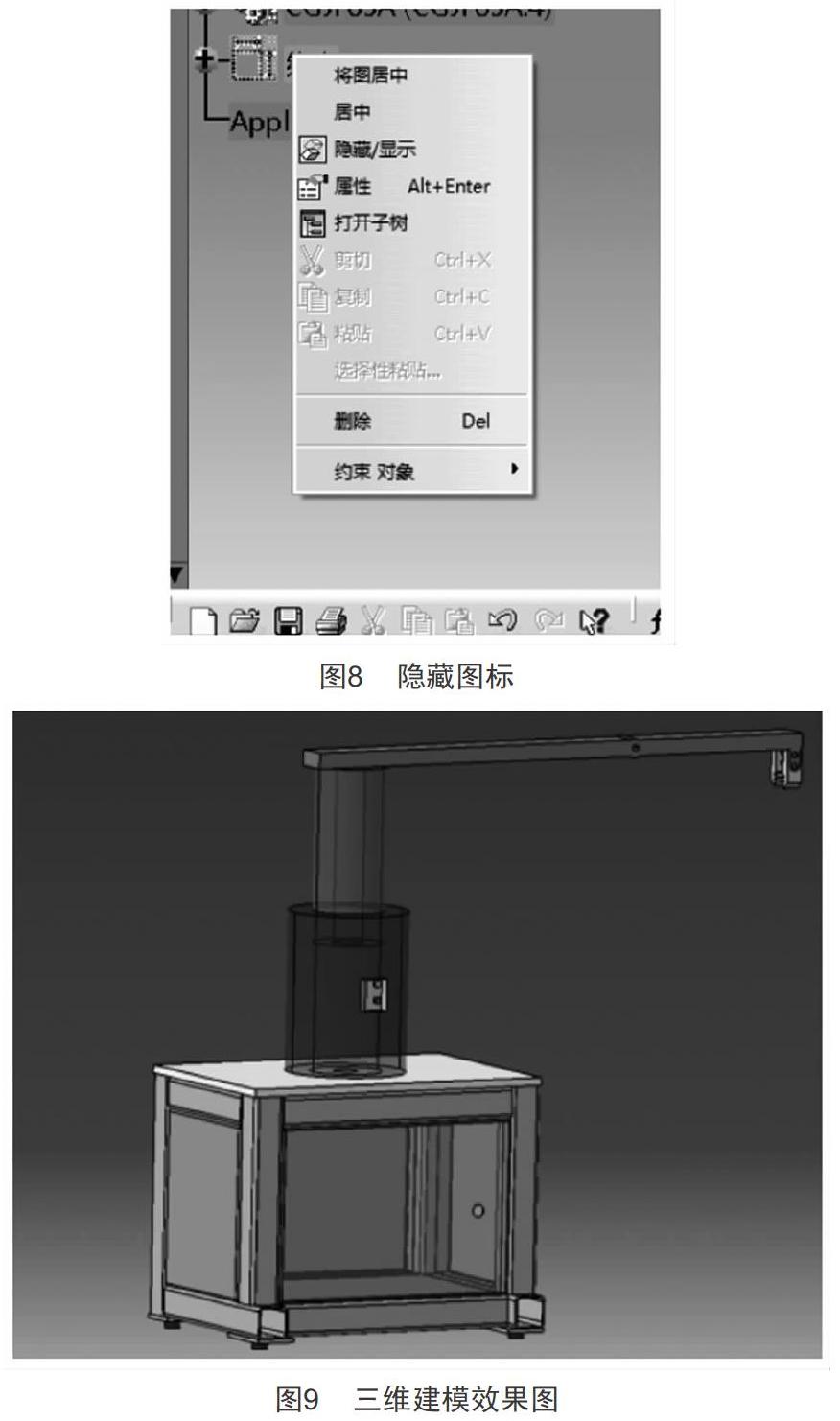
2.3 零件整体装配
最终三维建模效果如图9所示。
3 结语
本文介绍了一种用于瓶装奶检测和搬运的智能机械手装置的总体结构和工作原理,基于机械手整体结构设计,建立了三维模型效果图,将机械手的外观与各部件之间的装配关系直观地展现了出来。
[参考文献]
[1] 王建卫.多关节型搬运机械手结构设计分析[J].科技创新与应用,2015(17):54.
[2] 孙桓.机械原理[M].6版.北京:高等教育出版社,2001.
[3] 邓睿,路和,曹艳,等.一种用于检测和搬运瓶装奶的智能机械手装置:CN209491756U[P].2019-10-15.
[4] 张学文.CATIA机械零件参数化设计[M].北京:机械工业出版社,2017.
[5] 谢龙汉,单岩,周超明.CATIA V5零件设计[M].北京:清华大学出版社,2005.
[6] 李占辉.关于冲压模具设计中的机械运动分析[J].科技致富向导,2013(2):125.
收稿日期:2020-04-23
作者简介:邓睿(1977—),女,四川德阳人,副教授,研究方向:机电结构优化及控制技术应用。
猜你喜欢
软件导刊(2016年12期)2017-01-21
东方教育(2016年21期)2017-01-17
计算技术与自动化(2016年4期)2017-01-11
中小企业管理与科技·上旬刊(2016年12期)2017-01-05
科学与财富(2016年15期)2016-11-24
电脑知识与技术(2016年24期)2016-11-14
商(2016年30期)2016-11-09
科技视界(2016年16期)2016-06-29
科技视界(2016年16期)2016-06-29
科技视界(2016年8期)2016-04-05
