机器人匀速仿形运动控制方法研究
2020-08-31 14:52郭光远苏成志
科技创新与应用 2020年25期
关键词:机器人
郭光远 苏成志

摘 要:为了提高工业机器人在仿形运动中的匀速性能,对匀速仿形跟踪运动方法进行了研究:采用自适应NURBS曲线插补方法生成仿形路径点,根据点云数据进行仿形末端姿态的规划,通过连续路径匀速运动方法生成最终轨迹。最后在matlab仿真平台进行了仿真分析,通过插补次数为35次NURBS插补后,通过连续路径匀速运动轨迹规划生成的轨迹的速度波动由5%降至0.2%以内,验证了该方法的有效性。
关键词:机器人;仿形运动;轨迹规划;NURBS曲线
中图分类号:TP391 文献标志码:A 文章编号:2095-2945(2020)25-0011-03
Abstract: In order to improve the uniform velocity performance of industrial robots in copying motion, this paper studies the uniform velocity copying motion method: an adaptive NURBS curve interpolation method is adopted to generate copying trajectory position points, copying trajectory attitude planning is carried out according to point cloud data, and the final trajectory is generated by continuous path constant velocity motion method. Finally, the simulation analysis was carried out on the matlab simulation platform. After the number of NURBS interpolation was 35 times, the velocity fluctuation of the trajectory generated by the constant motion trajectory planning of the continuous path decreased from 5% to less than 0.2%, verifying the effectiveness of the method.
Keywords: robot; copying motion; trajectory planning; NURBS curve
引言
为了实现复杂曲面高质量喷涂,在喷涂过程中喷枪沿曲面的距离和速率要稳定不变,要求机器人具有较高的匀速仿形跟踪复杂曲面能力。
机器人的仿形轨迹的确定目前主要有两种方式,一种是通过示教的方式按照期望的运动轨迹进行位置捕捉,内部存储器可以记录各个运动轴的运动轨迹;另一种为模型位置提取的方法:将工件模型输入机器人控制器或上位机,通过提取工件模型上的数据点得到运动轨迹,从而实现仿形运动[1-2]。非均匀有理B样条(NURBS)是一种完美、通用的曲线曲面表达方法,它的优点是既能精确描述自由曲线曲面,又能精确表达规则曲线曲面,所有参数化的曲线都可以统一在NURBS的标准形式之中[3],针对数控加工梁盈富等[4]运用三阶NURBS曲线实现对自由曲线的插补运算,通过改进的四阶阿当姆斯微分方程预估插补中的曲线参数,实现数据点密化,秦霞等[5]提出了一种基于工业机器人的多约束的自适应高精度NURBS曲线插补方法,该方法实时性好,精度高。
目前仿形运动主要通过示教方式和模型位置提取的方式直接选取工件上的特征点作为路径点,这样的折线路径连续性差会影响仿形运动的匀速性能,且机器人末端在到达中间点时会引起冲击和震动。本文采用NURBS参数曲线描述仿形路径、把仿形工件表面特征点作为曲线的控制顶点进行自适应NURBS曲线插补,从而生成仿形路径并进行末端姿态的规划,再通过基于抛物线过渡的连续路径匀速运动方法生成最终的轨迹,通过仿真实例验证该方法的有效性。
1 自适应仿形路径规划方法
仿形运动是机器人喷涂领域中的关键技术,即根据相关的工艺要求,使机器人末端与工件保持特定距离和速度,从而完成对工件表面轮廓的仿形。仿形轨迹即机器人的运动轨迹,轨迹路线近似于工件外轮廓的放大曲线,且末端喷枪始终垂直于工件表面。为了提高仿形运动的匀速性能,需要对机器人末端路径拟合处理。本文采用NURBS曲线来描述仿形路径,根据路径的曲率变化情况自适应调整曲线的插补步长,仿形轨迹规划流程分为以下三个步骤:(1)通过模型数据提取的方法得到工件表面的特征点;(2)令该特征点作为机器人工具坐标系的原点,并作为控制顶点进行自适应NURBS曲线插补生成仿形路径点;(3)求出各位置点对应曲面的法向量,定为机器人工具系的Z轴方向, Y轴方向为沿仿形轨迹方向,再由Z、Y轴得到X轴,从而得到仿形末端姿态。
采用NURBS参数曲线描述仿形路径的优势在于:NURBS参数曲线为自由型曲线提供了统一的数学表达式;权因子的引入为曲线的光顺处理提供了充分的灵活性。其表达式为:
根据公式(10)至(12)可以求出整个轨迹点的位置、速度、加速度,然后和轨迹的姿态一起实时发送给机器人控制器,使其执行仿形运动。
3 仿真与分析
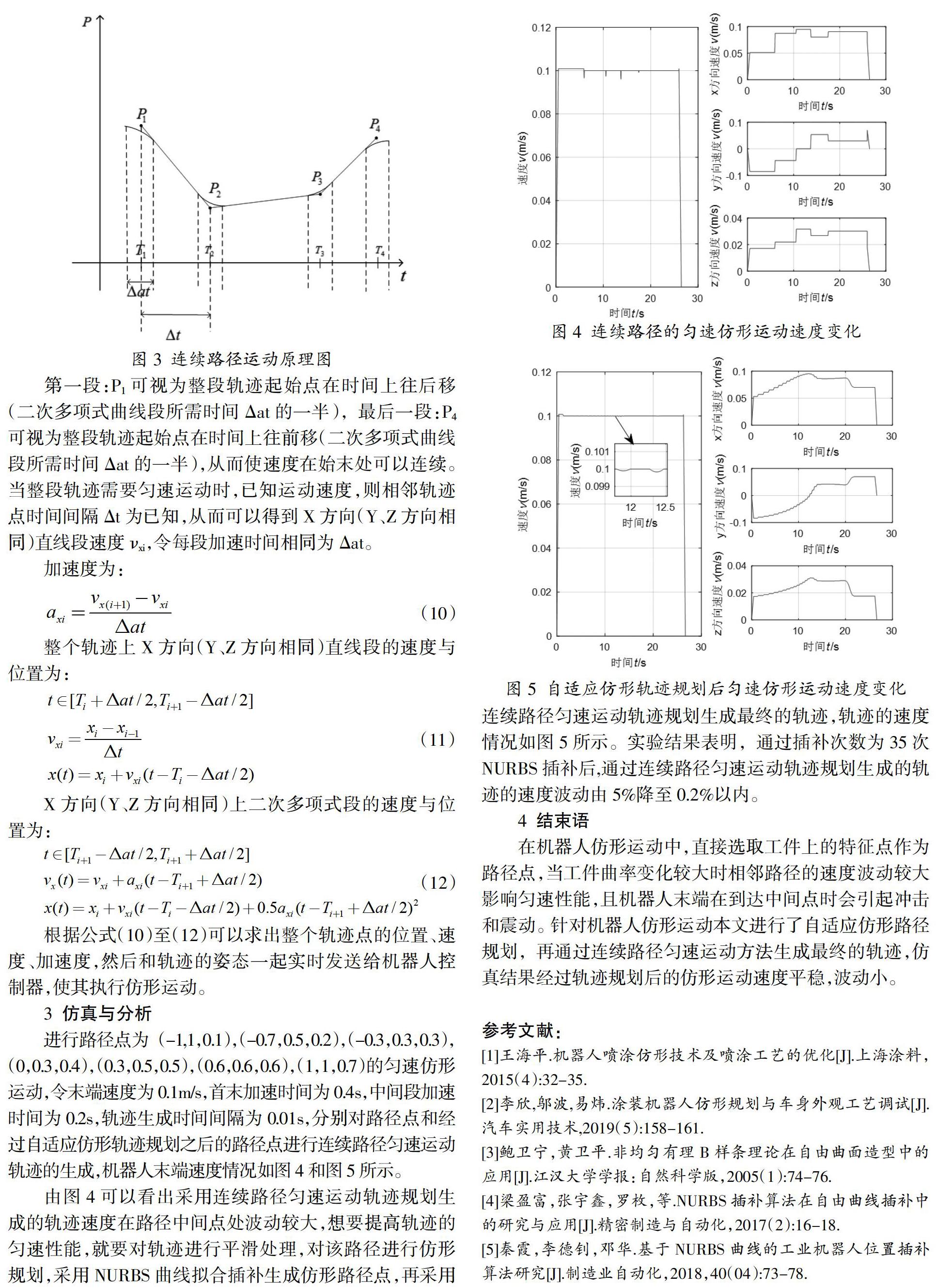
进行路径点为(-1,1,0.1),(-0.7,0.5,0.2),(-0.3,0.3,0.3),(0,0.3,0.4),(0.3,0.5,0.5),(0.6,0.6,0.6),(1,1,0.7)的勻速仿形运动,令末端速度为0.1m/s,首末加速时间为0.4s,中间段加速时间为0.2s,轨迹生成时间间隔为0.01s,分别对路径点和经过自适应仿形轨迹规划之后的路径点进行连续路径匀速运动轨迹的生成,机器人末端速度情况如图4和图5所示。
由图4可以看出采用连续路径匀速运动轨迹规划生成的轨迹速度在路径中间点处波动较大,想要提高轨迹的匀速性能,就要对轨迹进行平滑处理,对该路径进行仿形规划,采用NURBS曲线拟合插补生成仿形路径点,再采用连续路径匀速运动轨迹规划生成最终的轨迹,轨迹的速度情况如图5所示。实验结果表明,通过插补次数为35次NURBS插补后,通过连续路径匀速运动轨迹规划生成的轨迹的速度波动由5%降至0.2%以内。
4 结束语
在机器人仿形运动中,直接选取工件上的特征点作为路径点,当工件曲率变化较大时相邻路径的速度波动较大影响匀速性能,且机器人末端在到达中间点时会引起冲击和震动。针对机器人仿形运动本文进行了自适应仿形路径规划,再通过连续路径匀速运动方法生成最终的轨迹,仿真结果经过轨迹规划后的仿形运动速度平稳,波动小。
参考文献:
[1]王海平.机器人喷涂仿形技术及喷涂工艺的优化[J].上海涂料,2015(4):32-35.
[2]李欣,邬波,易炜.涂装机器人仿形规划与车身外观工艺调试[J].汽车实用技术,2019(5):158-161.
[3]鲍卫宁,黄卫平.非均匀有理B样条理论在自由曲面造型中的应用[J].江汉大学学报:自然科学版,2005(1):74-76.
[4]梁盈富,张宇鑫,罗枚,等.NURBS插补算法在自由曲线插补中的研究与应用[J].精密制造与自动化,2017(2):16-18.
[5]秦霞,李德钊,邓华.基于NURBS曲线的工业机器人位置插补算法研究[J].制造业自动化,2018,40(04):73-78.
猜你喜欢
红领巾·萌芽(2022年2期)2022-01-31
学苑创造·A版(2017年9期)2017-09-25
知识就是力量(2017年2期)2017-01-21
快乐作文·低年级(2016年9期)2016-09-30
南风窗(2016年7期)2016-03-31
知识就是力量(2016年2期)2016-02-01
小朋友·快乐手工(2015年11期)2016-01-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07