
海水悬浮物多通道原位自动采集与过滤系统设计
2020-08-18 02:41:12陈永华刘庆奎李晓龙姜静波倪佐涛
工程与试验 2020年2期
陈永华,姜 斌,刘庆奎,李晓龙,姜静波,倪佐涛
(中国科学院海洋研究所,山东 青岛 266071)
1 引 言
海洋中悬浮颗粒物(suspended particles concentration,SPC)(包括浮游微生物和悬浮泥沙等)是沉积物的主要来源,而沉积物是许多痕量元素由表层水向底层水输送的主要载体,在元素输送、循环和去除中充当着重要角色,是元素的一种赋存形态[1]。水体表层悬浮颗粒物的量影响着水的透明度和真光层的厚度,从而影响浮游生物的光合作用和初级生产力[2];悬浮颗粒物本身可作为微小生物的食物,而这些无机颗粒物和有机碎屑到达海底后成为底栖生物的主要食物来源[3];地震或浊流能引起大量沉积物的悬浮,使底层水密度大大增加,并常常改变底层水的温度和盐度[4]。因而,悬浮颗粒物的精确观测对研究海洋物质输运和水体要素特征具有重要意义。在近岸海域,悬浮颗粒物的沉积影响着海水水质、生物群落和地球化学形态。
目前,悬浮颗粒物浓度的测量最根本的方式是通过现场获取水样,回实验室后过滤分析;或基于光学、声学、密度、介电常数等测量进行估计。因此,其测量方法主要分为两类,即传统方法和现代方法。传统方法是现场取水(三点或六点法),然后对水样进行过滤、称重、计算悬浮颗粒物质量浓度,这被认为是最准确的方法,但仅能得到某几层深度、较大时间间隔的悬浮颗粒物数据,耗时长且耗费较大。现代方法是利用光学、声学、密度、介电常数等传感器间接观测悬浮颗粒物浓度,其特点是效率高,连续采集,可获得具有较高时空分辨率的悬浮颗粒物信息,但其测量精度较低,而且这些间接观测悬浮颗粒物浓度的方法,需要对所用设备定期进行校准,并受到适用测量深度的限制。因此,如何省时省力地实现多测点、全水深、多水层、长时次悬浮颗粒物浓度的测量,是目前迫切需要解决的问题。
海水原位过滤成为传统的海水提升后到实验室过滤方法的有益补充,但由于全是单通道测量,其优势在于大体积过滤(单次抽滤水量100L以上),要实现大体积过滤而滤膜不被堵塞,要求水质非常好,因此其主要用在深水海域[5]。国外海水原位过滤技术的研发较早,起始于20世纪80年代。美国伍兹霍尔海洋研究所较早开始海水直流泵和海水原位过滤技术研发,20世纪90年代德国基尔大学海洋学院也研制了工作深度达到4000m的悬浮颗粒物原位过滤装置[6],如图1(a)所示;伍兹霍尔海洋研究所和Mclane公司合作开发了大体积水样抽滤采样系统(Large Volume Water Transfer System(WTS-LV))[7],并形成了产品,如图1(b)所示。
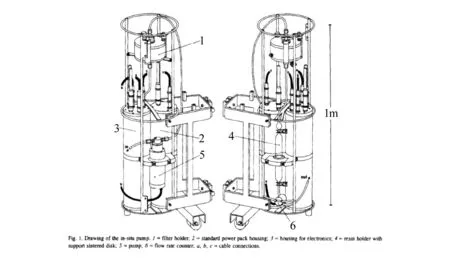
(a)德国基尔大学研制的悬浮颗粒物原位过滤装置
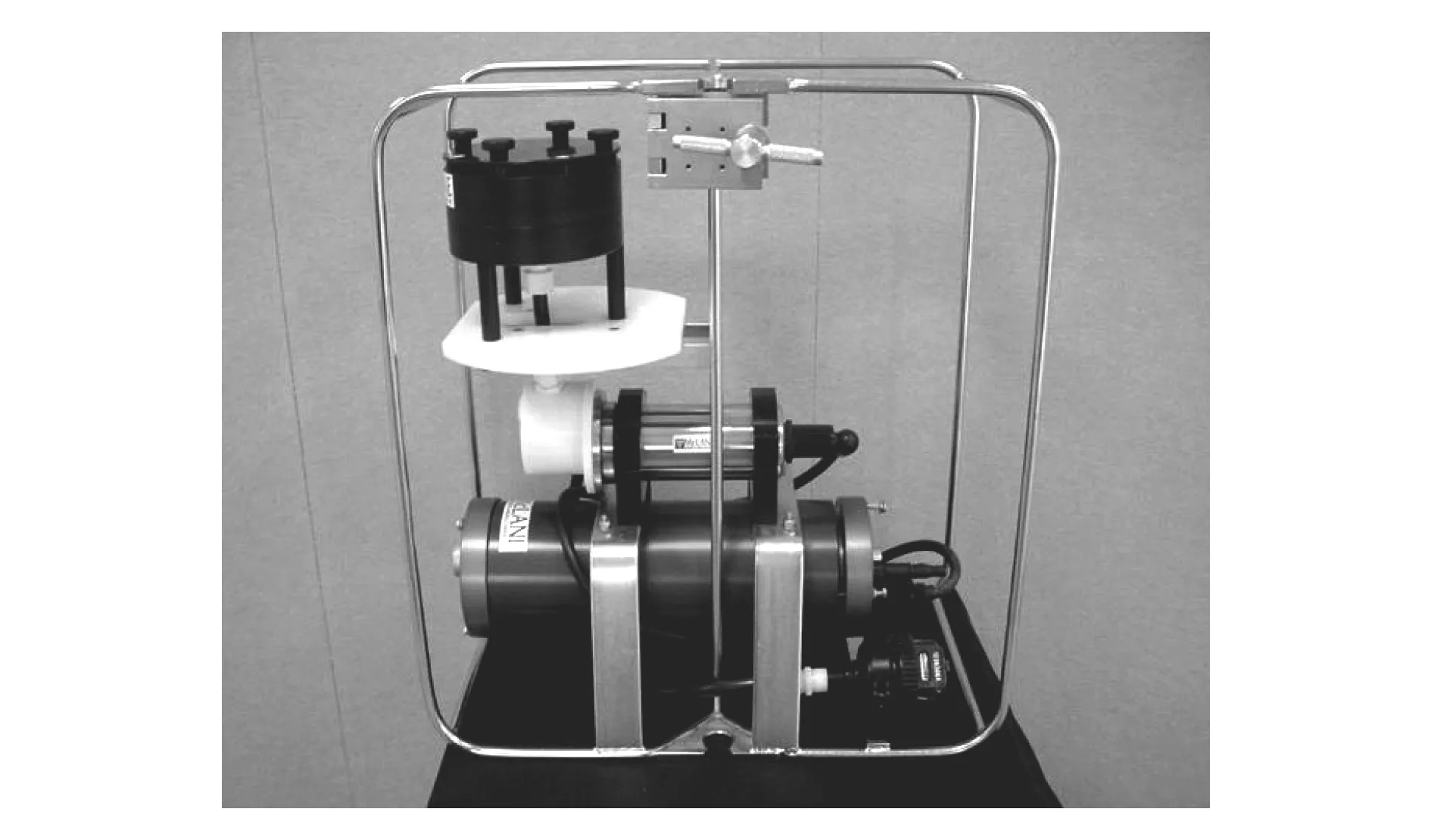
(b)美国McLane公司研制的悬浮颗粒物原位过滤装置图1 悬浮颗粒物原位过滤装置
WTS-LV是一款大容量水体原位微孔过滤采样器,连续抽取水体,可让水体通过过滤器支架内的薄膜滤纸或吸附滤筒,收集水体中的悬浮和溶解性颗粒物质,国内外利用它开展了一系列取样研究[8-11]。WTS-LV采样器主要功能部件采用的是柱塞泵,其主体采用不锈钢及钛合金制成,最大可承受5500m水深压力,可应用于海洋、湖泊、河流、水库等多种水体,进行浮游生物样品、痕量金属样品、沉积物颗粒等采样工作[12]。另外,基于开展研究的需要,有些用户还在深海微生物取样装置上集成安装了获取采样区域环境参数(CTD、荧光计、浊度计等)的传感器[13]。
尽管WTS-LV已成为产品,但仍存在不足之处:过滤装置密封方式不好,试验完毕过滤装置内残留水液,取拿滤膜时会冲刷滤膜上的残留物,造成试验误差;过滤装置的滤膜面积稍小,容易造成滤膜堵塞;流量计对水流的阻碍较大。因此,国外对使用该装置的检测结果准确性及误差因素等进行了研究探讨,如:关于深海表层原位过滤结果和实验室过滤的比较[14];针对特殊的应用(海水中210Po和210Pb的检测),对检测结果和误差校正因子等进行了研究[15];以及对此类装置进行了比测,探究其结果的准确性[16];还有比对方法与试验误差因素的研究[17,18]等。
国内海水原位过滤技术研发始于近5年,由中国科学院海洋研究所发起,于2015年底完成深海微生物原位获取原理样机的研制,并成功完成深海试验[19,20]。其主要功能部件-总成海水泵采用的是充油电机带动的隔膜泵,主体采用钛合金制成,如图2所示。该系统工作水深可达4000m,进行3层分级过滤,测试深海海水过滤量为5L/min,可短时间内完成高通量海水的原位取样[21]。

图2 中科院海洋所研制的深海微生物原位取样装置
综上所述,目前悬浮颗粒物的获取手段中,传统的现场采水、实验室过滤称重的方法,费时费力且对于易分解物质分析存在误差;现代间接测量方法由于反演计算原理的问题,一直存在测量精度和适用范围的缺陷。海水原位过滤技术已得到一定程度的发展,但目前主要应用在深水海域,并且只有一套滤膜放置装置,没有分时选通的功能,通道单一,尚未实现连续多个时次的海水原位过滤,在近海原位过滤应用中受限。因此,结合国内外已有的研究经验,对海水原位过滤进行了更加深入系统的研究。基于海水悬浮颗粒物分析研究需求,设计制作海水悬浮物多通道原位自动采样及过滤系统。
2 海水原位分时次多通道过滤装置设计
基于原理验证,设计了具有11通道的海水原位取样及过滤装置。海水经粗过滤后,由水下泵经流量计后泵入组合阀体,中控装置打开组合阀体的相应通道,海水就会经过其对应的过滤器,实现海水原位采集与过滤。定时选通不同的阀体通道,就可以实现海水原位分时次多通道过滤,设计装置的原理框图如图3所示。
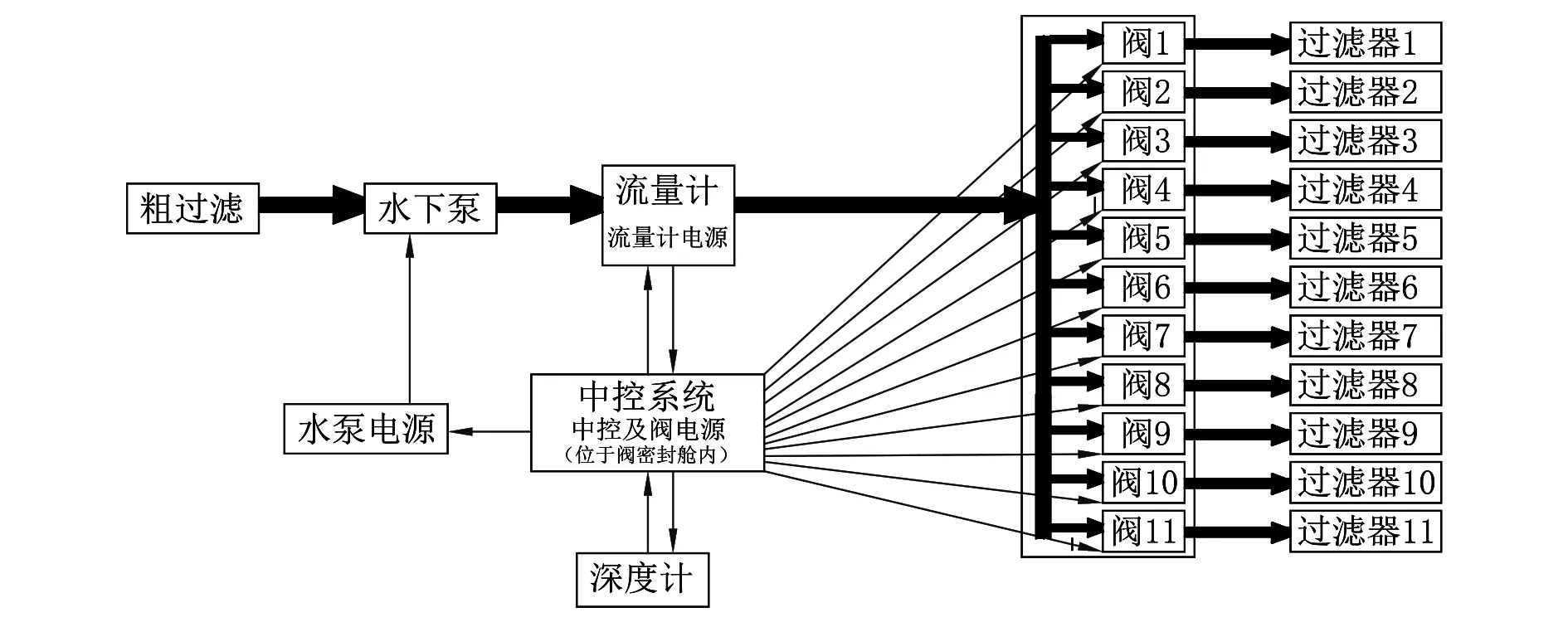
图3 海水原位分时次多通道过滤装置设计框图
2.1 水下泵设计
海洋水下泵是用来抽吸海水样品、输送过滤后的液体的动力部件。从能量观点来说,它是一种转换能量的机器,把原动机的机械能转化为被输送深海海水的能量,使海水的流速和压力增加。这里需要解决深海电机的动密封问题,以及其在高压下(1MPa以上)的动力性能和工作稳定性等问题。
1.水密接插件;2.贯通杆;3.左端盖;4.固定螺栓;5.O型圈;6.压力缓冲管;7.压盘;8.电机固定杆;9.密封筒;10.直流电机;11.填充油;12.右端盖;13.油封;14.连接轴;15.泵头图4 海洋水下集成泵装置设计图
所设计的集成海洋水下泵(如图4所示)包括密封装置、直流电机、压力缓冲装置、连接轴、泵头及海洋水下泵水密接插件等。该密封装置包括海洋水下泵圆筒及密封连接于该海洋水下泵圆筒左右两端的端盖,两端盖分别通过海洋水下泵固定螺栓固接于海洋水下泵圆筒的左右两端,并分别通过O型圈与海洋水下泵圆筒的左右两端实现密封。在密封装置内灌装有填充油,直流电机通过电机固定杆和定位销容置于该密封装置内,轴端与海洋水下泵右端盖的内侧抵接,尾端与深海左端盖之间依次压上压垫及压盘。压力缓冲装置包括两个贯通杆和缓冲管等,贯通杆的一端通密封舱外侧,另一端位于海洋水下泵左端盖内侧,缓冲管浸于填充油中,两端分别安装于两个贯通杆的舱内端上。该缓冲管的内部通过贯通杆与密封装置的外部相连通,水下工作可保持密封装置内外具有相同的压强。连接轴密封安装在海洋水下泵右端盖上,将直流电机的转轴密封延伸到泵头,从而实现水下泵水。
2.2 水下流量计设计
由于水下泵的流量不大,流量计选用每小时20~60L的小型精准流量计。由于应用在水下,需要对其进行密封处理,设计耐水压力为2MPa。流量计的输出信号为脉冲,通过仪表系数K计算成流量值,再通过单片机对脉冲信号进行采集处理,并最终由中控装置采集控制。
2.3 多通道选通装置设计
此装置设计为11通道,通道选通采用多电磁阀并联装置,共用进水口,出水由电磁阀选通,其电磁阀组设计如图5所示。
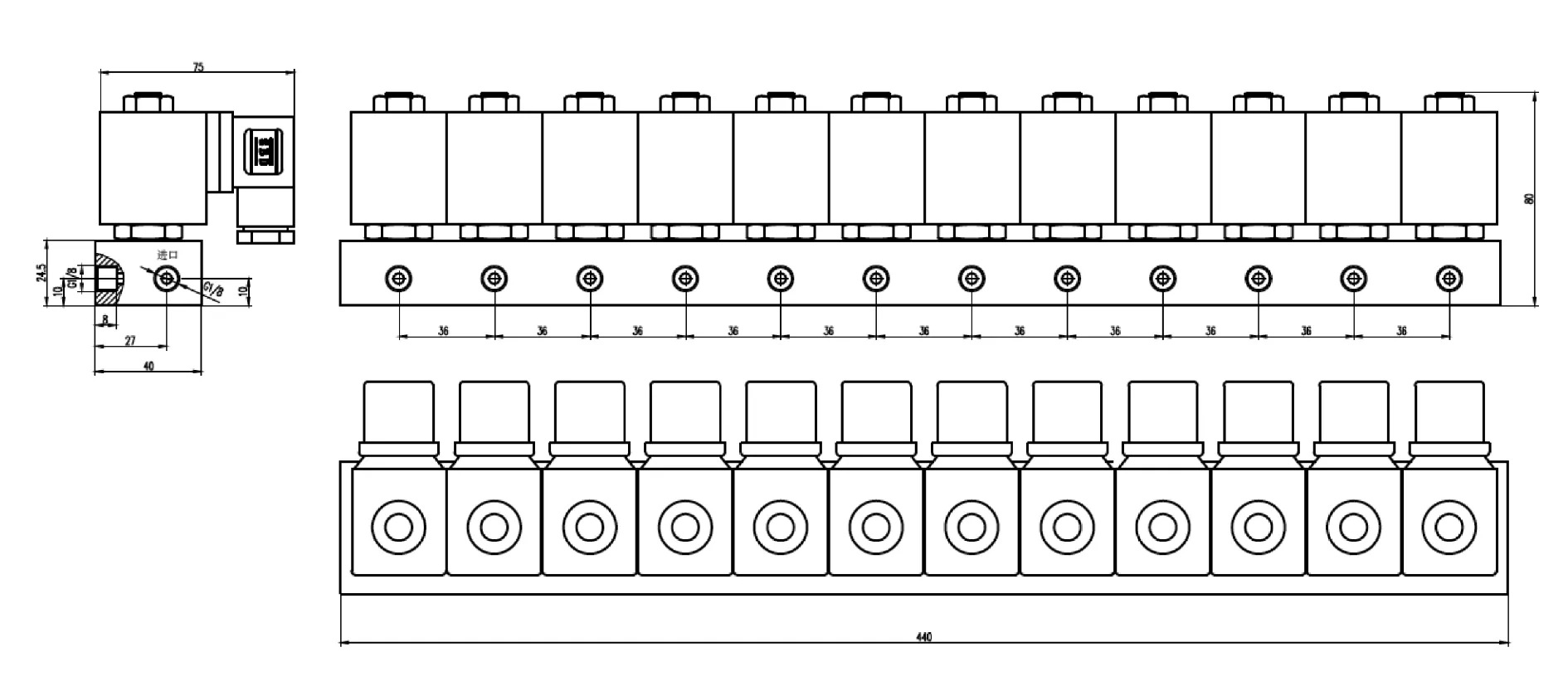
图5 多通道选通装置设计图
电磁阀设计耐压2MPa,即在电磁阀进水端和出水端压力不超过2MPa的情况下,电磁阀可以正常启闭,比系统设计预留了1倍的压力。同时,整个阀体需要密封放置在水下,需要对其进行密封处理。
2.4 过滤器设计
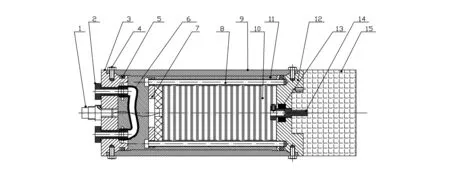
过滤器的设计,根据具体取样量的多少、粒径截取需求和滤样丰度等,来决定滤层的结构尺寸,并考虑滤膜孔径和材质的选取、滤膜防堵塞、滤液的转移提取以及滤膜与深海泵的匹配等问题。所设计的过滤器如图6所示。
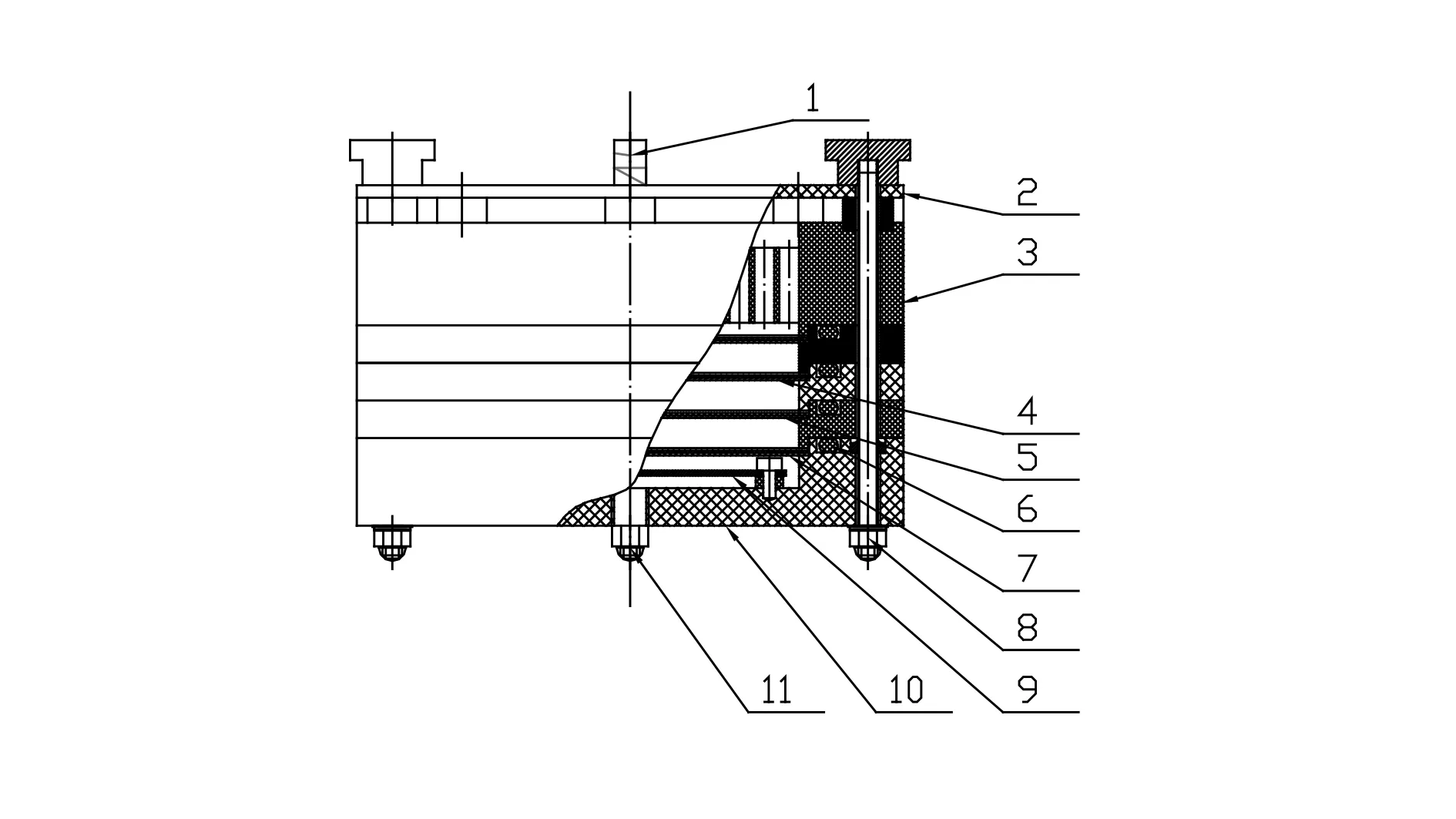
1.进水口;2.上盖;3.导流机构;4.I级滤膜及支撑网;5.II级滤膜及支撑网;6.III级滤膜及支撑网;7.O型圈;8.拉紧机构;9.流式扩散机构;10.底托;11.出水口图6 过滤器装置设计图
过滤装置包括上盖、导流机构、拉紧机构、流式扩散机构、底托和多级滤膜及支撑网,该导流机构和多级滤膜及支撑网位于上盖与底托之间,通过拉紧机构连接成一密闭的腔体,底托固定在安装架上;设置了上下叠放的三级滤膜及支撑网,可以放置不同种类的滤膜(如5μm、1μm和0.22μm)。导流机构的外围为导流壳体,中间均匀开设有多个导流孔;三级滤膜及支撑网中的支撑网位于外围,滤膜位于中间。导流壳体与上盖之间、导流壳体与I级滤膜及支撑网之间、三级滤膜及支撑网中的支撑网之间、Ⅲ级滤膜及支撑网与底托之间均通过O型圈实现密封。在最下面一级的滤膜及支撑网(即Ⅲ级滤膜及支撑网)的下方设有安装在底托上的流式扩散机构,该流式扩散机构可为孔径为50μm的过滤网。
2.5 中控装置设计
中控装置控制水下泵、流量计和组合阀等装置的启停,并读取记录流量和深度等参数。水下泵、流量计和组合阀等装置的启动依靠整个装置下水前的时钟设置,停止依靠下水前流量的设置。具体流程如图7所示。

图7 装置控制流程图
中控装置通过实时时钟定时启动,启动后设置开启初始阀门号n为1,即第一次打开阀门1号,依次打开深度计、流量计、n号阀门和水下泵,然后实时监控流量计是否达到预设流量。当流量达到预设流量后,依次关闭水下泵、阀门n、流量计和深度计,进行等待,到达预先设定的时间后,阀门号n增加1,再重新依次打开深度计、流量计、n号阀门和水下泵,然后实时监控流量计是否达到预设流量。当流量达到预设流量后,依次关闭泵、阀门n、流量计和深度计,等待预先设定的时间,依此类推,直到阀门号n大于11,系统进入节电模式,等待下一次通过实时时钟定时启动。定时启动的时间是每个小时中固定的分钟数,系统布放前需要预先设置预设流量和等待时间。中控装置硬件采用基于ARM11的1GHz的低功耗片上系统,外加一个可以提供定时启动和实时时钟的RTC芯片,通过片上系统的27个GPIO口控制继电器来控制11个阀门和流量计、深度计的开关,通过片上系统的2个串口来与流量计和深度计进行通信。中控装置工作状态下功耗在1.5W左右,并可以提供低功耗模式,低功耗模式下功率为10-6W。
2.6 装置集成
各部分完成后,配备电池和部件连接,制作密封舱体,对其进行封装,并由支撑架体来搭载各功能部件的载体,要满足如下基本条件:
(1)具有良好的搭载和扩充功能:根据不同的海水采样要求,可能需要搭载不同的分级过滤装置,这就要求支撑架体有一定的负载能力,同时拥有合适的功能部件安装位置,通信供电接口具有通用性,且有足够的数量等。
(2)保证传感器的测量精度:由于支撑架体是在运动中实时测量海洋环境要素,要保证测量的准确度。除了传感器自身具有较高的精度外,还要让其和被测要素充分接触,以便测量传感器能够快速实时准确地实现观测要素的测量。
(3)具有耐腐蚀的特性:由于支撑架体要长时间(3个月以上)持续在海上工作,腐蚀防护措施是必不可少的,这需要从材料的选择和防护方法上予以考虑。
(4)迎流阻力小:由于系统可能会在大海流作用下工作,为了保证其具有良好的抗流能力和水中迎流阻力小等特性,要求其具有流线型结构设计,最大限度地减小迎流面积。
3 海水综合原位自动过滤系统设计
拟构建一种多测点、多水层、多通道海水原位自动过滤方法,实现海水悬浮颗粒物的立体原位多时次获取,避除传统取样过滤方法费时费力和现代测量方法反演误差大与适用范围小的缺陷,以简约的方法实现海水悬浮颗粒物浓度的立体准确测量。
3.1 浮标式悬浮颗粒物多层原位过滤立体测量系统设计
根据分层立体观测的需要,设计在浮标锚系上自海面到海底分层敷设多个(3个以上)原位过滤取样装置,结合潮位对悬浮颗粒物的影响,每个原位过滤取样装置具有多通道(比如11通道),控制系统按时次分别选通一个通道进行悬浮颗粒物过滤,这样可满足多时次(如11时次)分别取样需求。据此搭建浮标式悬浮颗粒物多层原位过滤立体测量系统,如图8所示。
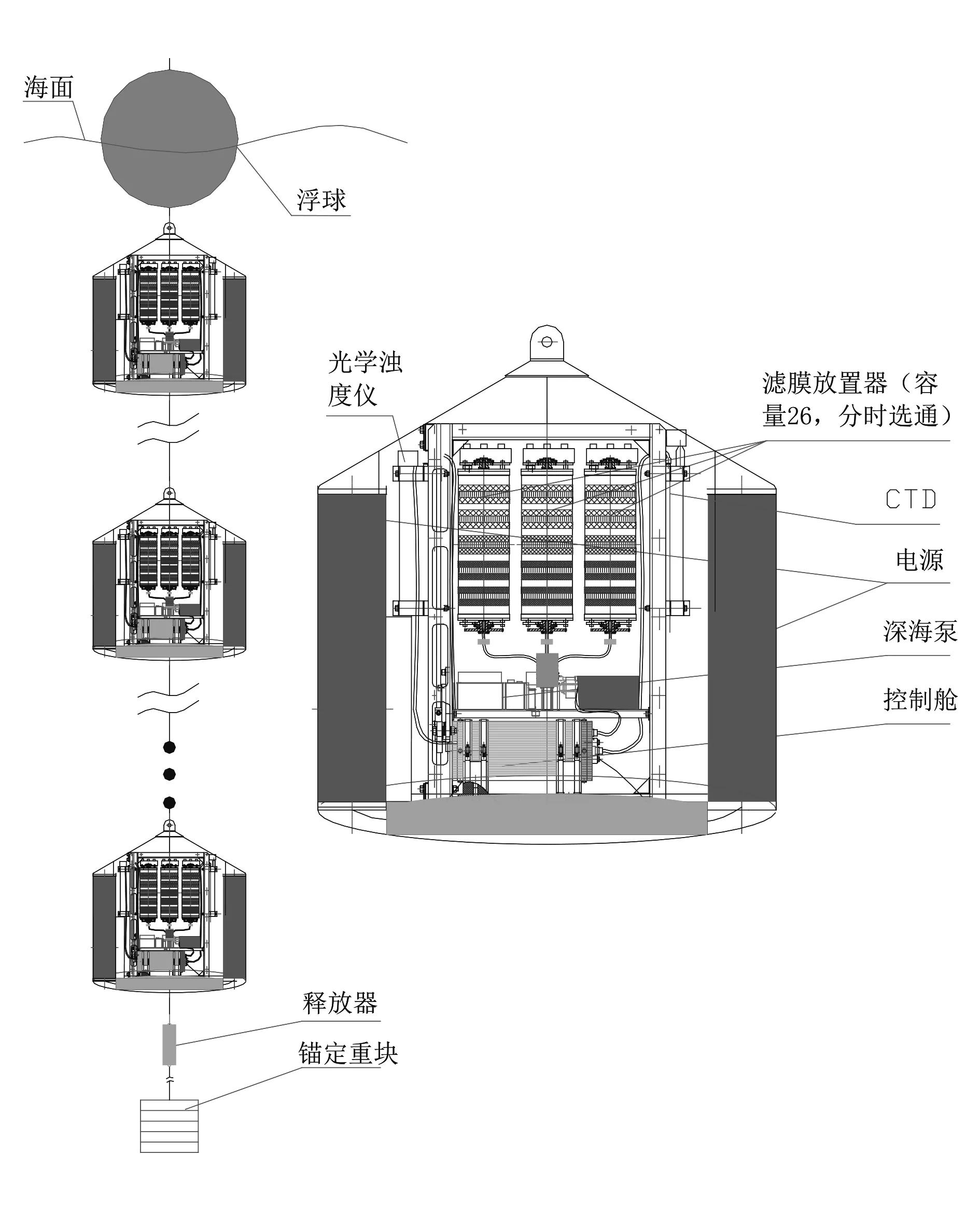
图8 悬浮颗粒物原位垂直立体过滤方案图
浮标锚泊系统设计由海面浮球、锚泊缆、释放器、钢丝绳、锚定重块和连接机构等构成,根据研究需要,在锚泊缆上分层敷设3个或3个以上悬浮颗粒物原位过滤装置,而后回收试验装置,取出滤膜进行称重等处理,获取该站点多个时次的悬浮颗粒物浓度数值,从而实现在某观测站点海水悬浮颗粒物的多层原位同步多时次测量。
3.2 综合原位过滤立体测量设计
若合理布设多个观测站点,则可实现某海域海水悬浮颗粒物的多站位、多层次、多时次的立体自动观测,如图9所示。

图9 特定海域海水悬浮颗粒物浓度立体测量方案图
如图所示,在海阳市核电厂址周边海域布设12个站位进行悬沙环境检测,通过对核电厂工程海区多断面的大、中、小潮全潮同步海水悬浮物测验,可以初步分析山东海阳核电厂工程海域悬浮颗粒物时空分布特征和泥沙运动规律,为水文、水工和环保等有关专业及其冷却水排放、泥沙冲淤等数学物理模型计算与试验提供基本资料。
4 总 结
作为全新的海水悬浮颗粒物浓度多时次取样方法,其准确性需要测定。后续在装置研制完成的基础上,将此原位过滤方法与最为准确的传统方法进行比测,即在同一观测站点进行海水悬浮颗粒物多层多时次原位过滤取样的同时,进行相同水层同步多个时次现场取水,然后回实验室后对水样进行过滤、称重、计算悬浮颗粒物质量浓度;将原位过滤、称重后计算的悬浮颗粒物浓度与传统方法进行比对,检测原位自动过滤水样获得悬浮颗粒物浓度的准确性。原位过滤方式作为传统测量方法的有益补充,通过水中悬浮颗粒物特性测试试验,分析原位过滤方式与实验室测量结果之间差异的原由,以确定原位过滤方式的实用性。
同时,进行多种悬浮颗粒物观测手段的比测试验。在原位过滤装置上安装光学浊度仪,在观测站点上布放声学多普勒剖面流速仪(ADCP)潜标,每个取样点次同步下放激光粒度仪(LISST)。除了较为准确的过滤方法外,同步实现光学、声学等多方式悬浮颗粒物浓度测量,综合比较多方式悬浮颗粒物浓度测量性能。针对光、声间接测量手段的缺陷,分析间接测量方式的校正方法,以实现海水悬浮颗粒物的多方案测量与比较,评价各种悬浮颗粒物测量方法的优劣。
猜你喜欢
幼儿100(2024年19期)2024-05-29 07:43:34
陶瓷学报(2020年3期)2020-10-27 02:08:12
Clinical Research Communications(2019年1期)2019-04-23 07:30:46
天然产物研究与开发(2018年5期)2018-06-13 03:23:54
环境保护与循环经济(2017年2期)2017-09-26 11:52:22
化工进展(2015年3期)2015-11-11 09:18:15
浙江大学学报(工学版)(2015年1期)2015-03-01 01:17:28
应用化工(2014年1期)2014-08-16 13:34:08
河南科技(2014年12期)2014-02-27 14:10:29
化工生产与技术(2014年3期)2014-02-27 13:41:43
