人工心脏提高主动脉瓣性能和血管搏动性的反馈控制
2020-08-14 08:34:02王珺玮蒋皓月
控制理论与应用 2020年7期
王珺玮,蒋皓月,王 宇
(1.大连理工大学电子信息与电气工程学部,辽宁大连 116024;2.大连理工大学光电工程与仪器科学学院,辽宁大连 116024)
1 引言
旋转式血泵(rotary blood pump,RBP)作为临床上一种常见的人工心脏,是治疗终末期心衰(绝大多数是左心室衰竭)的重要手段[1].RBP可将左心室的血流引入其辅助泵体,经血泵驱动血流进入主动脉,从而部分或完全代替心脏的泵血功能.尽管RBP已有几十年的发展并取得了长足的技术进步,但RBP在临床应用中仍会导致一些危及生命的不良事件或并发症.其中RBP的恒定血泵转速操作被认为是导致这些不良事件或并发症发生的重要因素之一.恒定RBP转速无法满足病人在不同活动状态和病理条件下(如高血压、低血压、血容量过高、血容量不足等)对于不同心输出量的要求[2].更为重要的是,恒速RBP产生的血流不能对血管产生明显的脉动血流刺激,并且会使血管的搏动性明显降低[3–4].临床上已经报道了因植入恒速RBP后降低的血管搏动性导致的各种并发症,如血液损伤、舒张期高血压、动脉静脉畸形、血管高阻抗等[5–6].另外,为满足心输出量要求而提高的RBP 转速会使主动脉压大于左心室压,最终导致主动脉瓣永久关闭,即不会出现主动脉压小于左心室压而使主动脉瓣打开的时刻.这种现象被认为是主动脉瓣关闭不全以及瓣膜融合等问题的主要原因[5–6].
针对上述问题,相关领域展开了诸多关于如何调节RBP的输出流量和转速以提高血管搏动性及间歇性打开主动脉瓣的研究,比较简单的是开环控制方法.其中,调节血泵流量是在保证平均流量的前提下,采用梯形波、正弦同步、时序流量调节等方法[7–8]产生脉动性血流和提高血管搏动性;而调节血泵转速是在保证平均转速的前提下,通过调整转速的幅值、频率,并使转速与心动周期同步、异步等方法来实现.而调节血泵转速的方法也已经成为相关领域关注的热点,这种方法不仅被应用于左心室辅助装置[9–10],也被应用于双心室辅助装置[11–12].然而开环控制方法的最大不足之处在于无法保证在病人大范围变化的日常活动和生理条件下自适应地提供合适的心输出量.
对此,研究人员设计了基于闭环反馈的控制方法,通过自适应地改变RBP转速来提高血管搏动性和间歇地开放主动脉瓣,并满足病人的心排量要求[13–14].但是少数方法集中于预防植入RBP后可能产生的抽吸(多由于泵转速过高使过量的血从心室抽出导致心室塌陷)和返流现象[15],对血管搏动性和心输出量的提高有限.并且上述所有开环和闭环的方法中,大多数只是以提高血管的搏动性为目的,并未充分考虑如何有效地使主动脉瓣能够打开和闭合.
本文提出了一种新颖的反馈控制方法,针对主动脉压与左心室压的实际差值∆P设定两个相互转换的高低参考值(∆PH/∆PL),采用增益调度比例积分(proportional integral,PI)控制器,使∆P 逼近其中一个参考值后立即向另一个参考值逼近,从而提高血管搏动性,间歇性地打开主动脉瓣,同时保证足够的心输出量以及不引起抽吸和返流现象的发生.本研究采用简易心血管系统和RBP的耦合仿真模型,在不同生理条件下对提出的控制方法进行检验.
2 方法
2.1 心血管系统和RBP的耦合模型
根据RBP在临床上的实际应用进行相关建模,即在心血管系统中将RBP从左心室连接至主动脉.本文所采用的模型已在之前的研究中被反复验证,用于RBP生理控制以及不良事件检测等各种算法的设计[16].图1所示为此耦合模型的等效电路形式.表1列出了模型中的6个变量及相关生理意义.表2列出了所有模型参数及相关生理意义.图1下半部分从左至右即x2至x3的路径分别代表左心房、左心室、主动脉、大动脉.其中:DM和DA分别代表二尖瓣和主动脉瓣,其导通和截止分别代表瓣膜的打开和闭合;最上部分经过RS从右至左回到左心房的路径则代表整个体–肺循环;从左心室到主动脉即x6通过的路径代表将RBP从左心室连接到主动脉.另外,本文的模型假设右心房、右心室和肺循环系统是正常的,即RBP对于这几部分的影响可以忽略不计.所以,此简易模型中的心血管系统分为5 个部分(表1 中的x1至x5),并与RBP组成6阶耦合模型.
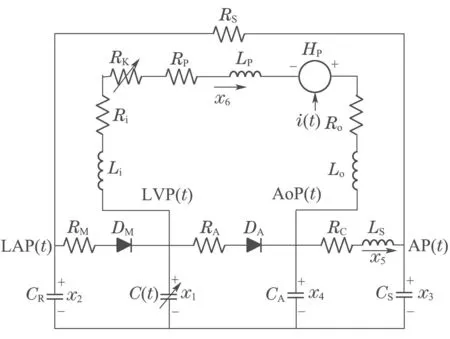
图1 基于心血管系统和RBP耦合模型的等效电路图Fig.1 Equivalent circuit diagram of the combined cardiovascular system and RBP model
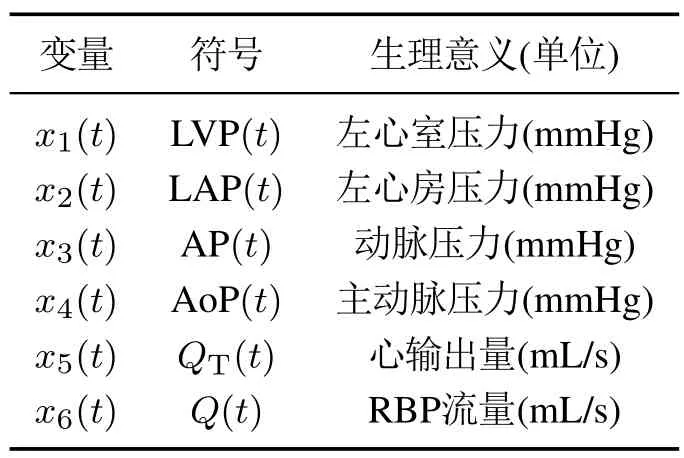
表1 心血管系统和RBP耦合模型的状态变量Table 1 State variables in the combined cardiovascular system and RBP model
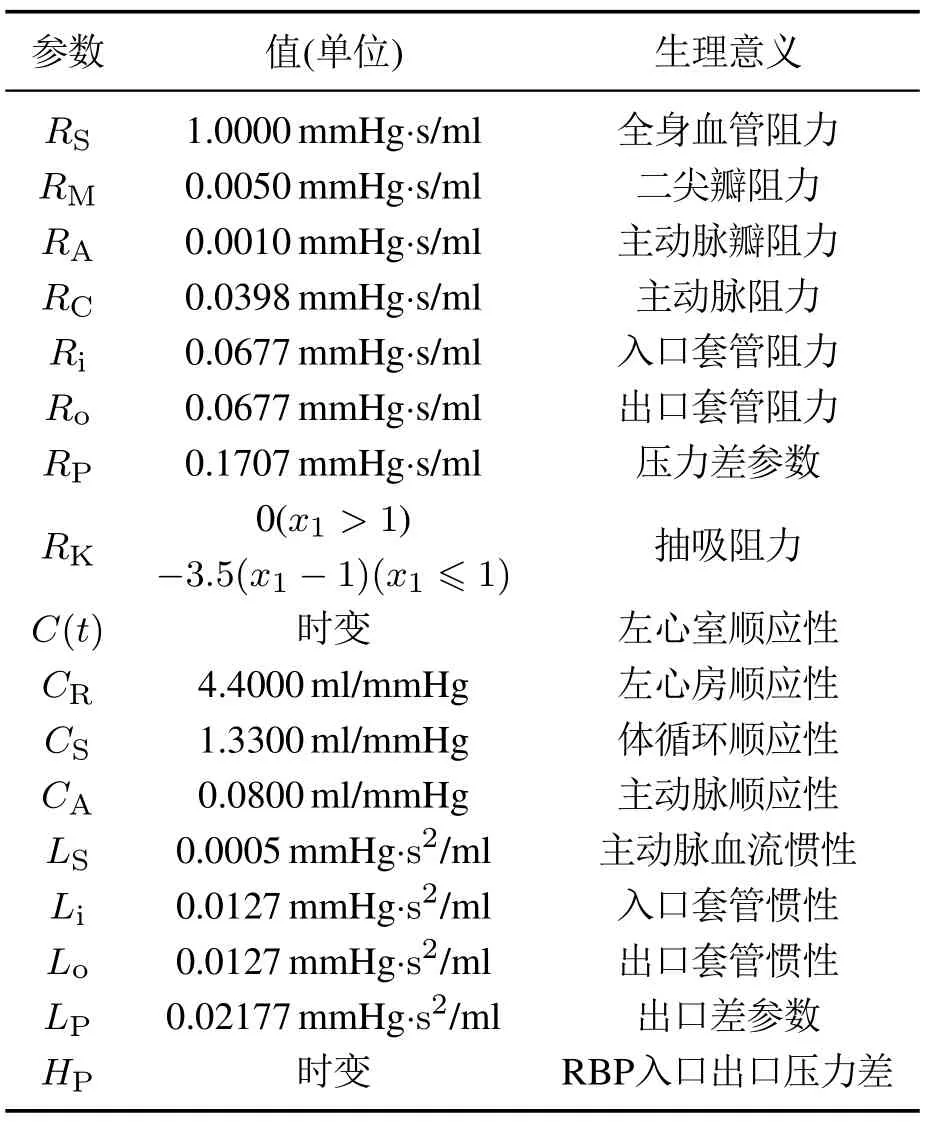
表2 心血管系统和RBP耦合模型的参数Table 2 Parameters in the combined cardiovascular system and RBP model
本文所采用的模型可用下列6阶微分方程表示:
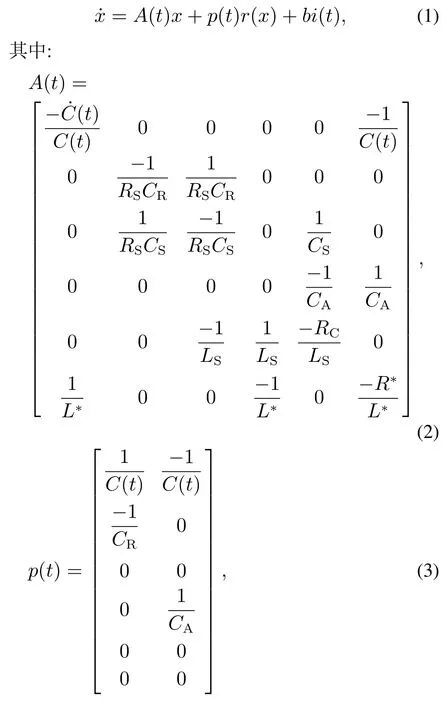
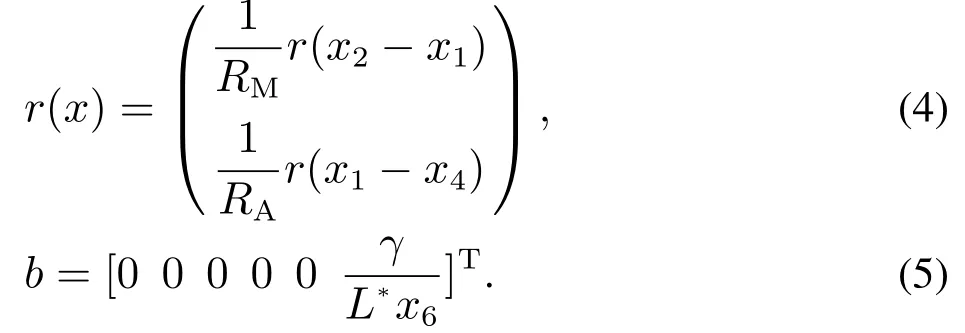
式中:R∗Ri+Ro+RP+RK,L∗Li+Lo+LP.模型中的输入为控制变量i(t),即式(1)中的RBP电流,而前文提到的RBP转速可用RBP电流和RBP血流量(表1中的x6)来表示:
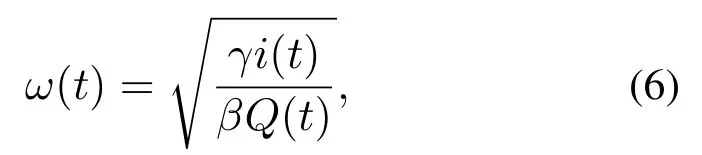
式中: ω(t)代表泵转速,Q(t)代表泵流量,γ和β均为常量.显然,当主动脉瓣永久闭合时,心输出量等于RBP血流量;当主动脉瓣能够正常打开/闭合时,心输出量等于RBP血流量与主动脉血流量之和.本文模型的所有参数和系统的验证均可从之前的相关研究中获得[15–16].
2.2 控制方法设计
研究发现,在病人各种活动状态下,保持主动脉压和左心室压差值(∆P)为常量的控制算法虽然会明显降低血管搏动性并永久关闭主动脉瓣,但却可以提供足够的心输出量,满足基于RBP生理控制的需求[17–18].因此,本文提出的具体控制算法是根据实际情况设定基于∆P的两个参考值:高参考值(∆PH)和低参考值(∆PL),即两个控制目标.实际∆P值可用压力传感器进行准确测量.另外,本文采用增益调度PI控制器,具体的控制目的是调整控制系统的输入i(t),使得当参考值为∆PH时,控制系统的输出即实际∆P值逼近∆PH,RBP流量增大并且主动脉压力明显大于左心室压力使得主动脉瓣关闭,此时左心室的负载减弱.而后控制系统将参考值由∆PH自动转换为∆PL,RBP 流量减少,此时主动脉压力小于左心室压力使得主动脉瓣短暂处于打开状态.因此,在每一次∆PH和∆PL相互转换期间,控制系统可以产生足够的主动脉脉压差,即明显提高血管搏动性,并且间歇性地打开主动脉瓣,同时可以为人体循环系统提供足够的生理灌注.而高低参考值∆PH和∆PL的转换方式为:仿真中初始参考值设为∆PH,若当前参考值与实际值∆P值之差的绝对值小于10 mmHg,则当前参考值立即转换为另一个参考值.采用增益调度PI控制器的主要原因在于这种控制器的设置只需要选择合适的控制器系数和合适的∆PH及∆PL.控制输入,即RBP电流根据下列控制律进行更新和修正:

式中:∆Pr代表∆P的参考值,即∆PH或∆PL,k1和k2是自定义的控制器系数.图2为设计的RBP反馈控制方法流程图[18].图中∆P是主动脉和左心室的压力差,可以通过使用压力传感器得到,∆PH和∆PL是两个设定的参考值,基于∆P实际值与∆PH或∆PL的误差,通过控制器来调节RBP电流使其大幅度的变化,进而显著地提高主动脉脉压差,并且产生足够的生理灌注.
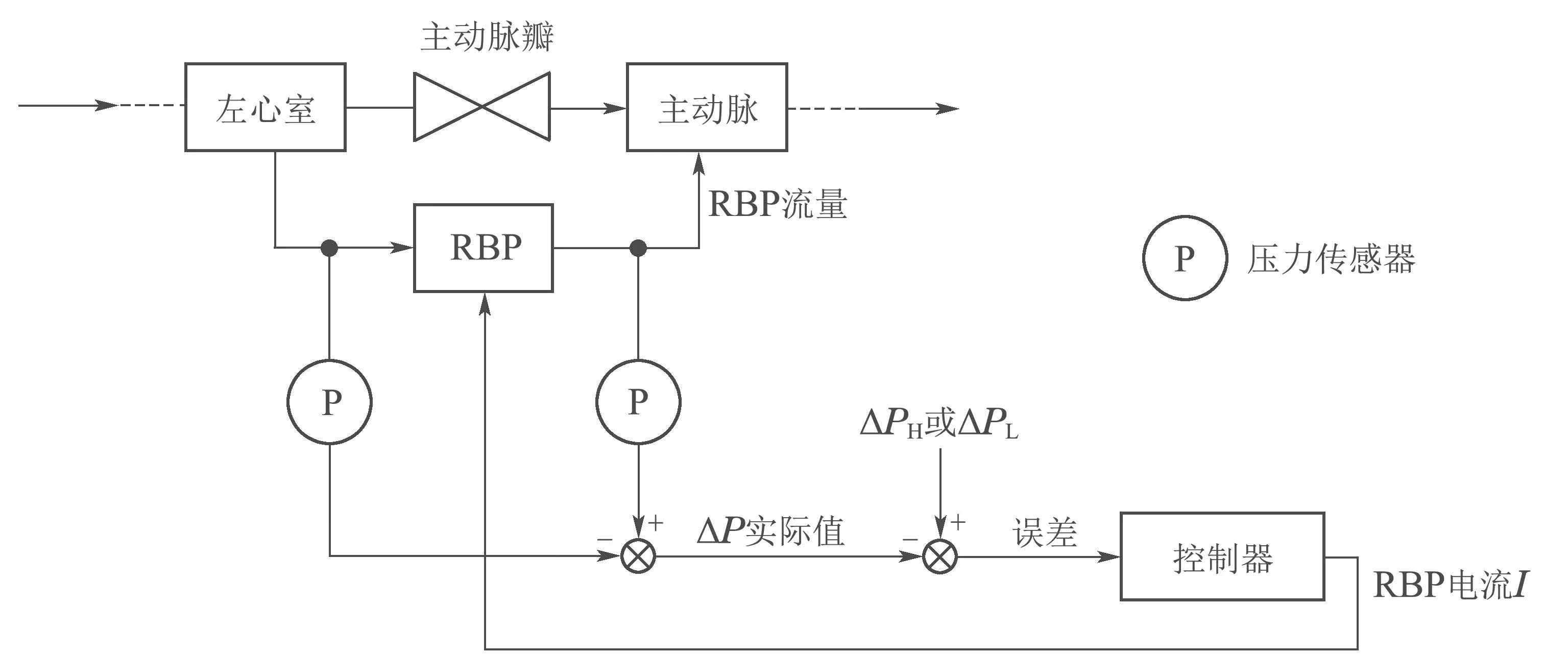
图2 提出的反馈控制算法流程图Fig.2 Flowchart of the proposed feedback control algorithm
本文将在模拟心衰病人静息状态(即基线状态)和轻度运动状态的条件下,对设计的控制方法的效果和鲁棒性进行评估.模拟的心率在静息状态下为75 次/min,轻度运动状态时为90 次/min[19].仿真开始之前假设无RBP辅助.t0时设定为舒张末期阶段,系统被给予RBP辅助支持,并且本文设定的高低参考值分别为∆PH110 mmHg以及∆PL40 mmHg.在所有测试条件下,控制器系数k1和k2的值均保持不变.待波形稳定后记录各种相关血流动力学参数,包括压力、血流量、容积.最后,将本文中所提出的控制算法性能与恒定RBP转速的控制算法性能进行了比较.
2.3 数据分析
本文将在所有仿真条件下计算各种血流动力学参数并分析其相关特征.用压力、血流量和容积计算分析以下具体血流动力学参数:心输出量;主动脉收缩压/舒张压、平均压;左心室收缩期、舒张末期、以及最大和最小压力;主动脉和RBP血流量等.另外,传统意义上血管搏动性被定义为主动脉脉压,即主动脉的最大收缩压与最小舒张压的差值[5].本文用主动脉脉压来量化血管的搏动性.抽吸现象被定义为左心室的瞬时压力不大于1 mmHg[15].返流现象指的是RBP血流量为负值.本文中所有的结果均通过仿真软件MATLAB(The MathWorks Inc.,Natick,MA,美国)得出,仿真所用台式计算机的配置为3.4 GHz英特尔i7–6700中央处理器及16 GB内存.
3 结果
表3列出了无RBP辅助支持的正常心脏、无RBP辅助支持的心衰现象、本文提出的控制算法以及传统的恒定RBP转速控制算法在静息状态和轻度运动状态下的各种结果比较.正常心脏在静息状态下的心输出量为5.14 L/min,主动脉压力为117/78 mmHg,平均主动脉压力为99 mmHg,主动脉脉压为39 mmHg.相应地,在轻度运动状态下的心输出量为6.26 L/min,主动脉压力为115/77 mmHg,平均主动脉压力为98 mmHg,主动脉脉压为38 mmHg.以上各种血流动力学指标均在正常范围内,并且主动脉瓣能够正常打开/闭合.
然而当心衰发生并且无RBP辅助支持时,与正常心脏相比,虽然主动脉瓣能够正常打开/闭合,但各种血流动力学指标均发生了明显的变化.此时静息状态下的心输出量降低至3.88 L/min,主动脉压力下降至93/62 mmHg,平均主动脉压力下降至78 mmHg,主动脉脉压减少到31 mmHg.而在轻度运动状态下的心输出量减少到4.74 L/min,主动脉压力降低至92/62 mmHg,平均主动脉压力下降至77 mmHg,主动脉脉压降低至30 mmHg.
图3所示为提出的控制算法与恒定RBP转速控制算法在静息状态下各种重要血流动力学指标的对比结果.图3(a)−(e)分别为基于本文提出的控制算法的压力、RBP流量、RBP转速、∆P以及RBP电流的结果;图3(f)−(j)分别为基于恒定RBP转速控制算法的相应结果.提出的控制算法将平均心输出量提高至5.54 L/min,明显高于无RBP 辅助支持时心衰情况的心输出量,也略高于正常心脏的心输出量.主动脉压力升高至126/83 mmHg,平均主动脉压力为105 mmHg,主动脉脉压为43 mmHg,均明显高于无RBP辅助支持时心衰情况的各种相关结果,也略高于正常心脏的各种相应血流动力学参数(表3).更重要的是,提出的控制算法能够使主动脉瓣间歇性地打开,即每3个心动周期打开一次(图3(a)).相比较而言,虽然恒定RBP转速控制算法也能够明显提高心输出量以及平均主动脉压力并且与基于提出的控制算法得到的结果相比相差无几,但是却极大降低了血管搏动性(仅为8 mmHg).另外由于此时主动脉压力永久大于左心室压力,主动脉瓣也将会永久关闭(图3(e)).抽吸和返流现象在上述两种算法中均未发现.
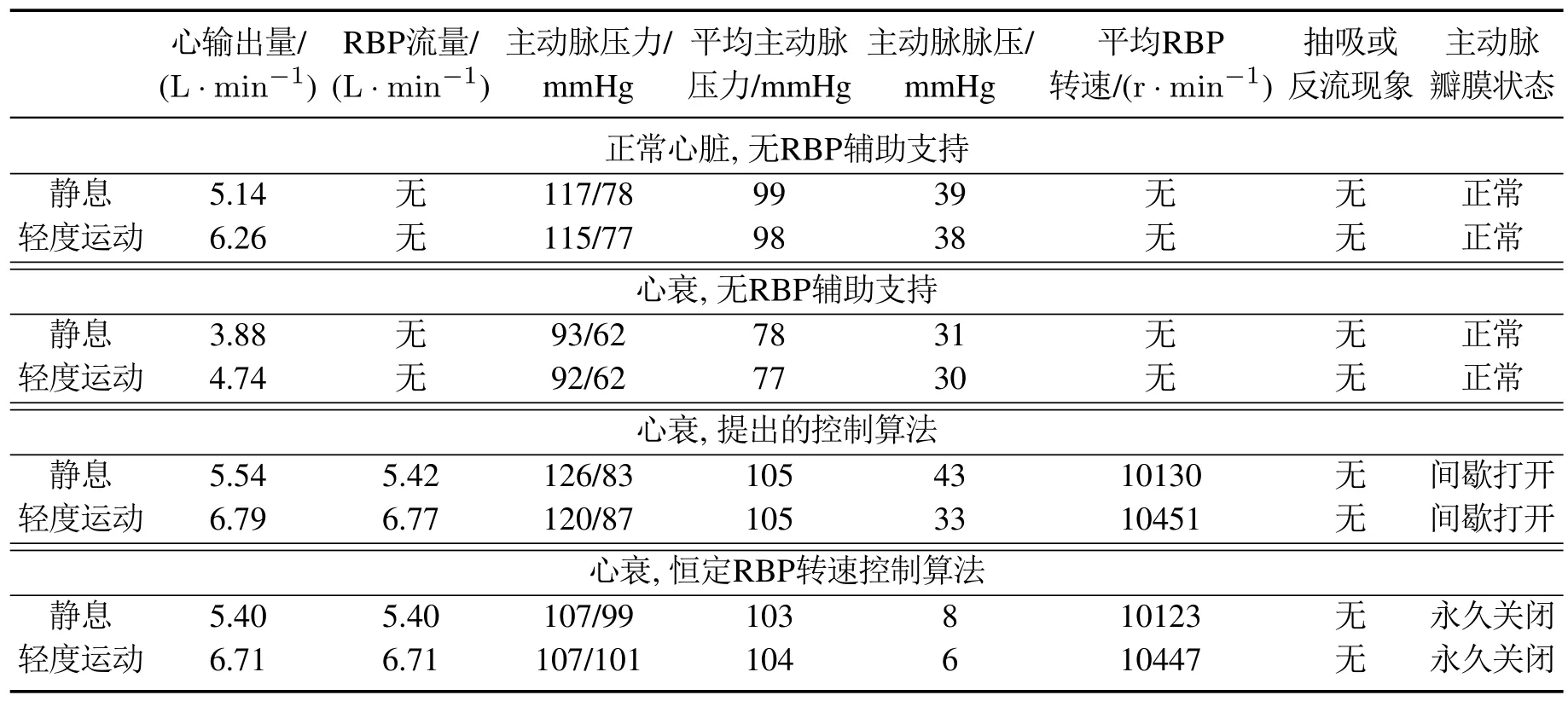
表3 无RBP辅助支持的正常心脏、无RBP辅助支持的心衰现象、提出的控制算法以及恒定RBP转速控制算法在静息(基线)状态和轻度运动状态下的结果比较Table 3 Comparison of results of the normal heart without RBP assistance,heart failure without RBP assistance,the proposed control algorithm,and constant RBP speed control strategy under rest(baseline)and light exercise conditions


图3 本文提出的控制算法和恒定RBP转速控制算法在静息状态下的对比Fig.3 Comparison of the proposed control algorithm and constant speed control algorithm under rest condition
图4所示为设计的控制算法和恒定RBP转速控制算法在轻度运动条件下各种结果的对比(每个子图的含义均与图3对应的相同).与图3的趋势相同,与无RBP辅助支持时的心衰情况相比,设计的控制算法可明显提高平均心输出量(4.74 L/min至6.79 L/min)、主动脉收缩压/舒张压(92/62 mmHg至120/87 mmHg)以及平均主动脉压力(77 mmHg至105 mmHg),并略提高主动脉脉压(30 mmHg至33 mmHg),并且除主动脉脉压外其他指标均略高于正常心脏的各种相应结果(表3).
另外,提出的控制算法能够使主动脉瓣每5个心动周期间歇性地打开一次(图4(a)).而基于恒定RBP转速的控制算法虽然使得到的心输出量和平均主动脉压力几乎与基于提出的控制算法得到的结果相同,然而血管搏动性(仅为6 mmHg)却明显下降,并且由于此时主动脉压力永久大于左心室压力,主动脉瓣永久关闭(图4(e)).抽吸和返流现象在上述仿真实例中均未发现.
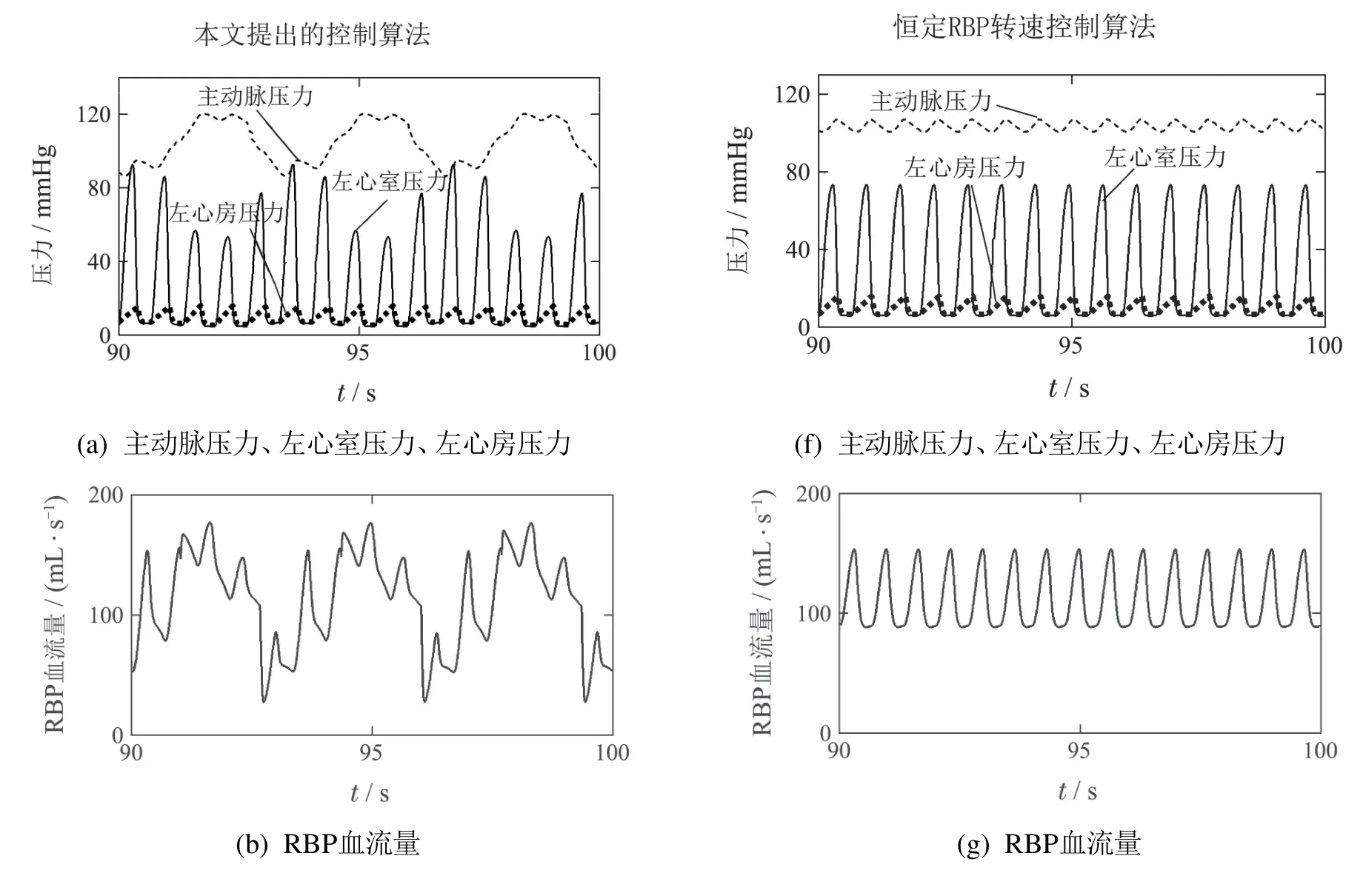
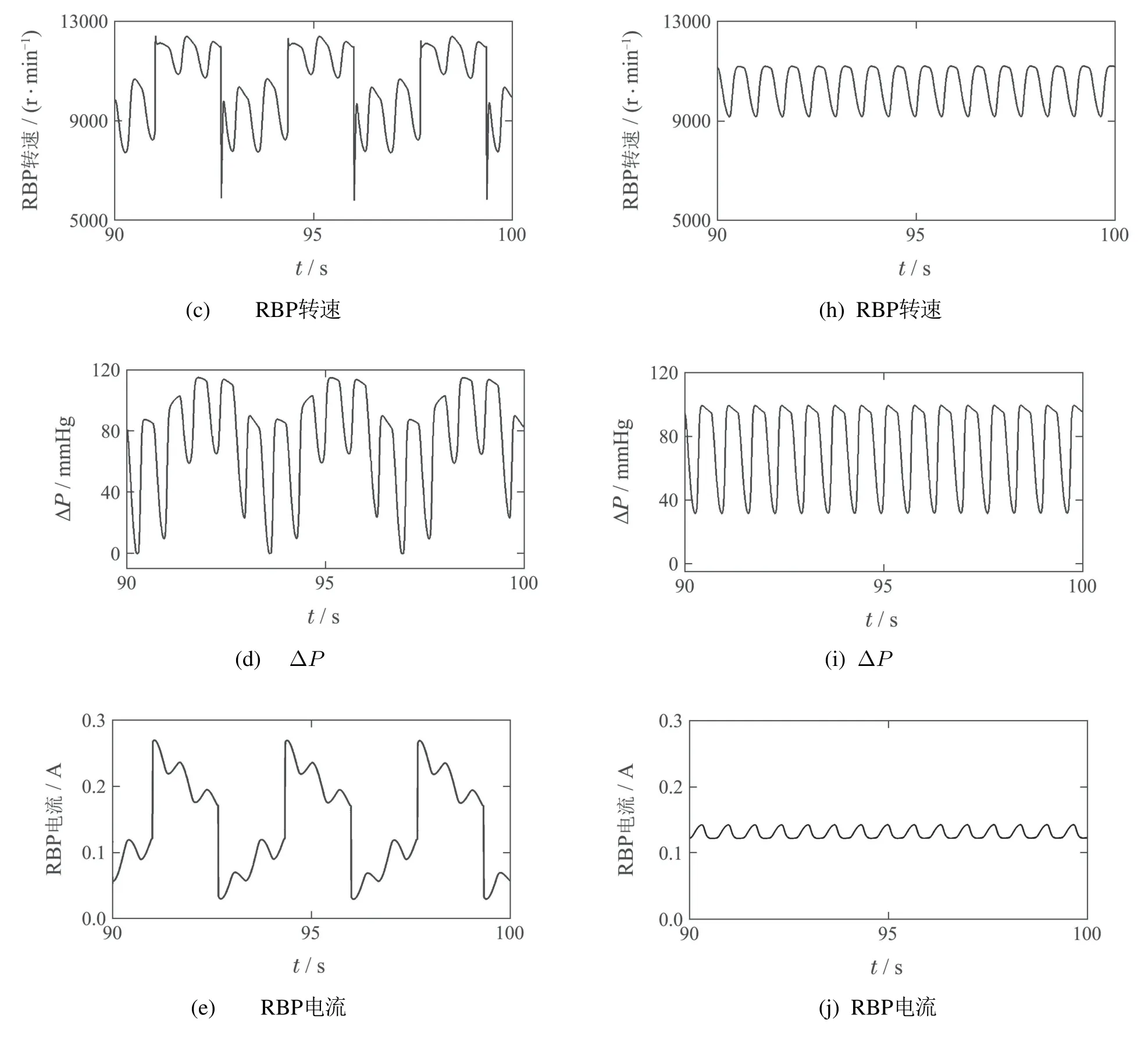
图4 本文提出的控制算法和恒定RBP转速控制算法在轻度运动条件下的对比Fig.4 Comparison of the proposed control algorithm and constant speed control algorithm during light exercise condition
此外,图5所示为生理状态由轻度运动变为静息时设计的控制算法(t100 s时生理状态改变)和恒定RBP转速控制算法(t200 s时生理状态改变)各种结果的对比(每个子图的含义均与图3及图4对应的相同).两种方法均未发现抽吸和返流现象,生理状态变化后各种波形均能够迅速趋于平稳,并且生理状态发生变化前后的各种血流动力学参数均与前述结果保持一致.
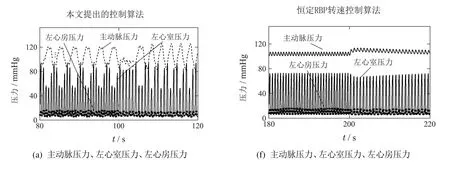
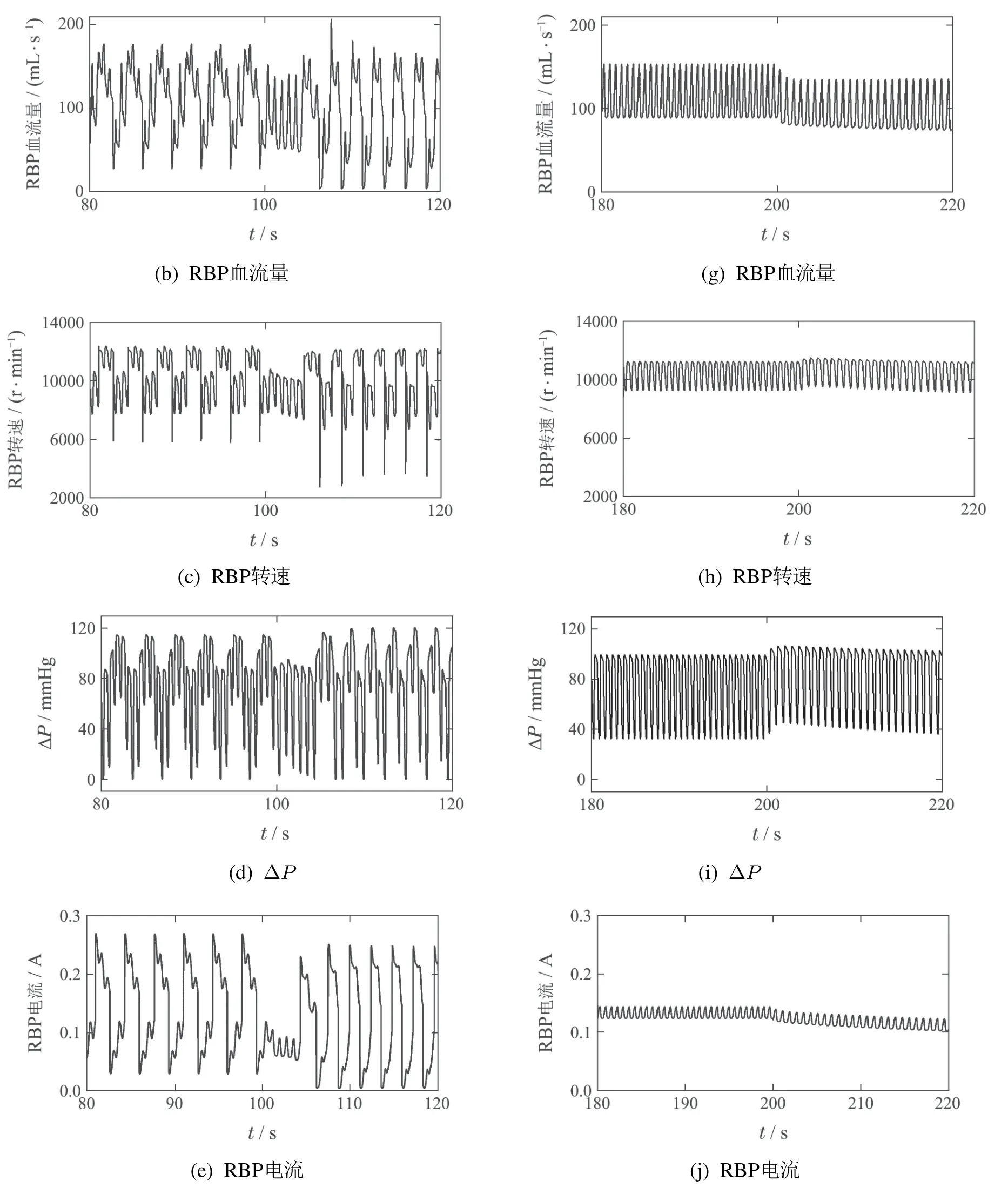
图5 本文提出的控制算法和恒定RBP转速控制算法在生理条件由轻度运动向静息转变时的对比Fig.5 Comparison of the proposed control algorithm and constant speed control algorithm during the physiological condition
4 讨论与分析
本文通过计算机仿真测试了一种新的控制算法.仿真中使用了一种RBP,但是设计的控制系统在适当地调整了控制器系数后可在临床上应用于任意类型的RBP.仿真结果表明,在静息以及轻度运动的情况下,提出的控制算法均可以间歇性地打开主动脉瓣,即使少量血流经打开的主动脉瓣流入主动脉,同时提高主动脉根部的搏动性.上述研究目的通过设定主动脉与左心室压力差∆P 的两个不同参考值∆PH和∆PL,采用增益调度PI控制器,使实际∆P值逼近一个参考值后立即向另一个参考值逼近来实现.
根据临床研究,由于RBP的辅助支持,特别是在恒定RBP转速的模式下,减少的血管搏动性对主动脉血管、主动脉壁、以及平滑肌细胞均有负面影响[20–21].这一现象也与一些不良事件及并发症有关,包括动静脉畸形、出血性脑卒中、以及消化道出血[5–6].虽然很多相关文献所设计的控制器均能够提供足够的生理灌注以及不产生抽吸和返流现象,然而本文提出的控制算法除这些目的以外还可以明显增加血管搏动性,预防或减轻上述与降低的血管搏动性相关的不良事件.另外,主动脉瓣的正常开放和闭合对于植入RBP的心衰病人是极其重要的,它可以预防主动脉瓣关闭不全,降低主动脉瓣根部再狭窄的可能性[22].主动脉瓣在打开和关闭之间的正常切换也与最大程度降低左心室负荷进而减少心脏的每搏作功,以及增加左心室负荷之间的转换相关,进而可以逐渐地提高心肌功能.本文所提出的控制算法同样可以实现上述的切换功能.换句话说,这样的控制系统将确保病人得到RBP的全部或部分辅助支持.因此可以降低心肌萎缩的风险,甚至使心肌功能得到恢复[3,6,9].
通过开环方式周期性地控制血泵转速是提高主动脉搏动性和打开主动脉瓣的传统方法.Tuzun等通过动物模型,利用Jarvik 2000这种旋转式血泵,采用间歇性降低血泵转速的方式实现了上述目的[23].他们的实验结果证明了即便是在相对较低的心排量以及主动脉瓣完全关闭的状态下,通过每分钟暂时降低血泵转速10 s的方法便可以在此段时间内打开主动脉瓣,使左心室的血液通过主动脉瓣射入主动脉.这种方法可以使得主动脉瓣在1 min的一个周期内打开6次.然而这种方法的最大缺点在于无法在病人大范围变化的日常活动和生理条件下自适应地调节血泵转速,也无法满足变化的心排量要求.而本文设计的控制算法不但可以在每分钟内更频繁地打开主动脉瓣,其中静息状态下每分钟主动脉瓣打开20余次(图3(a)),轻度运动状态下每分钟主动脉瓣打开近20次(图4(a)),并且可以在病人生理状况发生变化时自适应地满足心输出量的变化要求(表3,图5).另外,通过对比图3−5中的(c)和(h)可以看出,设计的控制算法的泵速变化是周期性的,但此周期性变化的频率明显慢于恒速算法.从图中也可看到,提出的控制算法每隔几秒钟会周期性地造成RBP转速的瞬时巨大改变,这是由于相应时间内系统的输入即RBP电流的瞬时改变造成的,属于控制器的设计问题.本文通过仿真得到了比较满意的结果,然而该瞬时速度变化对系统安全性造成的风险以及控制器的优化设计需要将来通过离体实验和动物实验进一步验证.
此项研究的另一关键性问题是当控制输入过低时可能会导致返流现象;当控制输入过高时可能会导致抽吸现象.有研究表明,在传统的恒定RBP转速控制算法下,如果在日常生活中病人的活动状态发生改变,比如咳嗽、瓦氏呼吸(Vasalva Maneuver)、突然活动以及活动中突然停止运动等,则很容易导致抽吸和返流现象[24].一些研究中通常通过设定RBP的最低血流量参考值来防止返流现象,并且通常在控制系统中加入抽吸检测算法来预防抽吸现象.然而抽吸检测算法的加入会增加整体控制算法的复杂度,并且大多数实验和研究证实其设计的算法并不能完全预防抽吸现象.相比较而言,本文设定了控制输入的最小值来防止返流现象,并且在轻度运动条件下并未用到此项设定;另外,本文设计的控制算法中并未加入额外的抽吸检测算法,所有仿真测试在满足提高血管搏动性和间歇打开主动脉瓣的同时均未发现上述现象(表3).本研究采用高、低参考值的最主要目的是要产生接近于正常的主动脉脉压.高低参考值(110 mmHg和40 mmHg)的设定依据在于要使系统同时满足:产生接近于正常的主动脉脉压值、足够的心输出量,以及不引发抽吸和返流现象,因为高参考值过高会产生抽吸现象[25],而低参考值过低则有可能产生返流现象.因此,本文在选取高低参考值时已经保证了结果无抽吸和返流现象.
本文的研究通过计算机仿真得到了初步结果.显然,基于实验数据或临床数据得出的结论将更有说服力,因为计算机仿真无法取代离体实验或动物实验的重要性和意义,也不能够重现所有预期的临床效果.例如,本文所采用的心血管系统假设右心房和右心室以及肺循环系统是正常的,因此认为它们对左心室心衰的影响可以忽略不计,并且假设了心血管系统模型中的参数为集总参数、血流为牛顿液体.计算机仿真和数学模型也无法模拟与心血管系统相关的神经体液反应、组织重塑以及遗传表型的变化[26].更重要的是,仿真结果中给出了主动脉瓣膜间歇性地打开的频率,然而仅仅分析这一频率是不够的,因为瓣膜开启的持续时间和最大截面积也可能随着很多因素而发生改变并且直接影响到通过主动脉瓣的血流量.本研究中也并未面向可能出现抽吸或返流的情况对控制器做进一步的测试.这些也是此项研究将来要通过离体实验和动物实验要解决的主要问题.尽管本文还存在着一定的不足和局限性,但是本文通过模型和仿真说明此种控制方法是可行和有效的,可为今后RBP的改进和设计提供可靠的平台,具有一定的临床应用价值.另外,本文中对主动脉和左心室压力的测量是基于压力传感器来实现的.到目前为止,临床上还没有可靠的、可长期使用的血压传感器可供选择[27].然而,目前关于这种血压传感器的许多研究正在进行中,并在文献中报道了比较满意的结果[28].因此,相关研究中使用这种传感器是合理的.一些研究中也报道过利用某些RBP的内在参数来准确估算∆P的方法[26],这也是此项研究将来要解决的另一问题.
5 结论
本文提出了一种基于RBP的反馈控制算法,用于间歇性地打开主动脉瓣、提高血管搏动性、同时满足心衰病人对于不同生理条件下心输出量的要求以及不引发抽吸和返流现象.仿真结果表明,设计的方法可以有效地实现上述研究目标.该方法的实际临床效果仍然需要利用离体实验和大型动物实验来进一步验证和改进.
猜你喜欢
人民黄河(2023年9期)2023-09-12 04:24:26
当代水产(2020年2期)2020-03-17 06:57:06
小资CHIC!ELEGANCE(2019年40期)2019-12-10 09:12:42
家庭科学·新健康(2018年5期)2018-06-08 14:08:22
小小艺术家(2017年8期)2018-01-26 13:15:10
中国当代医药(2015年7期)2015-03-01 02:01:12
机械制造与自动化(2014年1期)2014-03-01 04:21:41
家庭医药·快乐养生(2013年9期)2013-04-29 23:27:58
中国实用医药(2012年25期)2012-08-15 00:42:18
河北医科大学学报(2011年9期)2011-03-25 10:17:14