
直流电源监控器故障解析
2020-08-11 08:49杨伦
装备维修技术 2020年34期
关键词:故障树


摘 要:针对电源监控器的故障现象,展开故障源理论的分析,列出故障树并逐项排查,從而实现故障的定位。故障定位后还需要进行故障的复现,以验证定位的准确性。然后提出解决问题的方法,并展开验证,同时做解决措施的影响分析1,才最终完成故障的解决。
关键词:异常复位;故障树;故障复现;反向尖峰电压;泄放二极管
电源系统是飞机供电系统的重要组成部分,飞机在地面进行维护、检修等时常需要从地面向机上提供电源,电源监控器就是介于地面电源与机上电网之间的一个电源保护装置,通过监测地面电源的品质,如过压/欠压,实现对机上用电设备的保护。完善电源监控器的设计,对于保护机上用电设备具有重要的意义。本文主要对电源监控器异常复位的故障进行了实例分析,遵循故障归零的程序方法,提出有效的改进措施。
1 概述
1.1电源监控器
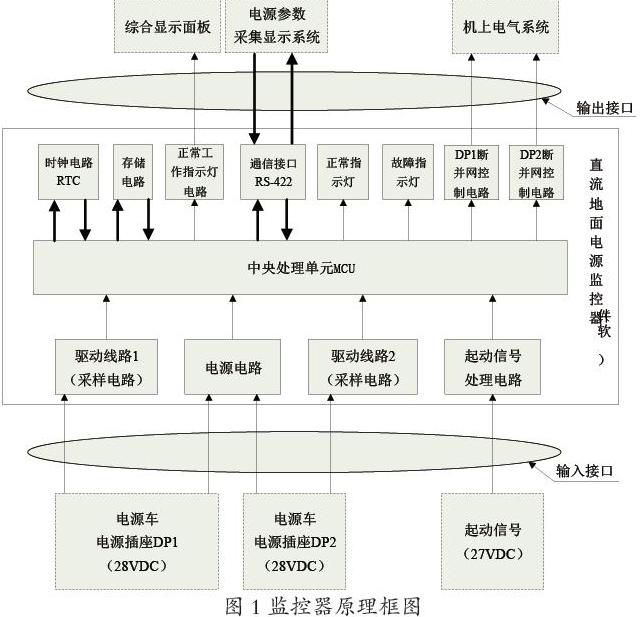
电源监控器(以下简称监控器)属于机上电源系统,其功能是当地面电源正常时,监控器控制直流电源接触器导通,将外部电源接入机上电网;当地面电源不正常时,监控器不接通直流电源接触器,使外部电源不能接入机上电网;当接入机上电网的地面电源品质发生变化且超出要求时,监控器控制直流电源接触器断开,将地面电源与机上电网脱开。监控器原理框图见图1。
1.2故障现象
在使用地面蓄电池电源车(CT-2)给机上设备供电时,随着电源车电量的消耗,其供电电压出现欠压(低于20.5VDC)时,监控器应以欠压为判据,切断电源车向机上电网供电,并保持自锁状态,即在监控器重新上电复位前维持机上电网断电状态。
但实际情况是该监控器切断电源车向机上电网供电后,并没有保持自锁状态,约3s后电源车电压恢复至23VDC左右时,监控器控制直流电源接触器导通,重新向机上电网供电,然后电源车电压因再次接入负载而很快降至欠压状态,监控器继续切断电源车向机上电网供电,依然是约3s后电源车重新并网,故障现象重复出现。
2 故障定位
2.1问题排查
监控器正常工作时,其状态指示绿灯亮,状态指示红灯灭。在上述故障现象发生时,观察到监控器状态指示红灯和状态指示绿灯出现同时闪亮的情况,该现象只有监控器正常上电启动或者监控器复位时才会出现,而在上述故障过程中,监控器一直未断电,故排除监控器正常上电启动导致的指示灯闪亮,从而判断监控器有异常复位情况发生,可能是监控器在判定电源车欠压故障并切断外部电源向机上电网供电瞬间,内部电路出现电压波动干扰,导致监控器自身出现异常复位现象。
监控器自身的复位是由内部主控制芯片主导的,故根据该主控制芯片复位源分析,列出监控器自身异常复位的故障树,并对故障树的底事件展开逐一分析排查。
主控制芯片复位电路原理图见图2,故障树见图3。
监控器异常复位各底事件排查结果如下:
X1:上电/掉电复位
监控器的正常工作电压范围为:(7~50)VDC,在飞机使用地面电源CT-2供电过程中,供电电源CT-2在监控器异常复位发生过程中电源电压未出现工作电压超出监控器的工作电压之外的现象,即在异常复位发生期间监控器未发生重新上电或者掉电现象,因此X1(上电/掉电复位)底事件可以排除。
X2:外部/RST引脚复位
/RST引脚为内部控制芯片C8051F020复位引脚,低电平有效,产生系统复位的最小/RST 低电平时间为10ns,如果该管脚在监控器控制外部电源欠压断电瞬间产生的外部低电平干扰大于10ns时,芯片可能产生异常复位,因此X2(外部/RST引脚复位)底事件待查。
X3:软件强制复位
在软件中向芯片SWRSEF位写‘1将强制产生一个上电复位,软件中未使用该复位功能,因此X3(软件强制复位)底事件可以排除。
X4:时钟丢失检测器复位
时钟丢失检测器实际上是由 MCU 系统时钟触发的单稳态电路。 如果未收到系统时钟的时间大于 100 微秒,单稳态电路将超时并产生一个复位。 在发生时钟丢失检测器复位后, MCDRSF标志(RSTSRC.2)将被置‘1 ,表示本次复位源为 MSD;否则该位被清‘0。/RST 引脚的状态不受该复位的影响。把 OSCIN 寄存器中的 MSCLKE 位置‘1将使能时钟丢失检测器,软件中未OSCIN 寄存器中的 MSCLKE 位置‘1,即未配置使用该复位功能,故X4(时钟丢失检测器复位)底事件可以排除。
X5:比较器0复位
向 C0RSEF 标志(RSTSRC.5)写‘1可以将比较器 0 配置为复位源。应在写 C0RSEF之前用 CPT0CN.7(见图 8.3)使能比较器 0,以防止通电瞬间在输出端产生抖动,从而产生不希望的复位。比较器 0 复位是低电平有效:如果同相端输入电压(CP0+引脚)小于反相端输入电压(CP0-引脚) ,则 MCU 被置于复位状态。在发生比较器 0 复位之后,C0RSEF 标志(RSTSRC.5)的读出值为‘1,表示本次复位源为比较器 0;否则该位被清‘0。/RST 引脚的状态不受该复位的影响。软件中向 C0RSEF 标志(RSTSRC.5)写‘1,即未配置使用该复位功能,因此,X5(比较器0复位)底事件可以排除。
X6:外部 CNVSTR 引脚复位
向 CNVRSEF 标志 (RSTSRC.6) 写 ‘1 可以将外部 CNVSTR 信号配置为复位源。 CNVSTR信号可以出现在 P0、P1、P2 或 P3 的任何 I/O 引脚,见“17.1 端口 0 – 端口 3 和优先权交叉开关译码器” 。注意:交叉开关必许被配置为使 CNVSTR 信号接到正确的端口 I/O。应该在将CNVRSEF 置‘1之前配置并使能交叉开关。当被配置为复位源时,CNVSTR 为低电平有效。在发生 CNVSTR 复位之后,CNVRSEF 标志(RSTSRC.6)的读出值为‘1 ,表示本次复位源为 CNVSTR;否则该位读出值为‘0 。/RST 引脚的状态不受该复位的影响。软件中未向 CNVRSEF 标志 (RSTSRC.6) 写 ‘1,即未配置使用该复位功能,因此,X6(外部 CNVSTR 引脚复位)底事件可以排除。
X7:看门狗定时器复位
软件中使用看门狗定时器复位功能,看门狗定时设置时间约为87ms,在程序运行异常时,看门狗定时器超时,监控器会出现芯片复位,监控器软件程序经过第三方测评,在测评未发生过因软件程序运行异常导致看门狗定时器超时复位的现象,而且本次故障多次重复发生,非偶发情况。因此,X7(看门狗定时器复位)底事件导致监控器异常复位的概率非常小,基本排除。
2.2排故结论及问题定位
总结排除故障树分析情况,监控器异常复位原因由于内部控制芯片C8051F020复位管脚/RST受到低电平干扰导致芯片复位的概率最大。
为了准确定位监控器异常复位原因,在控制芯片C8051F020复位管脚/RST處进行测试:模拟地面电源欠压故障,使监控器通过控制输出端AO1和AO2断开中间继电器,紧接着后端直流接触器也会断开,在接触器断开瞬间用示波器测试捕捉该复位管脚处是否存在低电平干扰。
经示波器测试捕捉,发现在复位管脚/RST处存在一个约96ms的低电平干扰(C8051F020的/RST复位时间只需10ns),在此干扰下监控器控制芯片C8051F020发生了复位,测试捕捉图片见图4,故可以定位监控器异常复位的原因是由于内部控制芯片C8051F020复位管脚/RST受到低电平干扰。
3 机理分析
监控器控制端输出Ao1和Ao2分别控制两路中间继电器,进而控制机上直流接触器导通,实现地面电源向机上电网的并网供电。当地面电源出现过压或欠压故障时,监控器通过Ao1和Ao2控制中间继电器和直流接触器断开,地面电源与机上电网脱开。由于直流接触器为感性负载,在断电瞬间会产生一个的很强的反向尖峰电压,见图4,该反向尖峰电压将电源地电平瞬间拉低,主控制芯片信号地处也在此瞬间产生一个反向电动势,导致主控制芯片C8051F020的复位管脚/RST处产生瞬时低电平干扰,电路图见图5。
4 故障复现
在产品原测试平台基础上增加后续中间继电器和直流接触器,并与电参系统交联,使用大功率电源模拟地面电源,搭建出地面试验环境,模拟地面电源过压、欠压故障,在两种故障情况下均实现了故障复现。
在模拟地面电源过压、欠压故障时,检测主控制芯片C8051F020的/RST复位管脚处电平变化情况,在直流接触器断电瞬间产生的反向尖峰电压及/RST复位管脚处低电平干扰继续出现。
5 采取的措施及验证
5.1采取的措施
监控器异常复位是由于控制输出端连接的机上中间继电器、直流接触器在断电瞬间产生的反向尖峰电压干扰到监控器内部主控制芯片C8051F020的/RST复位引脚所致,针对该原因在监控器输出控制端Ao1和Ao2上对地反向并联泄放二极管(型号2CZ5806)。
5.2地面/机上试验验证
在地面试验环境下进行措施有效性验证,监控器在地面电源过压、欠压时异常复位现象消失。
地面试验环境中措施有效性验证后,又开展了机上措施有效性验证,监控器在地面电源过压、欠压时异常复位现象也消失。
5.3更改影响分析
a)理论分析
在监控器输出控制端Ao1和Ao2上对地反向并联泄放二极管(型号2CZ5806),Ao1和Ao2上控制输出端直接连接后续继电器线圈,对地并联泄放二极管不影响正常输出控制电平,该更改措施不会对后续电路造成影响。二极管2CZ5806参数见表1。
b)更改试验验证
对监控器进行硬件设计更改,将更改后的产品进行高低温工作、高低温贮存、振动、冲击、加速度试验验证。经过上述试验验证后,监控器功能正常。
6 结语
按照故障归零的程序方法,对电源监控器机上使用时出现异常复位故障问题的归零定位准确、机理清楚,采取的改进措施经验证有效,故障问题得到彻底解决。
参考文献:
[1] 潘琢金.C8051F020/1/2/3混合信号ISP FLASH微控制器数据手册[Z].新华龙电子有限公司,2005年2月.
作者简介:
杨伦(1980-),男,湖北随州人,工程硕士,研究方向为测控系统与传感器。
猜你喜欢
科技与创新(2017年1期)2017-02-16
中国科技纵横(2016年20期)2016-12-28
商情(2016年42期)2016-12-23
航空兵器(2016年4期)2016-11-28
科技视界(2016年20期)2016-09-29
成才之路(2016年20期)2016-08-09
科技视界(2016年10期)2016-04-26
科技资讯(2015年19期)2015-10-09
科技资讯(2015年7期)2015-07-02
水运管理(2015年3期)2015-04-30
