
液压重载机械手的结构设计与分析
2020-08-11 08:51蔡建春张涛涛
装备维修技术 2020年32期
蔡建春 张涛涛
摘 要:随着现代工业经济的快速发展,重型装备越来越趋于大型化,大型设备的维护保养及辅助生产对工作环境、安全及效率提出了更高的要求。针对矿山领域的重载机器人,国内学者已经进行了多方面的技术研究。近年来,越来越多的企业更加关注磨机作业系统在全生产周期的综合效能。为解决作业效率、生产安全等问题,中信重工机械股份有限公司开发了一批磨机更换衬板机械手,工程应用需要其具有重载、高可靠性,因此,对机械手结构进行设计与优化研究显得十分必要。
关键词:液压重载;机械手;结构设计
引言
现代工业生产的自动化程度不断提高,逐步与智能化和计算机网络化管理相结合,机器人有2种,分别是工业机器人和特种机器人,它们在生产中起到的作用不一样。特种机器人不仅可以处理易燃易爆的物品,而且还可以充当很多军事侦察兵的角色,从而保护了人类,避免人类自身生命安全受到威胁。
1机械手分类
(1)电力传动机械手:电力传动机械手以电力作为使能源驱动。常常以电机(如直流电机、伺服电机等)作为驱动设备,此类机械手具有控制精度高、响应速度快、稳定性高等特点。
(2)液压传动机械手:液压传动机械手以使用压缩液体蓄能进行可控制的能量传递,由于液压装置机械手的强大力、可控性和速度,在工业生产的所有领域也是可控的。其缺点是对液体储能装置的密闭险要求极高,一旦发生工作液体泄漏,易造成误动作和污染事故。若采用液压油作为传动介质,由于其对温度比较敏感,所以需要增加冷却或加热装置,以保证液压油的工作温度。
(3)气压传动机械手:气压传动机械手是以压缩气体作为动力介质,凭借压缩气体所产生的压力进行能量传递和转换的技术。压缩气体通过管道和阀体为驱动系统提供使能,一般通过各种气动执行元件将压缩气体转换为动能。气动传动机械手的优点是成本低、结构简单、动作相应速度高;它的缺点是工作过程中力矩小、稳定性差,所以气动传动机械手目前只适用于轻工粗略控制的生产环境。
(4)机械传动机械手:机械传动机械手是以机械结构搭建平台,直接以机械能的形势进行控制的一种机械手。其中比较多见的结构有凸轮、齿轮、连杆、齿条和滑杆等,机械传动机械手的优点在于控制精度高、动作执行可靠。
2液压重载机械手结构设计
2.1机械手多体动力学分析
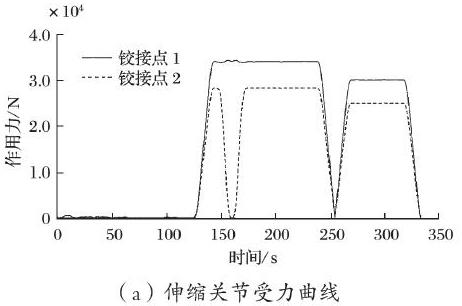
为了能够较为精确地获取伸缩臂与平摆动電动机连接法兰面的作用力及弯矩,需对机械手整机进行多体动力学分析。在机械手运行过程中,伸缩外臂的弹性位移对提取作用力、弯矩大小的影响未知,同时,伸缩外臂的弹性位移对关键位置液压缸铰接处作用力、电动机转矩大小的影响也未知,从而对设计液压缸和电动机的性能造成了偏差。因此,利用ADAMS软件,将机械手整机刚体和刚-柔耦合体分别进行了多体动力学分析。刚体条件下多体动力学分析曲线如图1所示。提取与伸缩内臂连接缸的铰接点1和连接小伸缩臂液压缸的铰接点2,其在连续运行过程中的受力曲线如图1(a)所示,铰接点1的最大作用力为34859N,铰接点2的最大作用力为27676N;俯仰摆动电动机1、滚摆动电动机2、平摆动电动机3在连续运行过程中的转矩曲线,电动机1的最大输出转矩为27638N·m,电动机2的最大输出转矩为28675N·m,电动机3的最大输出转矩为39527N·m;伸缩内臂端部竖直方向作用力曲线,此处的最大作用力为48912N;伸缩内臂端部弯矩曲线,最大弯矩为58176N·m。刚-柔耦合多体动力学求解过程示意。求解前,需在ADAMS中将伸缩外臂进行柔性化处理。此时,与伸缩内臂连接缸的铰接点1和连接小伸缩臂液压缸的铰接点2在连续运行过程中的受力曲线,铰接点1的最大作用力为48876N,绞接点2的最大作用力为30487N;俯仰摆动电动机1、滚摆动电动机2、平摆动电动机3在连续运行过程中的转矩曲线,电动机1的最大输出转矩为29645N·m,电动机2的最大输出转矩为28917N·m,电动机3的最大输出转矩为45287N·m;伸缩内臂端部竖直方向作用力曲线,此处的最大作用力为73189N;伸缩内臂端部弯矩曲线,最大弯矩为99319N·m。刚体模型与刚-柔耦合模型仿真计算过程中,铰接点力及各电动机转矩的变化趋势基本一致,但后者数值变化具有波动,更符合实际设备运行情况。刚-柔耦合模型均较刚性体模型的计算结果大,其中,只有滚摆动电动机2的转矩值较为接近。由此可以说明伸缩外臂的弹性变形对机械手各关键液压缸、电动机的受载影响不可忽视。
2.2伸缩内臂有限元分析
在支撑辊式和滑轨式2种伸缩内臂模型中,各部件的材料属性:弹性模量为210GPa,泊松比为0.3,屈服强度为690MPa。为了提高计算效率,忽略了由于伸缩内臂与伸缩外臂连接方式不同造成刚-柔耦合计算时作用力F和弯矩T的误差。支撑辊式伸缩内臂部件的网格均采用四面体单元划分。在伸缩内臂左侧端面上分别施加力F和弯矩T,根据多体动力学刚-柔耦合计算分析可得F=73189N,T=99319N·m。对支撑辊内圆施加固定约束,伸缩内臂右侧孔约束除孔轴旋转以外的自由度。支撑辊和臂之间设置接触关系,摩擦因数取0.15。伸缩内臂与支撑辊接触位置的应力为1200MPa,应力值远大于材料屈服强度690MPa。因此,该结构不能满足正常使用要求。在伸缩内臂左侧端面上分别施加力F和弯矩T,根据多体动力学刚-柔耦合计算F=73189N,T=99319N·m。将大臂与转台铰接的孔及大臂与俯仰直线缸铰接孔施加固定约束,伸缩内臂和滑块之间设置接触关系,摩擦因数取0.15。内臂支撑滑块处最大等效应力为410MPa,小于材料屈服强度690MPa;最小安全系数为1.68,大于设计最小安全系数标准值1.5,满足设计要求。通过对支撑辊式和滑轨式伸缩内臂进行有限元分析可知,滑轨式结构较支撑辊式能大幅降低集中应力值,是一种较为合理的设计方案。
结语
刚体模型与刚-柔耦合模型仿真计算过程中,铰接点力及各电动机转矩的变化趋势基本一致,但后者数值变化具有波动,更符合实际设备运行情况。刚-柔耦合模型均较刚性体模型的计算结果大,其中,只有滚摆动电动机2的转矩值较为接近。说明伸缩外臂的弹性位移对机械手各关键液压缸、电动机的受载影响不可忽视,刚-柔耦合模型仿真分析可为进一步设计液压缸、电动机提供参考。滑轨式结构较支撑辊式结构能大幅降低集中应力值,是一种较为合理的设计方案。
参考文献:
[1]闫杰,徐莉萍,孙富强,等.磨机换衬板机械臂静力学与模态分析[J].矿山机械,2021,49(3):39-42.
[2]汤鹏洲,夏仲雷,罗铭.液压碎石机械手的刚-柔耦合动力学仿真分析[J].矿山机械,2016,44(8):39-42.
猜你喜欢
南北桥(2022年4期)2022-06-25
交通科技与管理(2022年8期)2022-05-07
理科爱好者(教育教学版)(2022年2期)2022-05-05
机电工程技术(2021年3期)2021-09-10
科学与财富(2021年36期)2021-05-10
环球时报(2019-07-18)2019-07-18
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
现代职业教育·中职中专(2018年7期)2018-05-14
神州·上旬刊(2017年9期)2017-10-15
