
草鱼疫苗自动注射技术研究
2020-08-11 08:21张现广徐宏治邢精珠
渔业现代化 2020年4期
朱 烨,徐 皓,江 涛,洪 扬,张现广,徐宏治,邢精珠
(1 中国水产科学研究院渔业机械仪器研究所,上海 200092;2上海海洋大学工程学院,上海 201306)
草鱼(Ctenopharyngodonidellus)作为中国传统的四大淡水鱼之一,因其肉质鲜嫩,广受消费者喜爱,已成为淡水养殖的主导品种之一。但是草鱼抗病力低,病害问题一直存在,影响鱼上市的数量,造成鱼价格的波动,同时也影响到养殖户的利益。接种疫苗已成为必不可少的环节,也已成为现代国际水产养殖业的规范性生产标准要求[1-4]。接种疫苗可准确控制疫苗剂量,并且疫苗受环境的影响小,是鱼类免疫技术的理想方法[5-6]。目前,国内的鱼用疫苗注射大部分采用人工注射,其特点是劳动强度大、人工成本高。梁仍昊[7]对鱼苗自动注射机理与关键机构进行研究,实现草鱼鱼苗侧翻成功率为96.7%,完成疫苗自动注射系统的初步设计。李东东[8]利用机器视觉技术获取鱼苗形状参数,注射成功率为84.6%。朱烨等[9]将分形理论和BP算法相结合,为鱼类疫苗注射提供一个很好的识别方法。国外最早的疫苗注射装置由挪威研究开发并投入使用,随着后期不断的技术创新,以及机器视觉等技术的提升,鱼苗注射量可达每小时10 000~20 000条,注射效率不断提高[10-12]。但由于其注射装置机械结构繁多,成本较高,后期维护不便,故难以在国内推广使用。
本研究研发了一种草鱼鱼体识别及连续自动注射系统,该系统具有鱼体自动调头,鱼腹、鱼鳍准确判别,鱼苗精准拨动以及自动对准正确部位进行疫苗注射等功能。
1 系统组成
草鱼疫苗注射系统主要由鱼苗离散装置、鱼苗调头装置、识别装置、拨杆装置、注射滑台调节装置、自动注射装置、淋水装置等组成(图1)。
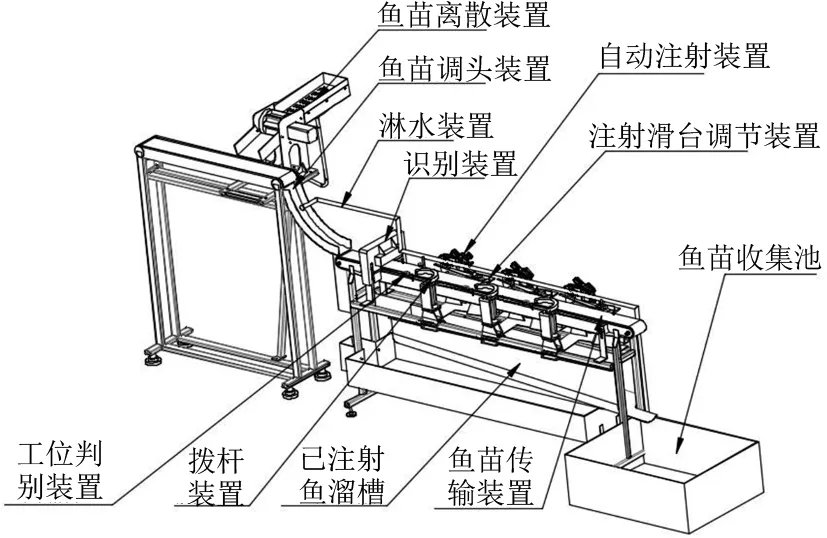
图1 草鱼疫苗注射系统结构图
1.1 离散装置
离散装置由集鱼斗、电机、离散轮、槽等部分组成,如图2所示。离散轮的圆周上等距分布7个槽。槽的容量设计为正好可以容纳一条长度为100~120 mm的草鱼苗,以防止2条及以上的鱼苗重叠进入离散传送带。集鱼斗与水平面之间存在约5°的夹角。电机带动离散轮转动,鱼苗在重力以及水流的作用下向离散轮靠拢。由于离散轮槽容积的限制,最终只有一只鱼苗进入离散轮槽。同时离散装置垂直于离散传送带,使得鱼苗落入离散传送带的姿态为平行于离散传送带行进的方向。
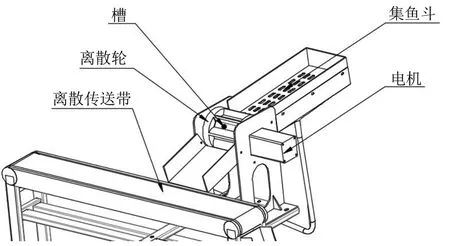
图2 鱼苗离散装置
1.2 鱼苗调头装置
鱼苗注射的部位选在鱼鳍部靠近鱼头的位置。为减少后续注射工序中注射工位的动作调整次数,在注射前需要将鱼的姿态统一调整为鱼头朝前。在运行过程中,鱼苗自离散传送带的末端跌入掉头过渡圆弧,与圆弧面接触之前在竖直方向上存在一个自由落体运动。由于鱼体的质量分布不均匀,根据鱼苗形态学分析,用悬挂法[13-14]测定鱼体的重心位置,多次测量可得在鱼体的长度和宽度方向上,其重心偏向于鱼腹。因此,在下落过程中鱼体发生偏转,最终使得重心一端靠下。
1.3 识别装置
1.3.1 测量光栅
通过一组测量光栅和一组色度识别传感器,获取草鱼在有序输送过程中的长度、色度信息。鱼苗体长100~120 mm,体厚10~15 mm,选用现有最小光点距2.5 mm、32个光点的测量光栅传感器。测量方法如图3所示,传输带以2 m/s的速度将鱼苗送入识别区,当鱼头碰到测量光栅[15-17]时开始计时,这时测量光栅一直处于接通状态,有电压值输出,直到测量光栅断开,输出电压为0 V,表示鱼苗离开识别区,得到鱼苗通过光栅的时间,进而计算出鱼苗的长度信息。遮挡光束的位置信号与模拟量输出电压的对应关系为:
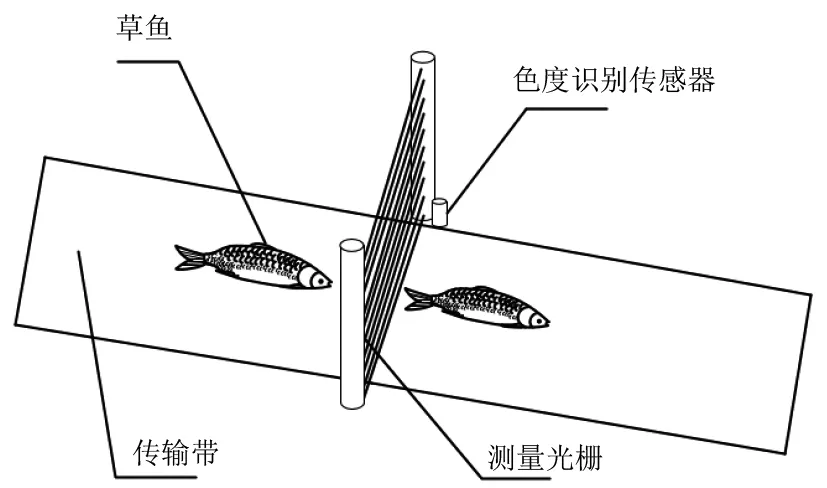
图3 测量光栅
(1)
式中:V1—遮挡光束位置对应的模拟量值,V;l—遮挡光束的个数;L—测量光栅光轴总数,共32个;V0—量程模拟量输出电压,10 V。
1.3.2 色度识别传感器
色度识别是指被识别物体的色度与设定的色度进行比较,当两个色度在一定的误差范围内相吻合时输出的检测结果[18-19]。识别过程中,由于草鱼鱼鳍部位和鱼腹部位的色度信息比较明显,可以用色度识别传感器来识别鱼腹和鱼鳍的状态信息。色度识别传感器接线图见图4。
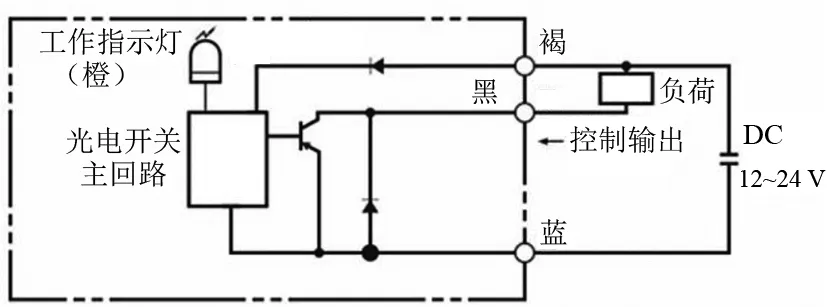
图4 色度识别传感器接线图
使用DC 12~24 V,NPN开关量输出,工作环境的白炽灯最大为20 000 Lx,日光最大为30 000 Lx。BS-501的检测准确度为千分之一,反应时间mark模式为50 μs。色度识别传感器安装在测量光栅边上(图3),当色度识别传感器扫描到鱼体时,将传感器内部设定的颜色参数与鱼体色度信息进行对比,如果参数相同则输出信号为1,相反则输出信号为0。然后将识别的信号传到工位判别系统,控制拨杆对鱼苗进行多工位协调注射。
色度识别率的计算公式:
(2)
式中:α—色度传感器识别鱼苗准确率;n—色度传感器判定正确鱼苗数,条;N—色度传感器扫描鱼苗数,条。
1.4 拨杆装置
拨杆装置主要是由半圆形旋转拨杆、步进电机、步进电机驱动器、步进电机控制器等组成(图5)。当鱼苗在传输过程中,工位判别传感器识别鱼苗信号,并将信号传给步进电机控制器,步进电机控制器发送脉冲和方向信号,驱动步进电机运行一圈,即半圆形的旋转拨杆摆动一圈,将鱼苗摆入注射区。传感器判别率计算公式为:

图5 拨杆装置
(3)
式中:β—工位判别传感器正确率;m—工位判别传感器判定正确鱼苗数,条;M—工位判别传感器扫描鱼苗数,条。
步进电机是一种将电脉冲转化为角位移的执行机构。当步进驱动器接收到一个脉冲信号时,步进电机则按设定的方向转动一个固定的角度(称为步距角),通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时也可以控制脉冲频率来控制电机转动的速度和加速度,从而达到调速和定位的目的[20]。
步进电机控制器选用YBD_MC01型控制器,该控制器有8种控制模式,根据拨杆系统控制要求,选择上电回零模式和定长模式。上电回零模式是指当控制器上电后,步进电机自动校准,运行至初始位置;定长模式是指当鱼苗通过工位判别传感器时,步进电机控制器发送脉冲和方向信号,驱动步进电机运行一圈(将鱼体摆入注射区)。步进电机控制器接线如图6所示。

图6 步进电机控制器接线图
1.5 注射位置调节装置
通过测量光栅可得到鱼体长度,通过控制注射滑台的移动长度及注射位置对鱼苗的相应位置进行注射。注射位置调节计算过程:传输带以一定速度v带动鱼苗向前移,从碰到测量光栅开始计时,到离开测量光栅停止计时,计时时间可通过中央处理器PLC编程得到为t,则鱼苗的长度(mm)为:s=v×t。由于注射鱼苗位置大小为100~120 mm,注射位置可调距离为0~10 mm,根据鱼苗注射位置和草鱼长度相关性较好,呈线性相关[8],建立线性模型:
(4)
式中:x—鱼苗注射位置,mm;s—鱼苗长度,mm。
1.6 注射装置
注射装置是将进入注射区的鱼苗按顺序进行疫苗注射的机构。采用气动注射的形式,按序完成压板下压、注射针头插入、注射活塞推动、注射针头回收、注射活塞回收、压板松开、滑台打开、滑台闭合的注射动作。注射准确率计算公式:
(5)
式中:δ—气动注射系统动作准确率;g—鱼苗准确注射数,条;G—进入注射区鱼苗总数,条。
2 控制系统
2.1 控制方案设计
首先对鱼体进行麻醉,再通过吸捕装置将鱼苗输送至离散装置进行鱼苗分离,然后根据鱼体重心不同自动调头翻身,运用一组测量光栅和一组色度传感器,获取鱼苗在有序输送过程中的鱼长、色度信息,中央处理单元根据获取的上述信息与预设值进行对比,判断鱼长、背鳍的位置是否符合要求。不符合要求的鱼苗沿输送装置返回鱼池,符合要求的通过拨杆装置从传输带上拨入打针通道进行有序注射,注射后的鱼苗释放至已注射鱼池中。系统方案流程见图7。
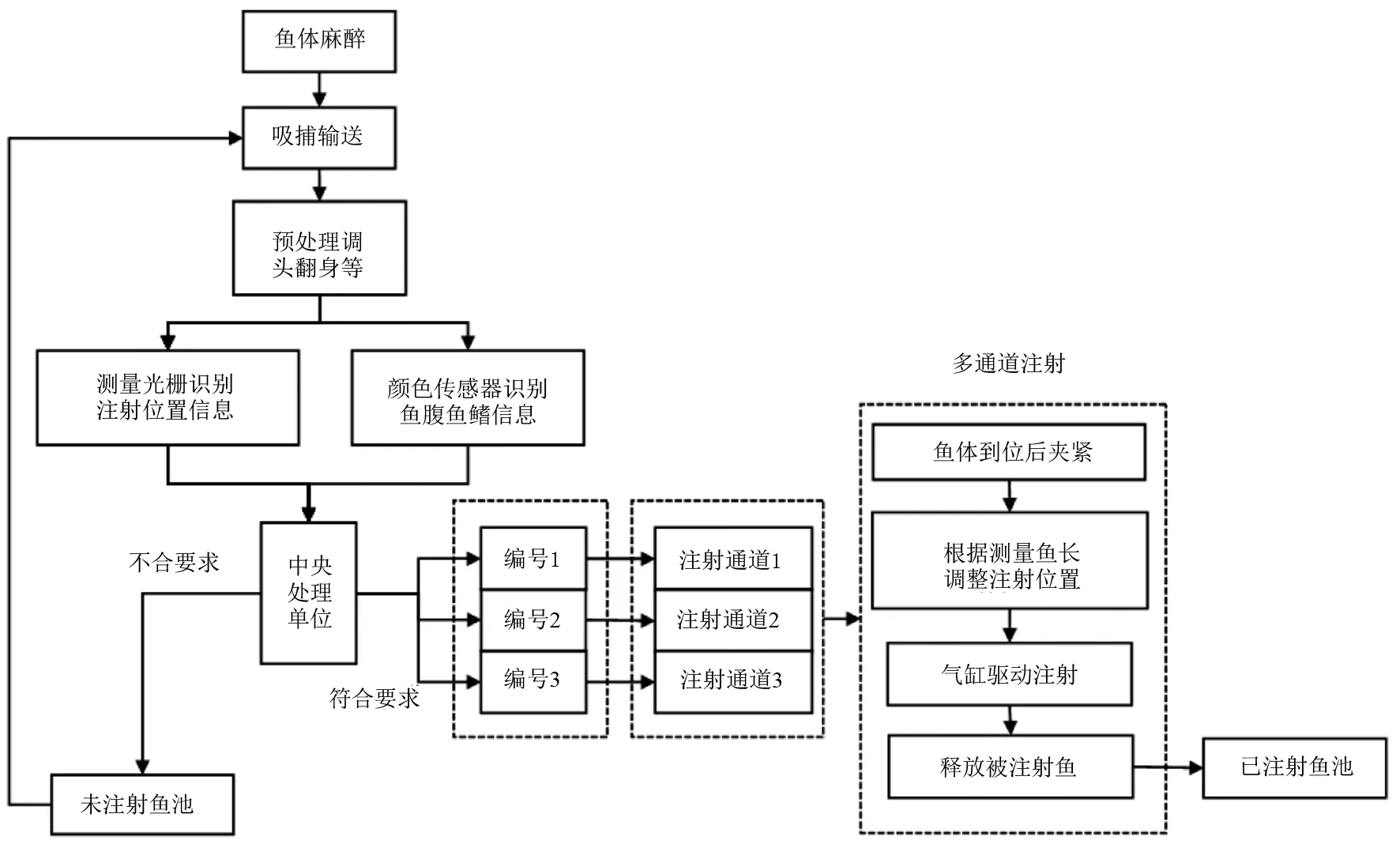
图7 系统方案流程图
2.2 硬件选型
系统PLC选用SIEMENS Smart200型[21-22],其中CPU为ST60型(36点输入,24点输出);开关电源输入24V DC;触摸屏选用SIEMENS Smart 1000IE v3;工位判别选用G12A-M1002/1型常开对射传感器,拨杆装置选用57BYGH1.8°步进电机,控制器型号为YBD_MC01,传输带电机型号为86BYGH260-4504A-ZK15。
2.3 软件设计
2.3.1 触摸屏界面
系统采用可控界面西门子触摸屏,触摸屏与PLC之间采用TCP/IP通讯协议,触摸屏界面软件采用Wincc Flexible Smart v3组态软件[23]编写,存放于触摸屏内存中,主要实现设备参数、运行动态参数等的输入、读取和显示。在疫苗注射界面中,数据信息可在控制面板中显示及相关操作。从上位机中输入数字信号,直接送入PLC的输入端,最后在上位机中显示信号值。由于控制系统采用虚拟的开关,减少了外部开关和中间继电器,操作方便。
2.3.2 系统软件
控制系统主要由PLC控制模块编程实现,通过记录各工位传感器的位置信号及拨杆的位置状态,自动控制气动元件的动作顺序,实现精准注射。其PLC的I/O口接线如图8所示。
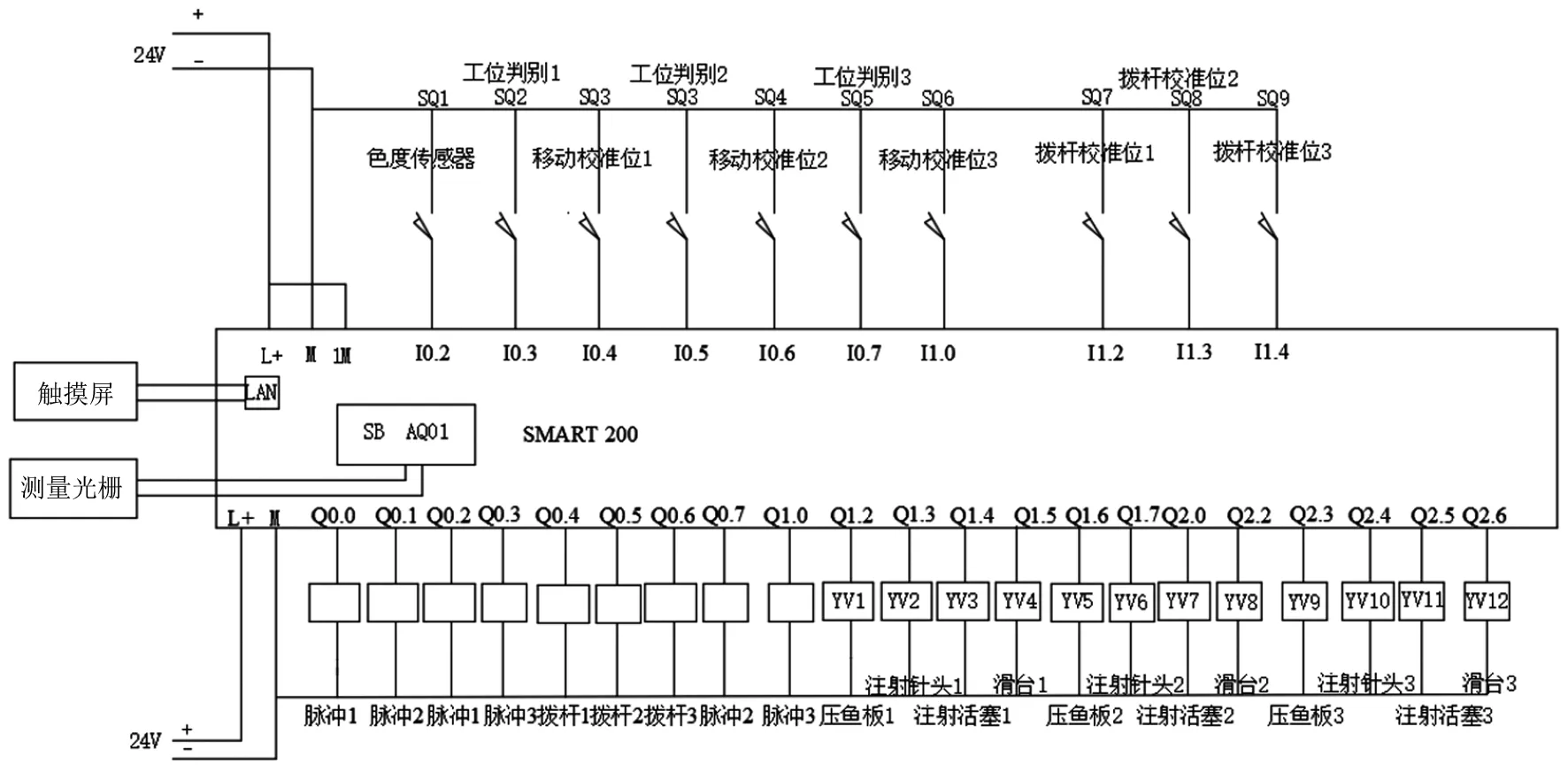
图8 PLC接线图
工位1动作流程,当鱼体通过工位判别1(I0.3)时,触发拨杆1(Q0.4)动作,此时拨杆1输出位(Q0.4),外接24 V小型继电器线圈,常开触点接步进电机控制器X1,拨杆可按设定的方向摆动一定距离;注射滑台调节系统,根据计算的鱼体长度信息,通过对应关系得到滑台移动距离,然后控制系统发送一定量的脉冲信号(Q0.0)和方向信号(Q0.2),注射滑台移动对应距离;鱼体摆进注射区后,控制系统控制对应电磁阀,顺序控制压鱼板1(Q1.2)下压,注射针头1(Q1.3)插入,注射活塞1(Q1.4)推动,注射针头1(Q1.3)收回,注射活塞1(Q1.4)回收,压鱼板1(Q1.2)松开,滑台1(Q1.5)打开,滑台1(Q1.5)闭合。工位2、工位3动作流程如工位1。
3 系统试验及数据分析
3.1 注射滑台试验
不同长度的鱼苗,因注射位置不同需要调节滑台位置,滑台可调距离为0~10 mm,鱼体长度为100~120 mm,随机选择1条鱼苗,测量并记录鱼体长度,通过鱼苗传输装置,经过测量光栅,记录计算的鱼体长度,同时测量并记录注射滑台的移动距离,随机试验8次。根据测量鱼体长度与计算鱼体长度,对滑台移动距离进行试验(表1)。
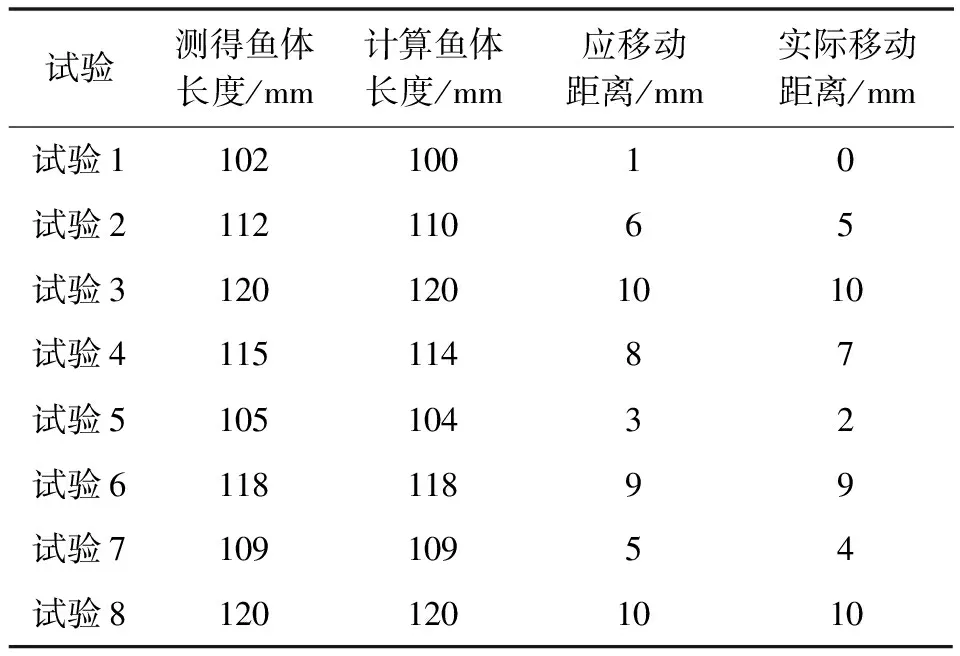
表1 移动距离
测量鱼体长度和计算鱼体长度有误差,这是由于鱼体尾部扁平,小于测量光栅的光间距2.5 mm,故在实际运行过程中滑台移动距离有可能会小于应移动距离。
3.2 注射试验
系统有3条通道,鱼体长度为100~120 mm,随机选择几十条鱼苗进行试验,试验6次,通过鱼苗传输装置,经过测量光栅,鱼体识别,再到连续鱼苗注射。对色度识别率、选别率、注射时间、注射准确率等参数进行分析(表2)。

表2 试验数据
表2可得,试验中色度识别率存在误差,平均色度识别率为98.3%,这是由于在识别过程中,个别鱼体颜色存在差异,导致在色度识别中存在一定的误差;同时在传输过程中,鱼苗的位置状态发生改变也会导致色度无法判别;选别率和色度识别率的影响因素相同,因为色度识别在鱼苗选别之前,所以当色度识别存在错误或者误识别时会对选别率有一定的影响;同时,试验中鱼苗间距离太小或鱼体首尾重叠也会导致选别错误,正常情况下鱼苗间距大于50 mm,选别正确率高;注射速率为0.250条/s,符合注射要求;试验中准确注射率达100%,证明鱼苗在注射通道内,气动注射动作准确。
3.3 暂养试验
通过试验对鱼苗的存活情况进行验证。试验分为4组,鱼苗体长100~120 mm。以丁香酚为主要成分的麻醉剂,用量为1.5 mL兑水20 L,即质量浓度约0.007 5%。鱼苗经麻醉1 h后注射0.9%的生理盐水,注射后放入30 L清水中进行苏醒,并暂养3周,观察其存活情况。由试验结果(表3)可知,注射深度2 mm可保证注射的药剂不发生溢出且对鱼苗的伤害较小。对注射疫苗的草鱼暂养观察一段时间,发现鱼苗存活率达98.8%,状态良好。
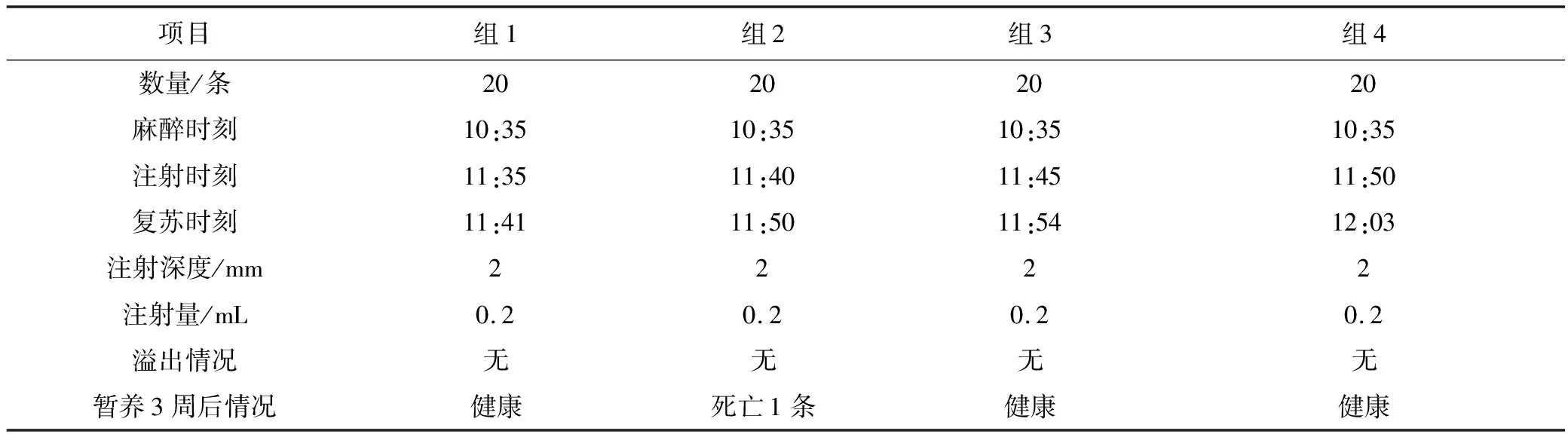
表3 注射草鱼苗暂养试验
4 结论
研制的鱼用疫苗自动注射装置,以100~120 mm长的草鱼苗为自动注射对象,开展活鱼注射试验,并将注射生理盐水的鱼苗暂养3周,发现存活率为98.8%。试验得,单边3工位注射产量为900尾/h。草鱼疫苗自动注射系统在试验中达到预期效果,初步掌握了鱼苗的高效连续注射技术。系统性能尚有进一步提高的必要,如在识别过程中可以加多组色度传感器,取平均信号,提高识别率;另外,可研发简易视觉系统进行鱼苗判别,进一步提高识别率,还可以增加双边多工位注射组,提高效率。
□
猜你喜欢
中国交通信息化(2022年5期)2022-07-23
中国中医药信息杂志(2022年3期)2022-03-16
浙江大学学报(理学版)(2022年1期)2022-02-21
保鲜与加工(2021年8期)2021-09-08
农业工程学报(2021年4期)2021-05-09
电子制作(2019年24期)2019-02-23
恋爱婚姻家庭·养生版(2018年11期)2018-11-26
艺术研究(2016年4期)2017-01-16
北方交通(2016年12期)2017-01-15
科技与创新(2016年14期)2016-07-23
