
仿人机器人关节驱动柔性特征自动检测系统
2020-08-03 07:58杨斌
现代电子技术 2020年8期
关键词:系统设计
杨斌
摘 要: 以快速检测大量仿人机器人关节驱动柔性特征为目标,设计仿人机器人关节驱动柔性特征自动检测系统。系统检测关节特征为关节扭矩,检测模块的轮辐式扭矩传感器与扭矩转速测量仪配合使用,测量关节扭矩大小。PLC控制器从步进电机与扭矩传感器中获取检测信息,向关节驱动器与控制器传输检测命令,实现关节扭矩自动检测。实时控制单元与非实时控制单元构成系统软件,二者以内存共享区域为中介分享检测数据,为检测模块提供软件支持。测试结果显示,系统检测仿人机器人关节扭矩误差低于0.2 N·m,符合仿人机器人关节特征检测标准。
关键词: 仿人机器人; 关节驱动; 系统设计; 关节特征监测; 关节扭矩; 系统测试
中图分类号: TN957.52+3?34; TP242 文献标识码: A 文章编号: 1004?373X(2020)08?0176?03
Automatic detection system for joint?driving flexible feature of humanoid robot
YANG Bin
(Department of Industrial Automation, Guang Dong Polytechnic College, Zhaoqing 526100, China)
Abstract: The automatic detection system for joint?driving flexible features of humanoid robot is designed with taken rapid detection of a large number of joint?driving flexible features of humanoid robot as target. The joint feature detected by the system is the joint torque, and the hub?and?spoke torque sensor of the system detection module is used together with the torque rotational speed measurer to measure the size of the joint torque. The PLC controller obtains detection information from stepping motor and torque sensor, and transmits detection command to joint driver and controller, so as to realize the automatic detection of joint torque. The real?time control unit and the non?real?time control unit constitute the system software, and both which share the detection data with the memory shared area as the intermediary to provide software support for the detection module. The testing results show that the torque error of humanoid robot′s joint detected by the system is less than 0.2 N·m, which conforms to the detection standard of joint feature of humanoid robot.
Keywords: humanoid robot; joint drive; system design; joint feature detection; joint torque; system test
0 引 言
機器人发展水平是国家科技发展的体现与象征,是智能化领域的延伸。仿人机器人集计算机技术、传感器技术、电子技术与控制技术于一身,兼具人类的四肢与头部,依照人类行为与形态设计行走姿态[1]。机器人关节驱动柔性是仿人设计的突出表现,其在电机驱动下可模仿人类扭转上下肢关节[2?3]。
仿人机器人关节驱动柔性特征较多,如扭矩特征、转角特征、振动特征等[4],这些特征均能体现机器人关节是否符合生产标准、能否在工作中正常运行[5]。为此,本文以提升仿人机器人关节柔性控制效果与性能为目标,设计自动检测系统检测仿人机器人关节扭矩特征,为保障机器人关节合格率、优化仿人机器人关节柔性提供参考依据。
1 设计与应用
1.1 硬件组成
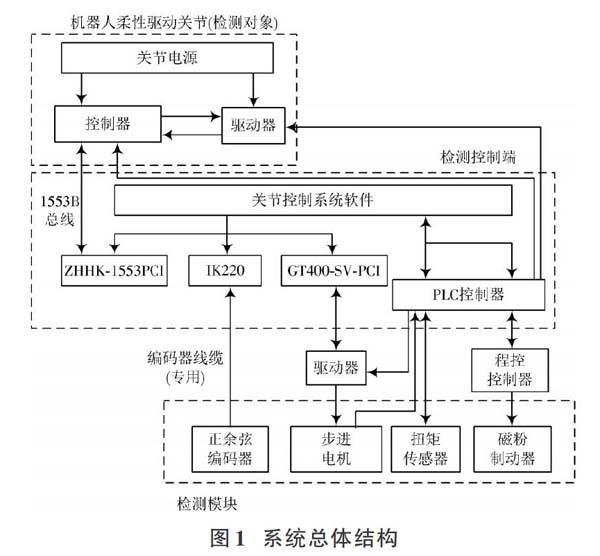
仿人机器人关节驱动柔性特征自动检测系统的硬件包括检测对象、检测控制端和检测模块三部分,如图1所示。
1) 检测对象为仿人机器人关节,通过关节驱动器、电源以及关节控制器展现关节驱动柔性特征。1553B总线是关节控制器与检测控制端的连接中介,总线协议接口芯片型号为J16580R,在RT 16位缓冲模式下运行良好[6]。
2) 检测控制端的PLC自动控制器与检测对象驱动器控制器连接,与检测模块的步进电机、驱动器等元件连接,通过这种连接关系自动传输控制信息,确保系统自动检测关节特征。PLC自动控制器采用带晶体管形式输出,该控制器的Q0.0,Q0.1,Q0.2端口可输出3个高速脉冲信号,脉冲频率[7]上限为100 kHz。
3) 扭矩传感器、步进电机、正余弦编码器以及磁粉制动器是检测模块的主要元件。其中只有编码器直接连接计算机板卡,另外元件不具备该功能,编码器结合IK220板卡采集检测数据并有效处理[8],扭矩传感器与磁粉制动器以RS 232串口完成数据通信。轮辐式扭矩传感器具有较强的抗干扰能力与灵敏度,组装简单[9],多个轮辐以对称的形式分布[10]。设置扭矩转速测量仪配合扭矩传感器使用,“置零”是扭矩转速测量仪的突出功能,可有效防止外界温湿度等因素对传感器测量产生干扰,降低传感器测量准确度[11]。传感器精度在仿人机器人关节设计指标精度以上,测量区间大于关节测量变化区间[12]。
1.2 软件组成
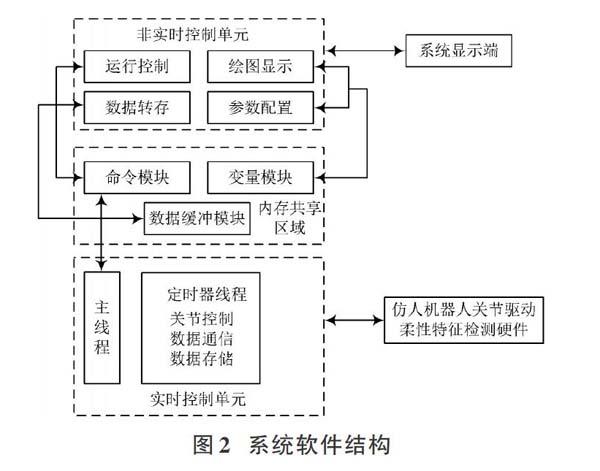
在Windows XP+RTX环境中开发设计仿人机器人关节驱动柔性特征自动检测系统,系统软件部分设计上位机软件实时掌握仿人机器人特征检测情况。图2为仿人机器人关节驱动柔性特征自动检测系统的软件结构。
系统软件设计分实时控制单元与非实时控制单元,两单元以内存共享区域为中介实现检测相关数据交互[13]。命令模块、变量模块以及数据缓冲模块是内容共享区域的主要构成,功能是将读取用户的开启主线程、调整关节控制模式等命令传递至实时单元[14]。变量模块具有两个主要功能:一是向非实时单元传递线程运行状态信息,如关节控制信息、线程自身状态信息等;二是向实时线程输出关节位置、关节目标电流等控制参数[15]。最后,仿人机器人关节驱动柔性特征自动检测系统运行过程中产生的全部过程数据、状态信息存储在数据缓冲区。
2 系统测试
选取某高校实验室作为实验场所,在Windows 7中运行系统软件,在Matlab平台中处理检测数据。实验硬件与软件环境搭建完毕,选取5种型号仿人机器人作为系统测试对象,不同型号仿人机器人外观差异较大。A,B,C,D,E为5种型号机器人编号,系统具体测试对象为机器人的上肢与下肢。同时设置仿人机器人关节扭矩特征检测误差在0~0.2 N·m之间为符合要求。
2.1 系统检测界面
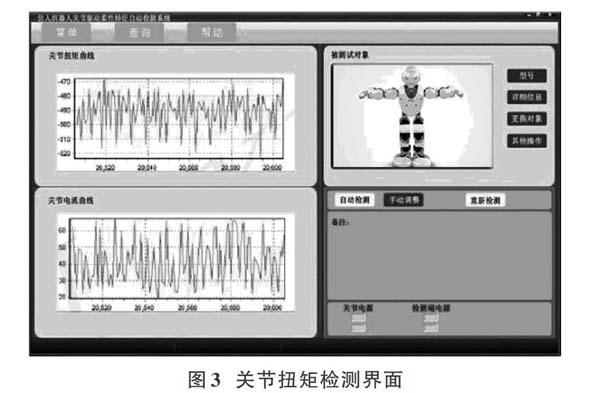
检测仿人机器人关节扭矩的界面如图3所示。
图中,关节扭矩检测界面左侧自动显示关节扭矩曲线与电流曲线,以供分析机器人关节柔性驱动特征是否符合标准;界面右上端展示被测量仿人机器人的整体形象,点击右侧选项可查看详细信息,根据需求更换检测对象;右下端具备自动检测、手动检测、重新检测功能,用户按需求选择检测类型;检测中出现意外情况或重要信息可在备注栏中记录。
2.2 检测结果分析
采用本文系统检测结果如表1所示。
对比本文系统检测结果与关节扭矩真实设定值,得到本文系统检测误差如表2所示。
表2显示本文系统检测机器人关节扭矩误差最大为0.15 N·m,低于0.2 N·m,符合机器人关节扭矩检测标准,因此本文系统检测结构可靠性较强,具有一定的实际应用价值。
2.3 系统性能分析
选取50个机器人左上肢肘关节作为测试对象,采用自适应关节检测系统、在线模糊调整关节检测系统作为对比,在相同实验环境下检测机器人关节的扭矩,记录检测过程中三种系统时间开销、灵敏度、扭矩检测误差三种性能指标,结果如表3所示。
表3数据显示,本文系统检测50个左上肢肘关节时间开销为25 min,相比自适应关节检测系统、在线模糊调整关节检测系统节约187 min,223 min。由于本文系统具备自动检测功能,形成自动检测流程,大量节省人工安装、拆卸关节等工作量,检测时间开销较小;相对而言,另外两种对比系统不具备自动检测功能,检测时间开销较大。本文系统检测关节扭矩的灵敏度高达152.3 mV·(N·m)?1,对关节扭矩的反应较快,识别能力强。扭矩检测误差结果显示,本文系统与在线模糊调整关节检测系统符合机器人关节扭矩检测标准,但自适应关节检测系统检测误差为0.32 N·m,誤差较大。综合对比可知,本文系统检测性能良好,优势突出。
3 结 论
仿人机器人关节驱动柔性特征较多,本文设计的仿人机器人关节驱动柔性特征自动检测系统主要检测关节的扭矩特征。配合使用轮辐式扭矩传感器与扭矩转速测量仪监测关节扭矩数据,采用PLC自动控制器实现关节自动检测。测试结果显示,本文系统智能化水平较高,检测时间耗费少,适合应用于大批量机器人关节扭矩检测中。
参考文献
[1] 杨亮,傅瑜,何怀文.基于腿部关节控制的仿人机器人偏摆力矩控制方法[J].控制与决策,2016,31(1):79?83.
[2] 史延雷,张明路,张小俊,等.一种旋转型机器人柔性关节设计与分析[J].中国机械工程,2016,27(18):2494?2500.
[3] 王旭辉,周岩.欠驱动柔性关节机器人的趋同控制策略[J].计算机工程与设计,2017,38(5):1366?1370.
[4] 韩亚丽,吴振宇,许有熊,等.基于多模式弹性驱动器的膝关节外骨骼机械腿[J].机器人,2017,39(4):498?504.
[5] 李泽国,李国栋.基于神经网络重力前馈补偿的柔性关节机器人分层控制[J].天津科技大学学报,2017,32(6):53?58.
[6] 李永,朱松青,高海涛,等.基于混合摩擦的柔性关节机器人跟踪控制研究[J].组合机床与自动化加工技术,2019 (1):113?116.
[7] 孟瑶,李晓娟,关永,等.机器人关节通信总线系统的建模与验证[J].软件学报,2018,29(6):189?205.
[8] 余永华,董俊威.逆磁致伸缩扭矩传感器特性分析[J].武汉理工大学学报,2017,39(1):68?72.
[9] 陈翔,黄龙,杨洋.基于计算力矩法的眼内手术机器人的重力补偿[J].北京航空航天大学学报,2017,43(6):1231?1238.
[10] 张燕君,张亦男,付兴虎,等.可调量程的轮辐式光纤光栅扭矩传感器[J].光电工程,2017,44(8):791?797.
[11] 王亚珍,汪安明,赵坤,等.基于薄壁圆环理论的机器人用柔性轴承变形特征快速求解[J].农业工程学报,2019,35(3):68?74.
[12] 吴洁琼,蔡启仲,潘绍明,等.基于ARM?FPGA的小型PLC逻辑运算控制器的设计[J].计算机工程与设计,2016,37(9):2394?2399.
(上接第178页)
[13] 赵云伟,耿德旭,刘晓敏,等.气动柔性关节仿生六足机器人步态规划与运动性能研究[J].农业机械学报,2018,49(2):385?394.
[14] 何洪军,刘福强,马传宝,等.基于仿人机器人伺服关节步态实验研究[J].微特电机,2016,44(12):40?43.
[15] 孙广开,曲道明,周正干.机器人辅助激光超声检测系统的设计与实现[J].压电与声光,2017,39(5):780?783.
猜你喜欢
电脑知识与技术(2016年26期)2016-11-25
电脑知识与技术(2016年26期)2016-11-24
中小企业管理与科技·上旬刊(2016年10期)2016-11-15
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年22期)2016-10-18
企业导报(2016年6期)2016-04-21
科技视界(2015年25期)2015-09-01
