
星载小型化激光通信终端技术研究现状及发展方向综述①
2020-08-03 08:54:28夏方园陈安和刘佳妮冯向兵郑少林刘宗伟
空间电子技术 2020年3期
夏方园,陈 祥,陈安和,刘佳妮,冯向兵,郑少林,刘宗伟
(中国空间技术研究院西安分院,西安 710000)
0 引言
星间数传的发展趋势是要实现更高码速率的传输,卫星通信载荷也需要适用于空间平台的轻小型化和低能耗的要求,自由空间激光通信是能够满足这些要求的最优通信手段之一[1]。自由空间光通信相对于微波通信具有明显的优点:带宽大、抗电磁干扰和抗截获[2,3]。随着卫星激光通信技术成熟度的提升,自由空间激光通信能够实现高达数百吉比特的传输速率,在同样的码速率条件下,激光通信终端还具有体积小、重量轻、功耗低的优势[4],因此激光通信链路成为星间主干链路乃至组成光通信网络是未来卫星通信发展的必然趋势。
微型卫星与传统的大型卫星相比,具有成本低、开发周期短以及灵活组网等优点,因此得到了世界各国的重视,使得卫星市场逐渐向小型化方向(微型卫星和纳米卫星)发展。微纳卫星使用微波链路进行通信时,其数据传输能力严重受限,而光通信由于具有大容量、高速率的特点,更加适用于微型卫星通信。在这种情况下,激光通信系统的小型化技术是必然趋势。文章叙述了近年来小型化激光通信终端技术发展及其应用前景。
1 激光通信系统
激光通信终端的基本组成如图1所示,主要由光学头部和电控处理机两部分组成,光学头部包括PAT(Pointing,Acquirement,Tracking)系统、光学收发通道和望远镜组成,电控处理机包括机构控制器、供电单元和通信收发机部分。其中PAT系统一般包括粗指向机构(Corse Pointing Assembly,CPA)和精指向机构(Fine Pointing Assembly,FPA),CPA主要功能是根据终端电控处理机给予的指令,完成卫星激光通信终端的初始指向和大范围锥角螺旋扫瞄的执行,与FPA构成粗精卸载捕跟控制环路,共同实现激光链路的建立和稳定保持。
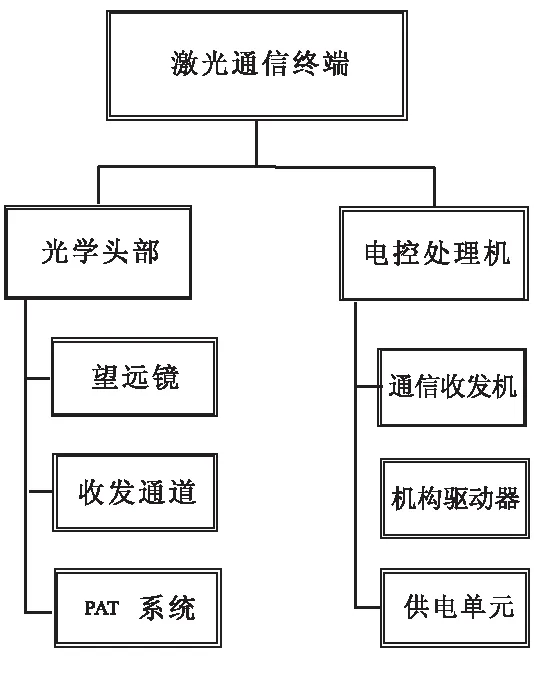
图1 激光通信终端组成框图Fig.1 Laser communication terminal composition
1.1 终端波长体制介绍
激光通信系统按照发射激光所选波长数量可分为单波长体制和多波长体制。相比于多波长体制,单波长体制的优点是便于组网,光学系统组成简单,有利于系统的轻小型化低功耗实现,缺点是系统为收发共用光路时,难以实现较高的收发隔离度。如图2所示为典型的单波长激光通信终端工作原理图。
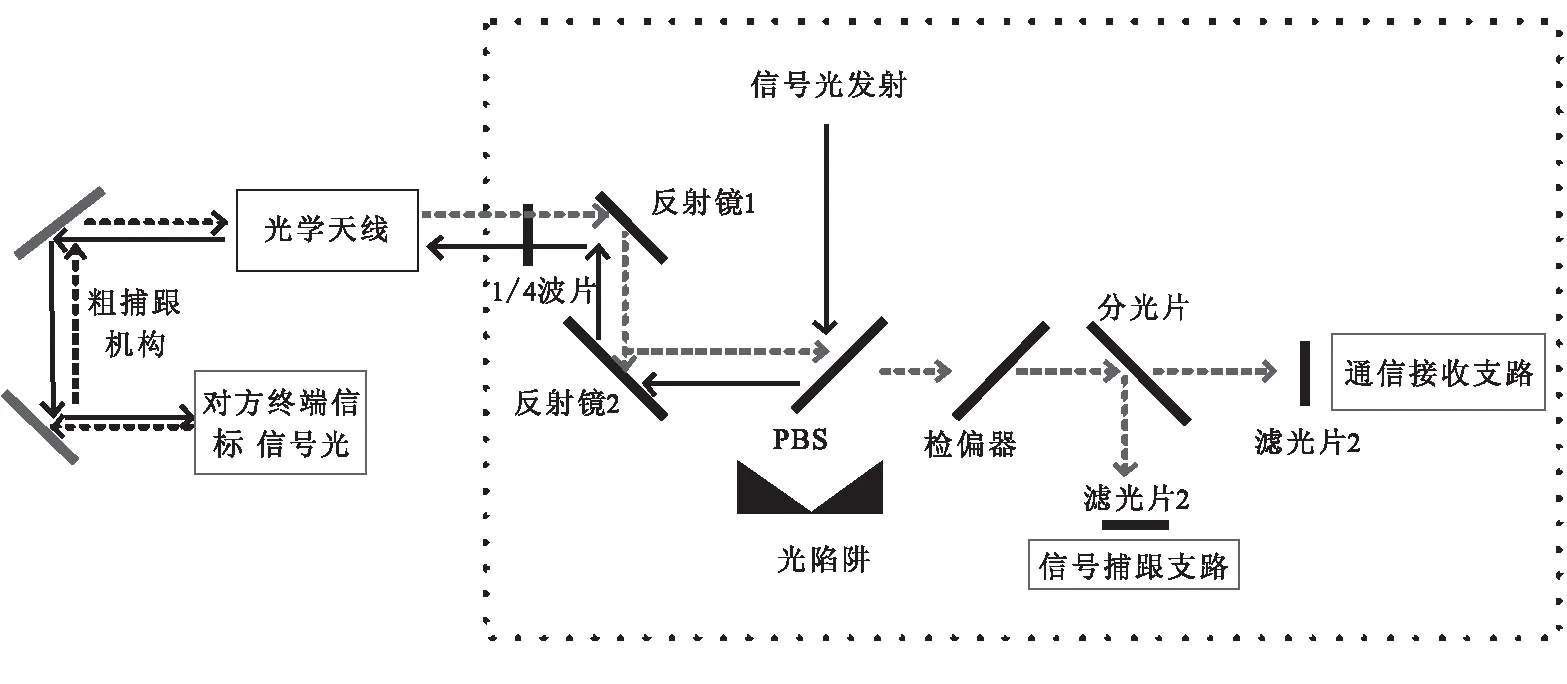
图2 典型单波长激光通信系统原理图Fig.2 Schematic diagram of a typical single-wavelength laser communication system
A终端发射经调制的线偏振激光,通过准直器、折轴反射镜、分光片到达望远镜,扩束后再经CPA发射至对方终端B;B终端接收到信号光,由PAT系统实现稳定跟踪建链,发射信标/信号光到达A终端,经望远镜缩束和收发通道到达捕跟和通信接收支路,最终到达通信探测器,接收机解调恢复基带信息实现星间数传。
1.2 终端构型介绍
按照CPA的结构形式,激光通信终端可大致分为潜望式、经纬仪式和摆镜式三种类型。摆镜式转动机构由于其较为紧凑的空间布局和较小的俯仰转动角,常应用于对跟瞄立体角要求较小的卫星轨道;经纬仪式的粗指向机构转动范围较大具有较大的指向立体角,且回转半径较小便于卫星平台安装;潜望式粗指向机构,具有较大的跟瞄立体角、便于锁紧停靠和热控的设计实施等优点。三种类型的CPA形态如图3所示。
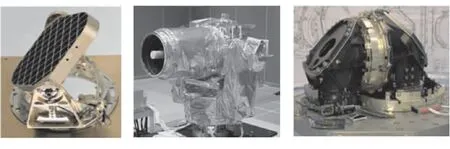
(a)摆镜式 (b)经纬仪式 (c)潜望式图3 三种类型的CPA结构形式Fig.3 Three types of CPA structure
在一些微纳立方星上,由于卫星平台的体积重量功耗限制,激光通信终端不使用CPA进行初始指向,而使用卫星平台调姿。使用该构型的终端,前提是激光通信终端是卫星主载荷,且仅能满足点对点通信,无法提供多建链节点的组网功能。
1.3 终端探测方式介绍
自由空间光通信系统中,接收机按照探测方式可分为直接探测和相干探测。直接探测是指利用光电探测器的直接光电转换功能就能实现信息的解调。相干探测相对于直接探测方式,需要多一个本振激光器与信号光经光混频器在探测器上相干涉,光电探测器响应两束光相干产生的差频分量输出一个中频光电流。直接探测方式最适宜于强光信号探测,提高探测器信噪比的方法是利用光谱滤波和空间滤波的方式,但是当通信距离较远接收到的信号光微弱,或者光通信系统对杂散光抑制能力要求较高时,光谱滤波仍无法实现卫星光通信系统的正常捕跟和通信,提高光电探测器信噪比需要使用相干探测的方式,抑制空间背景光和系统内部杂散光。在相干探测中,输出光电流携带的振幅、频率和位相的信息都可以探测出来,因此信号激光携带的振幅、频率和相位的调制信息都可以通过相干探测的方式实现解调,虽然直接探测只能解调振幅调制信息,但是工程上要实现相干探测,技术难度和复杂度比直接探测大的多。
2 国外小型化激光通信终端技术现状
2.1 美国星载小型化激光通信终端技术现状[5-7]
美国于2012年10月启动了光通信和探测器演示验证项目(Optical Communications and Sensor Demonstration,OCSD)。旨在验证未来小型航天器的两个主要功能:数据的高速光传输和小型航天器近旁操作。OCSD项目示意图见图3。OCSD项目生产三个1.5U立方体微型卫星,在两次独立的任务中作为次要有效载荷发射。2015年10月8日,OCSD第一次发射任务(OCSD-A)成功,主要用于对星际跟踪器和重要的子系统进行一些检查,包括电源,摄像头,GPS,无线电和部署机制,以支持OCSD的运行第二次飞行任务。OCSD第二次任务于2017年底发射。对于第二次任务,除了近旁操作演示之外,还展示了激光通信系统,涉及使用摄像机,信标,激光测距仪和使用可变阻力和推进实现相对位置测量。2019年4月10日,NASA成功进行了两颗立方星之间的激光通信实验,两星相距2414km,轨道高度451km。
OCSD-A搭载的激光通信终端,没有扫描跟踪系统,仅依靠卫星实现卫星对地的激光通信,光通信参数见表1,尺寸为10cm×10cm×10cm,总重量3kg,下行链路采用波长1064nm,通信速率计划达5Mbps,波束宽度0.15deg。

表1 OCSD-A光通信终端参数Tab.1 OCSD-A Optical Communication Terminal Parameters
OCSD项目完成首次立方星星地激光通信技术验证,同时验证了小卫星交会和逼近技术,成功进行了1.5U立方星对地100Mbps激光通信实验。这是世界上首次立方星对地激光通信实验。OCSD项目的主要目的是基于逼近传感器、低功耗激光通信系统和水工质推进系统演示高速数据传输以及小飞行器交会逼近操作。目前,NASA科学家已成功演示了OCSD卫星与光学地面站200Mbps激光通信。
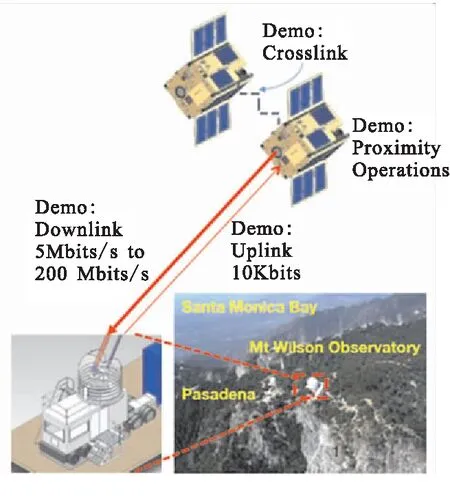
图4 OCSD项目计划Fig.4 OCSD project plan
2.2 欧洲星载小型化激光通信终端技术现状
2016年6月22日[8],DLR成功发射了微型卫星BIROS(Bi-spectral InfraRed Optical System),BIROS搭载由DLR开发的新型光通信终端OSIRISv2(Optical Space Infrared Downlink System),目标是实现针对小型卫星的光通信技术优化。OSIRISv2由三个主要部分组成,跟踪传感器及其电子设备,用于接收和处理来自地面站的信标信号,并为卫星有效载荷计算机提供跟踪信号和姿态控制。OSIRIS激光终端的跟踪传感器与发射器准直器安装在同一个光学台上,准直器与激光源连接,提供两种不同的激光信号,OSIRIS激光终端实物见图5。
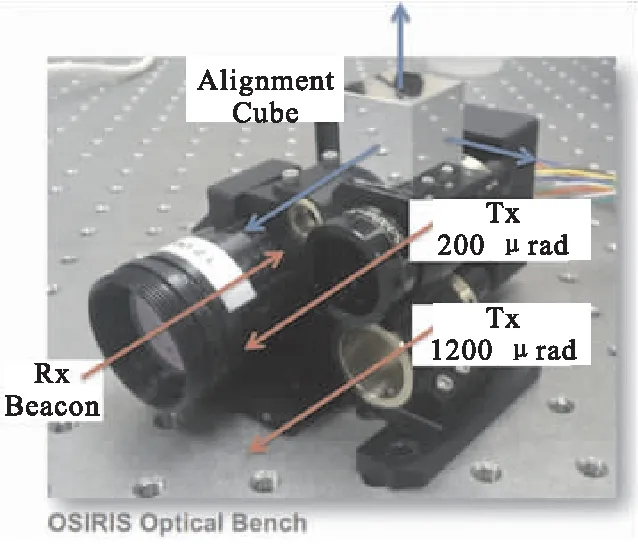
图5 OSIRISv2激光终端实物图Fig.5 Entity of OSIRISv2 laser terminal
OSIRISv2终端总重量为1.65kg,功耗37w,在1550nm波段处携带两个具有IM / DD调制的分离的激光源(冗余系统),详细参数见表2。OSIRISv2载荷集成过程见图6。
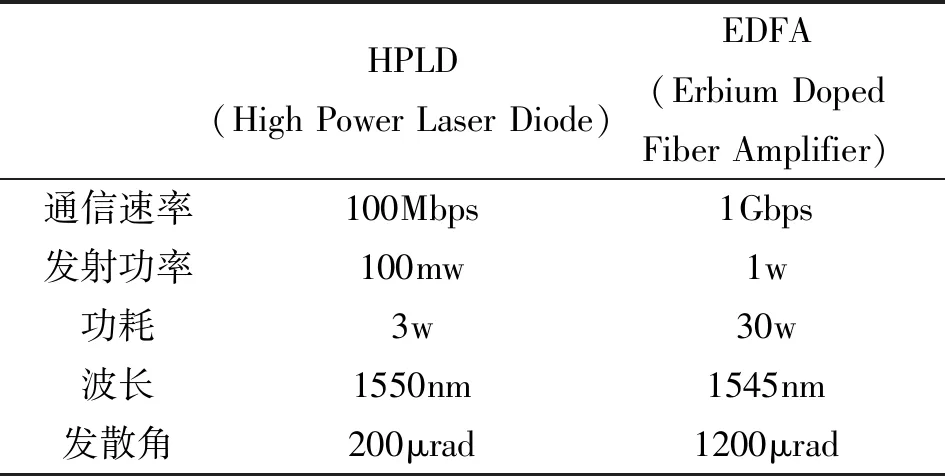
表2 两种激光源详细参数Tab.2 Detailed parameters of two laser sources
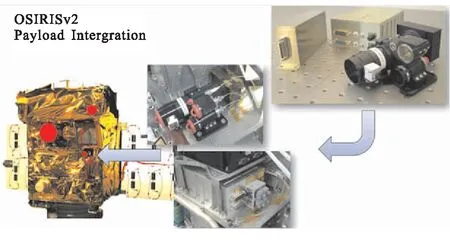
图6 OSIRISv2载荷集成过程Fig.6 Load integration process for OSIRISv2
为了减轻终端重量,光学平台采用铝合金和碳纤维材料制成。跟踪单元基于四象限光探测器,指向精度高,并依靠卫星姿态实现闭环指向。
2016年6月22日BIROS成功发射,但后续无有关OSIRISv2终端的实验新闻报道。DLR在OSIRISv2的基础上,计划研发OSIRISv3,OSIRISv3终端设计参考CCSDS(空间数据系统咨询委员会)标准:
(1)单波长体制
(2)下行链路通信速率:10Gbps
(3)包含上行光链路
(4)信标波长:1590nm
(5)信标光调制
(6)下行链路通信波长:1550nm
(7)使用相应的调制/数据方式
OSIRISv3终端研发目标:
(1)应用于小型LEO卫星(100kg级)
(2)5年使用寿命
(3)基于合格的COTS组件
(4)紧凑型终端:2kg,50w
(5)配备CPA
(6)终端具有数据处理功能
OPTEL-μ终端的目标是建立一个稳定的直接探测激光通信系统[9],用于以1.25Gbps的速率实现LEO卫星(400km~900km)的对地通信。OPTEL-μ终端的电性件开发由ESA通过TESLA-C项目实现。OPTEL-μ终端由三部分组成:光学头部安装在航天器外部,实现光束转向、采集和跟踪;电子单元,包括功率调节单元、终端处理器电子设备和数据存储器;激光单元,其将LEO有效在和数据调制到光载波上(在脉冲激光发射机中实现),并通过光放大器将调制载波功率提升到满足链路预算的水平。
OPTEL-μ相关参数见表3。终端总质量8kg,体积8L,功耗43W,下行链路使用波长1550nm波段,通信速率1.25Gbps,采取PPM/OOK调制方式,FEC信道编码及自动重传请求(ARQ)协议。电性件实物如图7所示。
(1)2016年10月:OPTEL-μ激光通信终端机械模型测试已完成;
(2)2017年2-4月:完成电性件环境试验;
(3)2017年5月:完成系统测试;
(4)2018年完成在轨试验。
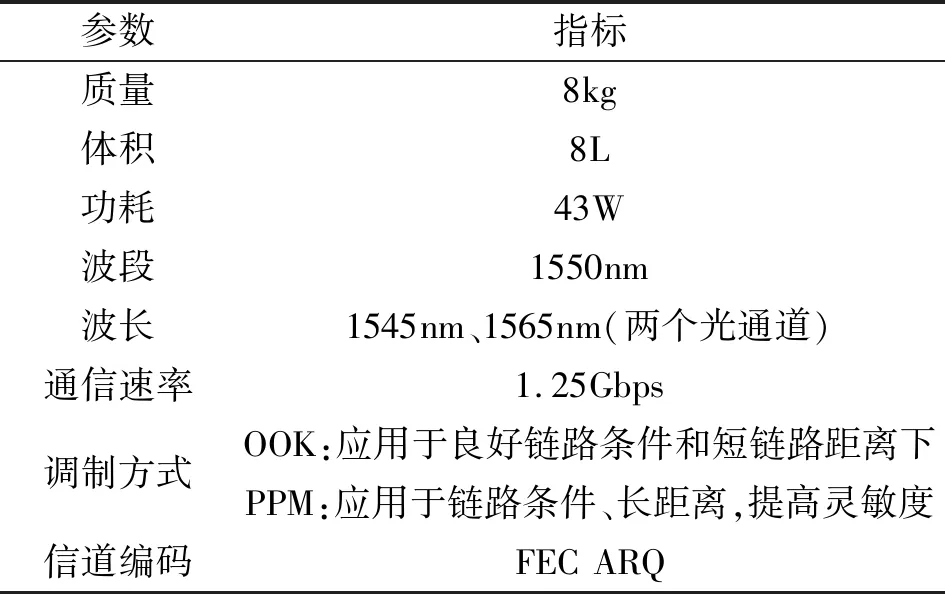
表3 OPTEL-μ激光终端相关参数Tab.3 OPTEL-u Laser Terminal Parameters

图7 OPTEL-μ激光终端实物(从左到右:光学头部,激光单元,电子单元)Fig.7 OPTEL-μ Laser Terminal(from left to right:optical head,laser unit,electronic unit)
2.3 日本星载小型化激光通信终端研发现状[10-12]
2014年5月24日,日本成功发射了SOCRATES小卫星,该任务的主要目标包含:(1)验证小型光端机SOTA的捕获、跟踪和通信性能;(2)使用不同波长实现数据在大气中的传播;(3)通信质量测试;(4)测试编码通信质量的影响;(5)基本量子密钥分配试验。最终促进自由光通信在小卫星和纳米卫星中的应用。
SOTA终端由SOTA-OPT(光学部件)和SOTA-CONT(控制单元)两部分组成。终端总重量约5.7kg,SOTA-OPT尺寸为177.5W×130D×264H (mm),SOTA-CONT尺寸为146W×140D×110.5H (mm)。
SOTA-OPT包含4个发射器(TX1~TX4),分别工作在976nm(TX1)、800nm(Tx2&3)和1550nm(TX4),其中TX1、TX4用于发射SOTA的PN数据、图像数据以及遥测数据,传输速率为10Mbps或1Mbps,TX2、TX3用于卫星量子密钥分配的基本量子测量。上行链路采取异步NRZ,载波频率40KHz,信号带宽1KHz,波长1064nm,接收口径50mm。下行链路采取NRZ-OOK调制,波长1549nm,通信距离600~1000km,地面接收采取IM/DD检测,接收口径1m。SOTA的APT功能由2轴万向节、FPM(Fine Pointing Mechanism)和相关传感器实现。AZ轴、EI轴角度范围均为±50deg。使用微步电机驱动2轴万向节,最小角分辨率为0.001125deg/pulse。SOTA的功耗取决于运行模式,预期最低功耗为28.1W,此时仅TX1实现信号传输。SOTA-OPT 原理样机、SOTA-CONT原理样机如图8所示。
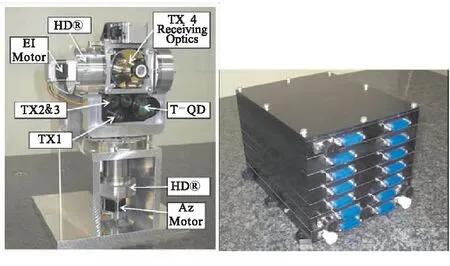
(a)SOTA-OPT (b)SOTA-CONT图8 SOTA激光终端组成实物图Fig.8 Composition of SOTA laser terminal
2017年7月,SOTA终端正常工作超过3年,已完成所有任务目标,包括:
(1)实现不同波长的LEO-OGS下行通信,速率可达10Mbps;(2)验证了SOTA对OGS信标光的粗跟踪和精跟踪;(3)验证了不同编码下通信性能;(4)完成基本量子密钥分配试验。
RISESat卫星是日本Tohoku大学研制微型卫星,计划2018年发射。由于质量限制,SOTA不能搭载于RISESat卫星运行,因此NICT开发研制了一款适用于RISESat卫星的新型、轻便、简单的激光终端VSOTA。VSOTA是一个仅传输系统,其激光校准器和LD驱动器的基本结构与SOTA相同。VSOTA-E为LD驱动电路,可发射激光波长980nm和1540nm,VSOTA-COL是两个激光准直器的集成,VSOTA-CNT是控制单元。VSOTA是一个仅传输系统,无接收光信号功能,该终端没有万向节设备(无CPA、FPA),与卫星主体刚性连接,通过精确控制卫星姿态实现与地面站对准。姿态对准精度要求:980nm通道0.1°(3σ),1540nm通道0.04°(3σ)。受限于对准精度、输出功率和地面设备的限制,预计下行链路最大通信速率为100Kbps,技术指标如表4所示。
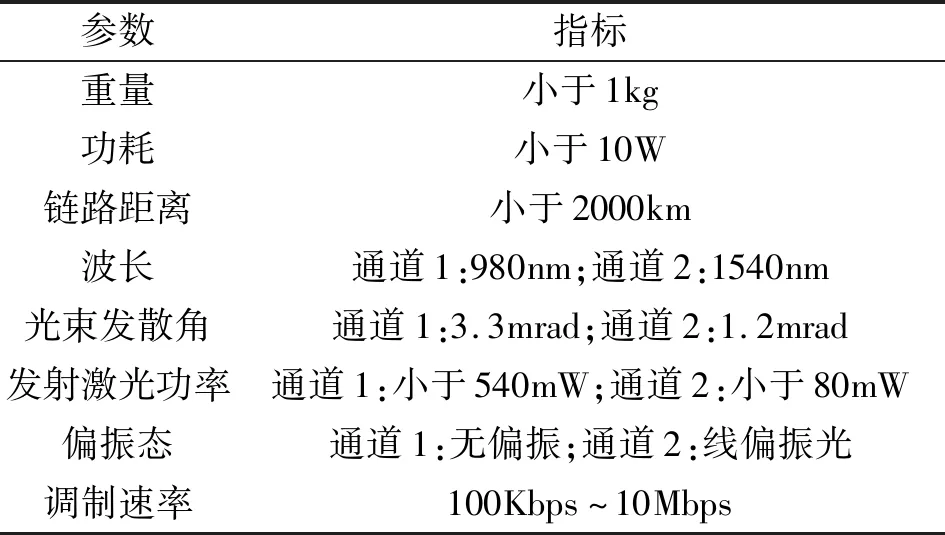
表4 VSOTA激光终端技术指标Tab.4 Technical Indicators of VSOTA Laser Terminals
3 国内激光通信终端发展现状
2011年底[13]哈工大研制的激光通信终端搭载了海洋二号卫星发射,并且验证星地激光通信技术,通信最高速率504Mbps,采用IM/DD通信体制,链路距离约1600km。2013年[14],哈尔滨工业大学在SJ-13搭载星地链路激光通信试验载荷,采用IM/DD通信体制,通信码速率为2.4Gbps/4.8Gbps,链路距离约36000km,SJ-13试验卫星已于2017年4月发射,并开展了星地激光链路捕跟、通信性能试验验证。2016年8月16日[15],全球首颗量子科学试验卫星“墨子”号成功发射,并实现了国内首个低轨卫星对地相干激光通信链路验证,星上终端采用BPSK/DPSK调制方式,链路距离约1000km,传输速率5Gbps。参加试验的地面站由中科院光电所等单位研制,实现了星地链路高精度激光通信的捕获跟踪,建立了星地激光链路。
4 星载小型化激光通信终端应用前景
星载小型化激光通信终端在卫星组网与互联技术领域有广阔的应用前景,包括对地观测领域、空间通信领域、科学技术试验领域、空间监视与攻防领域都有应用需求。微小卫星组网与互联领域的代表性事件与系统有:
(1)2015年1月,马斯克宣布了SpaceX的卫星互联网服务的计划。SpaceX计划将约1.2万颗微纳卫星发射到轨道,并从2020年开始工作。这一项目被命名为“星链”(Starlink)。星链计划分三步走,完成后将在近地轨道组成了两层庞大的卫星星座,内层340公里轨道高度的7518颗卫星与外层的1000多公里轨道高度的4425颗卫星组成的11943颗卫星星座。其中星间数传组网拟采用激光链路。
(2)OneWeb公司[16]的计划准备发射648颗卫星(后来更新为720颗),在距地球约1200公里的轨道形成一个卫星网络,向全球提供互联网宽带信号。从而提供与光纤类似的上网速度。OneWeb的卫星相对较小,重约285磅(约合130千克)。如果利用激光通信测距一体化的小型化激光载荷,卫星位置测量精度可以达到厘米级。OneWeb计划在2018年开始发射卫星,2019年末前完成星座的基本部署。
(3)加拿大的Telesat公司计划在11个轨道面部署117颗低轨卫星组建互联网星座,计划2021年发射,2022年提供卫星互联网服务,星间数传采用激光链路。
5 结论
综上所述,未来星载小型化激光通信终端技术的研究发展主要集中在两个方面:
(1)星载激光通信终端的轻小型化。受限于微小卫星平台对重量、体积、功耗的约束越来越低高,在满足项目任务指标要求的前提下, “三化”设计原则是未来设计趋势,即小型化、一体化、模块化。小型化:在确保激光通信终端功能和指标的前提下,载荷口径尽量小,采用新型电机技术、材料和集成电路,以实现终端小型化、轻量化和低功耗;一体化:通信测距一体化、捕获跟踪一体化,同时激光通信终端的粗指向机构、望远镜、收发通道、电控处理机与支撑结构一体化安装,使得激光载荷轻量化,便于星上安装操作,便于系统测试,简化与卫星的接口;模块化:激光调制发射机模块化、终端驱动控制模块化、通信测距功能模块化、捕获跟踪功能模块化设计,便于安装更换。
(2)星载激光通信终端初始指向方式。在中、短程激光通信距离中PAT技术中的初始指向主要实现途径有两种,一种依靠计算相对太阳、地球、恒星等的相对角位置以及GPS信息,精确定为卫星位置,调整卫星自身调姿对准通信目标,进入精跟视场,闭环控制实现激光通信;另外一种则是通过光学扫描的方法实现对通信目标的跟踪捕获,进一步引导进入跟踪视场,闭环控制实现激光通信。除此以外,当前世界各课题组中正在开展光学相控阵技术,采用非机械偏摆的方式实现激光通信终端初始指向,但是该技术在高速光束扫描和大范围指向以及控制精度等方面,短期内还无法应用于空间激光通信载荷。
随着星载激光通信终端技术逐渐成熟,我国星载中继激光骨干链路建设逐渐完善,急需发展网络拓扑简单可靠,业务类型多样,传输手段灵活的激光集成通信网络,实现重量功耗更低,抗电磁干扰更好,多频段多体制兼容,并具备组件可集成、功能可重构的星载激光通信终端技术。
猜你喜欢
纺织科学研究(2023年9期)2023-10-23 11:18:10
移动通信(2021年5期)2021-10-25 11:41:48
池州学院学报(2017年3期)2017-10-16 01:38:52
现代传输(2016年3期)2017-01-15 14:22:59
电信科学(2016年11期)2016-11-23 05:07:56
发明与创新(2015年33期)2015-02-27 10:40:00
中国卫生(2014年7期)2014-11-10 02:33:02
中国交通信息化(2014年3期)2014-06-05 03:07:09
自动化与仪表(2014年10期)2014-02-26 08:21:17
汽车与新动力(2012年5期)2012-03-25 10:09:40
