
基于主动学习的油气管道沿线地物变化检测
2020-08-03 05:01:12马剑林郑宇恒李双琴
科学技术与工程 2020年20期
马剑林, 郑宇恒, 李双琴, 孙 啸, 张 涛, 沈 忱, 邹 妍
(中国石油天然气股份有限公司西南管道分公司, 成都 610037)
近年来,随着经济的发展,油气管道外界环境越来越复杂,由于外界环境变化引起的油气管道泄漏事故频发。油气管道在储运过程中,沿线地物环境变化,如房屋的建设、沟壑的挖掘、滑坡等易造成管道的外漏、挤压等事故,因此对油气管道沿线地物变化情况进行及时、准确地监测十分重要[1]。传统的油气管道安全巡检通常采用人工巡检的方式,但是随着中国油气管道分布范围越来越广,沿线区域地物越来越复杂,传统的人工巡检方式不能有效识别油气管道沿线地物变化情况;而卫星遥感具有大范围、长时间和周期性监测的能力[2],因此利用卫星遥感影像对油气管道沿线地物变化情况进行检测具有可行性[3]。
变化检测是指通过对覆盖同一地区不同时相遥感影像的研究,定量分析和确定地表覆盖变化的特征与过程[4]。按照算法的自动化程度,变化检测可分为非监督和监督变化检测算法。
非监督变化检测算法一般是根据阈值分割直接将两时相影像生成的差值影像分为变化和非变化类别[5-6]。主要包括有影像差值法、变化向量分析法(change vector analysis, CVA)法[7]、马尔科夫随机场(Markov random filed, MRF)[8]等,非监督变化检测算法可以确定地物是否发生变化,但是无法判断变化类型,并且该类型变化检测技术的精度可能会受到不同时相影像的光照变化、大气条件和传感器校准差等外部因素的影响,一般检测精度相对较低[9]。
监督变化检测算法是在有先验知识的前提下,通过机器学习挖掘并提取遥感影像的变化信息,可以有效减少不同时相影像间的大气、光照条件等对检测结果的影响,一般检测精度较高[10]。但是在监督变化检测中,通常需要通过目视解译手动选择有标签的训练样本,可能会导致所选类别不全,并且费时费力,特别是针对数据量较大并且结构较为复杂的高分辨率遥感影像来说训练样本标记成本增加。半监督方法能够在少量标记样本的情况下利用一定的策略增选一些未标记的样本用于分类器的训练,在一定程度上减少了获取训练样本的代价并且解决了训练样本不足的现象。因此大量学者研究了半监督变化检测算法。赵敏[11]提出了基于支持向量机(support vector machine, SVM)的半监督变化检测算法并应用于矿区监测,与传统的变化检测算法相比,精度得到较大提高。但是该算法只是利用单一的分类器,并且在样本增选过程中未考虑噪声对训练样本的影响以及冗余信息。多分类器集成结构可以综合利用多个分类器的优势互补性能,主动学习可以通过一定的算法选择置信度高的未标记样本作为训练模型的增选样本来提高模型的精确度[12]。在分析了机器学习和半监督变化检测以及主动学习的基础上,构建了基于主动学习的半监督变化检测算法。
针对高分辨率遥感影像地物结构信息丰富等特点,当前研究热点主要围绕面向对象变化检测[13]和多特征空间融合[14]两个方面。如何有效挖掘并利用丰富的纹理特征、形态特征等空间信息来弥补光谱信息的不足,对于高分辨率遥感影像变化检测精度的提高具有重要的作用[15]。Peng等[16]以对象为分类基元,利用证据理论融合算法对多特征融合影像进行变化检测,与像素级变化检测结果相比,精度得到有效提高。由于不同地物具有不同的尺度特征,面向对象变化检测算法以影像对象为基元进行检测,因此可能会忽略尺度较小的地物变化。Tan等[17]通过提取纹理、Gabor滤波、形态特征与光谱特征一起构建多源特征进行变化检测,取得了较好的变化检测结果。
虽然已经有大量学者和专家针对高分辨率遥感影像变化检测做了改进,但是现存的方法中仍旧存在以下难点:受“同物异谱”和“同谱异物”影响,传统的基于光谱特征的面向像元的变化检测结果中存在伪变化以及“椒盐噪声”现象;遥感影像不同地物具有多尺度特征,单纯的面向对象的变化检测算法存在“分割失真”现象以及“均值问题”;基于机器学习的监督变化检测算法虽然有效提高了变化检测的精度,但是单分类器挖掘能力有限,并且训练样本获取困难。
针对以上高分辨率遥感影像的特点以及难点,在前人研究的基础上提出了基于多源特征融合和主动学习的遥感影像变化检测算法对油气管道沿线地物变化情况进行检测。首先通过特征提取构建最优多源特征矢量,然后利用自适应阈值算法选择初始训练样本,最后利用梯度提升树[18]、k近邻[19]和极限随机树[17]构成的集成结构在分割对象的基础上进行未标记样本的类别判定以及变化检测结果的提取,在利用多分类器集成进行未标记样本类别判定过程中,采用边缘采样的主动学习算法进行未标注样本增选。在样本增选过程中通过两方面对增选样本进行优化,首先通过分割对象约束分类器集成变化检测结果,减少“椒盐噪声”的影响,提高增选样本的准确性,然后利用边缘采样方法选择信息量较大的未标记样本进行标注。
1 基于多源特征融合的主动学习变化检测
1.1 多源特征的融合与差值影像的获取
1.1.1 多源特征提取
随着高分辨率遥感影像空间分辨率的提高,光谱波段信息随之减少,为了充分挖掘并利用高分辨率遥感影像丰富的空间信息,以提高变化检测的精度,提取了纹理和形态特征与光谱特征组合构建变化检测的输入数据。
1.1.2 变化矢量特征的构建
根据纹理特征和形态特征构建的各个像元(i,j)的多源特征向量X(i,j)计算公式为
X(i,j)=[Xs(i,j),Xt(i,j),Xm(i,j)] (1)
式(1)中:Xs(i,j)表示像元的光谱特征;Xt(i,j)表示纹理特征;Xm(i,j)表示形态特征。则差值影像表示为
D(i,j)=X1(i,j)-X2(i,j) (2)
1.2 初始训练样本的获取
(1)利用构建的多源特征数据根据CVA法获取变化强度矢量图,其中变化强度矢量计算公式为

(2)计算变化强度矢量的均值M、并参考文献[20]求取变化最优阈值。
(3)根据M设定初始阈值T0,T0=M,并利用T0将变化强度矢量图分为两类:

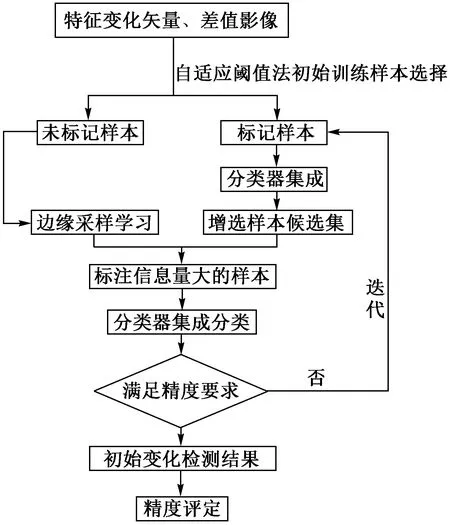
(4)求取两部分的均值Mu和Mc并计算新的阈值T,T=|(Mu+Mc)/2|。并根据终止条件e比较两阈值的绝对差,如果满足收敛条件,即|T-T0| (5)当e较小,但实际收敛结果e1较大时,即当e1>e时不同的初始阈值T0会产生两个初始阈值Tlast1和Tlast2,即阈值所在的一个范围{Tlast1,Tlast2}。 (6)根据Tlast1和Tlast2将位于初始阈值范围外的影像分为两部分: (7)求取两部分的标准差S1和S2,并计算最终阈值T。 (8)根据阈值T将变化矢量图CD归为变化和非变化像元两部分: 式(7)中,CD(i,j)和f(i,j)分别表示像元(i,j)的变化检测结果和变化矢量。 (9)通过分割对象约束对初始变化检测结果进行不确定性分析。 磨河水库属小型水库,由于工程自身规模较小,所以投入的资金和人员受相关水利部门管理限制。建设资金少、使用是否合理,人员匮乏、专业素质如何,这些因素都是严重影响磨河水库工程建设的重要因素。 式(8)中,n_c和n_uc分别表示任一对象Ri中变化和非变化像元数量;Ni表示对象Ri中像元总个数;e1i+e2i=1。 (10)分别将所有的e1i和e2i从大到小进行排序,数值越大,确定性越大,并从最确定区域随机选择准确率较高的正负训练样本作为初始训练样本。 影像分割是指利用遥感影像的光谱、纹理、形状以及空间上下文特征,将图像划分为若干个具有特征一致性且互不重叠的连通区域的过程。 分形网络演化方法(fractal net evolution approach, FNEA)是一种有效的多尺度分割算法,该算法以种子点为起始点,根据像元对象异质性最小的原则,在保证类间平均异质性最小、类内同质性最大的前提下,基于合并相邻像素或小分割对象来实现影像的分割,是一种自上而下的分割算法。对象异质性度量和尺度阈值选择是决定对象合并与终止的条件。其中异质性度量公式为 f=wcolorhcolor+wshapehshape(9) 式(9)中:hcolor表示相邻对象的光谱异质度;hshape表示相邻对象的形状异质度;wcolor和wshape分别表示相邻对象的光谱和形状异质度权重,wshape+wcolor=1。 实验中利用的是易康自带的FNEA算法对两时相叠加后影像进行分割,通过设置分割尺度(scale),紧致度(compactness)和形状(shape)参数对影像进行分割,并且利用空间信息和位置信息提取具有不同标签值(Label)对象的索引来对栅格数据进行处理,对每个对象Ri,利用式(8)对初始变化检测结果进行约束,计算该分割对象属于非变化对象和变化对象的概率,并从最确定变化和非变化区域分别提取正负训练样本作为初始训练样本候选集,利用1.2节方法进行初始训练样本的提取。 1.4.1 增选样本候选集的构建 增选样本候选集的构建可以有效解决半监督变化检测训练学习过程中的样本标注问题。传统的多分类器集成半监督变化检测算法中,通常选择两个分类器变化检测结果一致的样本作为增选样本候选集,但是由于高分辨率遥感影像变化检测中噪声可能会被误检为伪变化像元,影响增选样本的准确度,因此首先利用多尺度分割对分类器集成变化检测结果进行约束,然后利用已经标注样本的八邻域信息与多分类器变化检测结果进行融合进行增选样本候选集的构建,这样既利用了光谱信息,也有效利用了空间信息,使增选样本结果更加可靠。 1.4.2 边缘采样的主动学习算法 在样本增选过程中,如果选择光谱特征相似的未标记样本进行标注不仅不能提高变化检测的精度,还会增加样本的冗余性进而降低变化检测的效率。因此利用主动学习算法进行增选样本选择的优化十分重要。边缘采样是样本不确定性分析的标准之一,该方法是根据样本的最大后验概率和次大后验概率的差值来描述不确定性,差值越小,不确定性越大,说明该样本的信息量越大,可分性越小,添加到训练模型中越有意义。在变化检测中只有变化和非变化两类,因此选择属于变化和非变化类别概率结果差值的绝对值最小的样本x′i进行标注,即 x′i=argmin|p(yi=c|xi)-p(yi=uc|xi)| (10) 式(10)中:c代表变化类别的标签;uc代表非变化类别的标签;p(yi=c|xi)和p(yi=uc|xi)分别表示像元xi属于变化和非变化类型的概率。 影像大小分别为700×700个像元,空间分辨率为2.1 m图2 两时相遥感影像和参考变化图Fig.2 Two-temporal images and reference map 为了提高变化检测算法的自动化程度,并且有效利用高分辨率遥感影像丰富的空间信息,构建了基于多源特征融合和主动学习的变化检测算法,并且为了充分利用机器学习的挖掘能力,将目前应用广泛的梯度提升树(gradient boosting decision tree, GBDT)、k近邻(knear neighbor, KNN)和极限随机树(extremely randomized trees, ET)作为基分类器构成集成结构。 其中实验主要分为两部分,如图1所示,首先利用1.1节所述的多源特征提取方法构建多源特征和差值影像。由于在实际应用中,初始训练样本获取较为困难,因此利用自适应阈值法和不确定性分析自动选择准确度较高的初始训练样本,并通过半监督变化检测算法获取变化检测结果,在半监督变化检测过程中,为了提高未标记样本的准确率并且减少增选样本的冗余性,通过对象约束和主动学习增选准确且信息量较大的未标记样本进行标注。 图1 算法流程Fig.1 Algorithm flowchart 利用2013年11月和2014年10月的两时相影像资源3(ZY-3)号影像进行实验有效评估算法的有效性,影像覆盖范围是江苏省部分区域,如图2(a)、图2(b)所示,参考变化图如图2(c)所示。 2.2.1 模型建立 为了有效验证本文构建的用于油气管道沿线地物变化检测算法的可行性,选择基于EM的CVA、基于ET和GBDT的同质分类器集成变化检测算法,以及基于主动学习的支持向量机(semi-SVM)半监督变化检测算法作对比,实验过程中ET和GBDT算法都是利用自适应阈值法自动选择训练样本。为减少训练样本的偶然性对变化检测结果的影响,每次实验进行5次,取平均值作为最终精度,所有实验都以整幅影像像元作为测试像元。其中在基于SVM和多分类器的半监督变化检测过程中,两种方法初始训练样本都设置为100个,迭代过程中每次增选50个,共迭代11次,都利用边缘采样的主动学习策略进行样本增选,两种方法的变化检测精度曲线如图3所示,图中Semi-SVM表示基于半监督SVM的变化检测算法,Semi-ensemble表示本文提出的基于多分类器集成和主动学习的半监督变化检测算法。 图3 半监督变化检测算法精度变化曲线Fig.3 Precision trend of semi-supervised methods 通过图3可以看出,半监督SVM变化检测算法在迭代到第8次时精度趋于平稳状态,总体精度低于本文所提的变化检测算法,因此也说明了多分类器集成结构相对于单分类器来说挖掘能力更强。 2.2.2 精度评定 图4所示为不同变化检测算法和参考变化图。通过图4(a)可以看出,基于CVA的非监督变化检测算法中存在较多噪声影响产生的虚检像元,如绿色框区域。通过图4(b)~图4(e)检测结果中可以看出,在红色框区域所示的裸土变为道路部分,基于ET[图4(b)]和GBDT算法[图4(c)]漏检了大量像元,基于SVM半监督变化检测算法[图4(d)]稍微得到改善,漏检像元数量有所减少,而本文构建的基于主动学习的多分类器集成结构[图4(e)]对于这些区域的检测效果得到了明显提升,并且虚检现象也得到较大改进,因此可以有效应用于油气管道沿线地物变化情况研究。 为了定量地评估不同算法的有效性,利用总体精度、Kappa系数、虚检率、漏检率和误检像元数量5种评价指标来进行精度评定。表1列出了不同变化检测算法的检测精度,通过实验结果可以看出本文构建的变化检测算法总体精度为0.947 7,Kappa系数为0.703 6,具有比其他算法更高的变化检测精度,更低的虚检率和漏检率。相比其他变化检测算法总体精度分别提高了2%~4%,Kappa系数提高了约0.23,并且,通过误检像元数量可以看出,相对于对比实验来说,本文提出的方法误检像元数量减少很多,因此说明了该方法的可行性和有效性。 针对油气管道外界环境越来越复杂、外界环境变化引起的油气管道泄漏事故频发等现象,研究了基于卫星遥感的油气管道沿线地物变化检测算法。为综合利用非监督变化检测和监督变化检测各自的优点,在提高变化检测的自动化程度减少训练样本标注成本的同时,提高变化检测的精度。构建了基于主动学习的半监督变化检测算法,在该算法结构中,为了充分利用分类器挖掘信息的能力,利用GBDT、kNN和ET构建了分类器集成结构,并且利用边缘采样的主动学习方法进行训练样本的增选。通过实验结果可知,该变化检测框架在减少训练样本标注的同时,提高了变化检测的精度,可以有效检测油气管道沿线地物变化情况。为了验证算法的有效性,利用两景基于ZY-3影像的融合后高分辨率遥感影像进行实验,通过对比实验结果可知本文构建的变化检测算法不仅减少了训练样本标注成本,而且精度优于其他方法。


1.3 多尺度分割
1.4 训练样本增选策略

1.5 算法流程
2 实验结果与分析
2.1 实验数据
2.2 实验过程

3 结论
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31 08:58:30
河北地质(2021年1期)2021-07-21 08:16:12
科技创新与应用(2020年6期)2020-02-29 10:39:27
中国生物医学工程学报(2019年5期)2019-07-16 07:56:46
电子测试(2018年1期)2018-04-18 11:52:35
中南林业科技大学学报(2017年12期)2017-12-19 06:32:55
北京理工大学学报(2016年6期)2016-11-22 11:17:22
光学精密工程(2016年4期)2016-11-07 09:05:00
光学精密工程(2016年3期)2016-11-07 09:03:33
电视技术(2016年9期)2016-10-17 09:13:41
