飞行器半实物仿真装备研究进展与展望
2020-07-28 01:23杨宝庆
宇航学报 2020年6期
杨宝庆,马 杰,姚 郁
(1. 哈尔滨工业大学航天学院,哈尔滨 150001;2. 哈尔滨工程大学,哈尔滨 150001)
0 引 言
随着精确制导武器及其仿真技术的发展,导弹制导控制系统性能试验与鉴定越来越依赖于半实物仿真技术[1-3]。在导弹等飞行器研制过程中,通常会在试飞前进行地面半实物仿真。半实物仿真亦称为数学-物理仿真,是指把所研究系统的部分实体接入仿真试验回路中的一种仿真方法[4-5]。制导武器系统全物理仿真试验危险性大,成本高,对环境条件要求苛刻,而半实物仿真技术则可以在没有实际飞行的状态下,全方位、重复性地测试制导系统,极大地降低了开发成本和风险。因此,国内外很多研究机构都建设了半实物仿真实验室。仿真转台作为半实物仿真系统的组成部分之一,在实现弹体姿态模拟、弹-目相对运动模拟等方面扮演着非常重要的角色[6-7]。
国外专业生产转台的单位主要有瑞士的Acutronic公司,美国的CGC(Contraves-Goerz Corporation现己改组)公司、Carco公司(Carco Electronics,现已并入Acutronic)、德国的MBB公司等[8]。国内也有很多研究机构和高校在从事转台的研究与开发,例如哈尔滨工业大学、北京长城计量测试技术研究所、北京航空精密机械研究所、九江精密测试技术研究所、北京航天控制仪器研究所、北京航天计量测试技术研究所、南京航空航天大学等。
本文将从光学制导仿真、射频制导仿真、复合制导仿真等方面简要介绍国内外半实物仿真装备研制进展,提出全角度空间制导仿真、特殊环境/背景制导仿真、绕飞伴飞仿真、弹体气动伺服弹性仿真等特殊背景的半实物仿真方案,并基于飞行器制导控制的发展预测,对飞行器制导仿真装备的发展方向进行预测和展望。
1 光学/射频及复合制导仿真装备研究进展
1.1 光学制导仿真装备
一般情况下,在光学制导仿真试验中,目标模拟器和导引头安装在五轴转台上,实现弹体姿态和弹目相对运动的模拟。目前用于光学制导仿真的五轴转台主要有分体式结构、同轴套装结构两大类。分体式五轴转台的典型结构有龙门架式和卧式分体结构。国内早期五轴转台大多采用图1所示的龙门架式结构,国外的五轴转台一直采用卧式分体式结构,如图2所示瑞士ACUTRONIC公司研制的五轴转台。龙门架结构和卧式分体式五轴台的共同特点是模拟弹体姿态运动的三轴转台和目标两轴转台相互独立,三轴转台的回转中心与两轴转台的回转中心重合度依赖于机械装配精度,导致五轴转台的五轴垂直度、五轴相交度指标难以提高,影响半实物仿真试验可信度;此外,图1和图2两轴结构的五轴转台规模过大,受结构形式导致的机械干涉影响,目标两轴台的高低轴和方位轴转角范围一般不超过50°,无法模拟大范围的弹目相对运动,不能满足大角度范围的全弹道仿真需求。
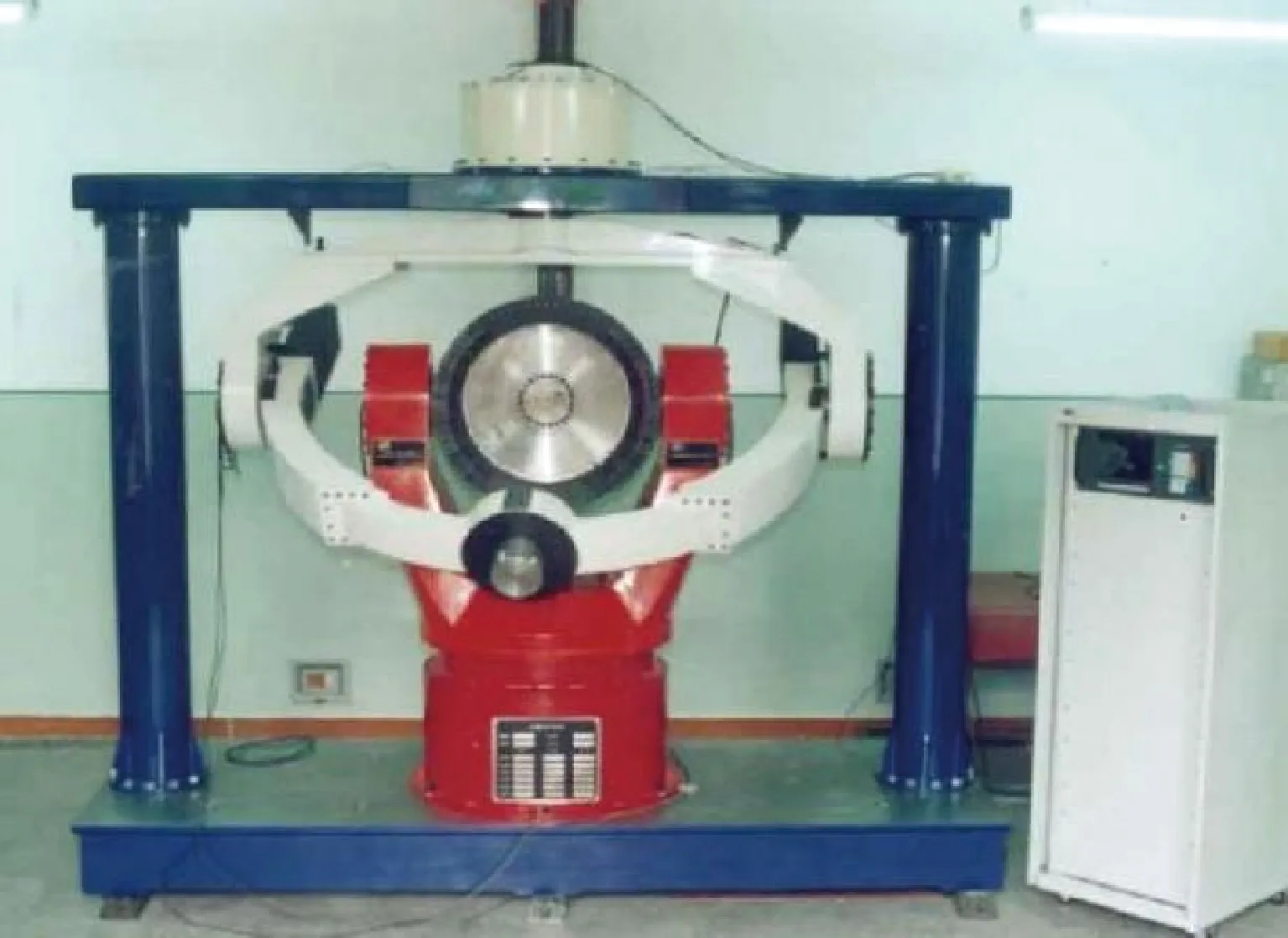
图1 龙门架式五轴转台Fig.1 Five-axis simulator with a gantry

图2 卧式分体式五轴转台Fig.2 Five-axis separated horizontal simulator
为解决大角度范围全弹道光学制导仿真需求问题,哈尔滨工业大学2005年首次提出了同轴套装结构五轴转台方案。同轴套装五轴转台分为卧式同轴套装五轴转台和立式同轴套装五轴转台,分别如图3和图4所示。
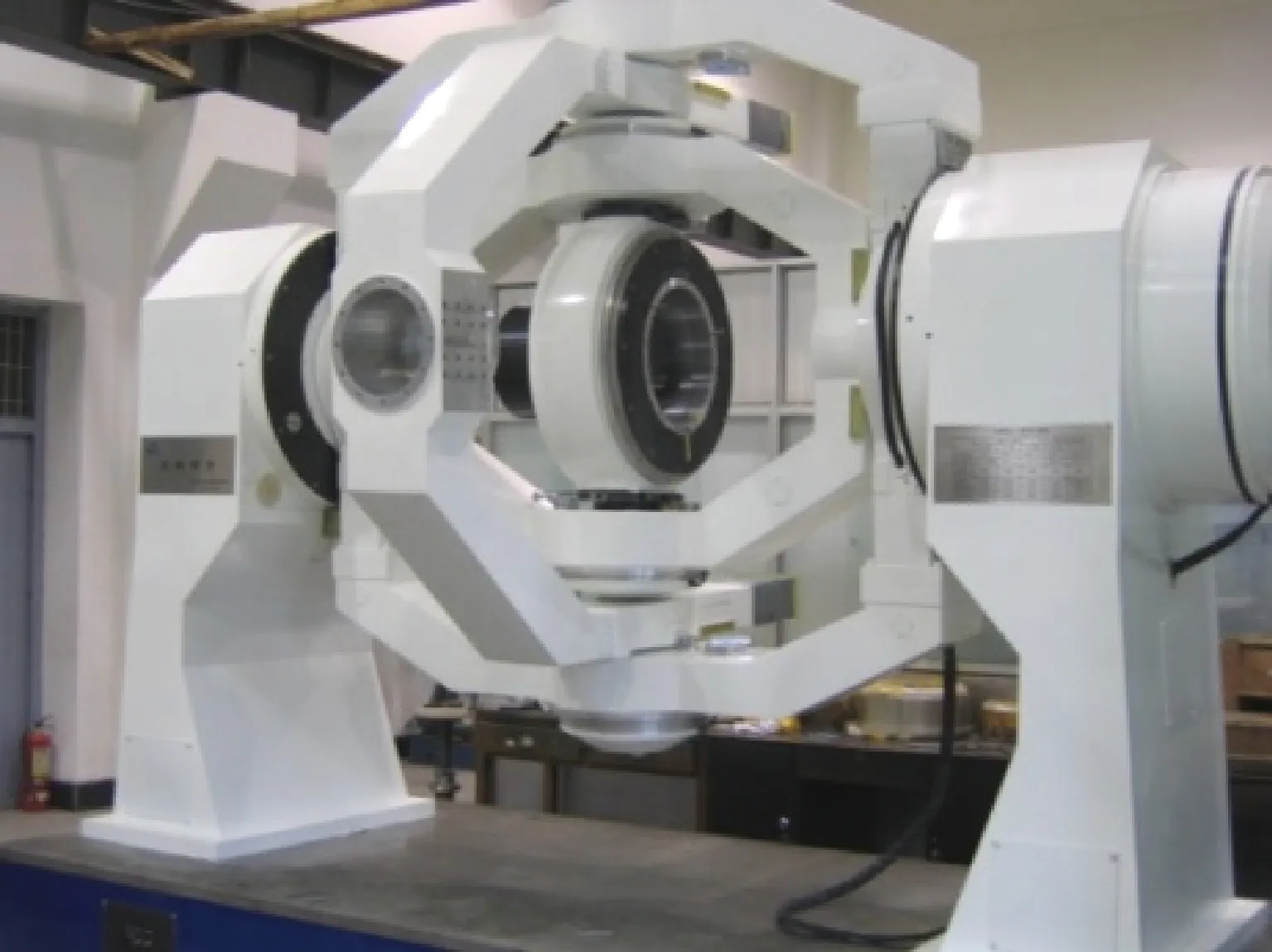
图3 卧式同轴套装五轴转台Fig.3 Five-axis horizontal coaxial simulator
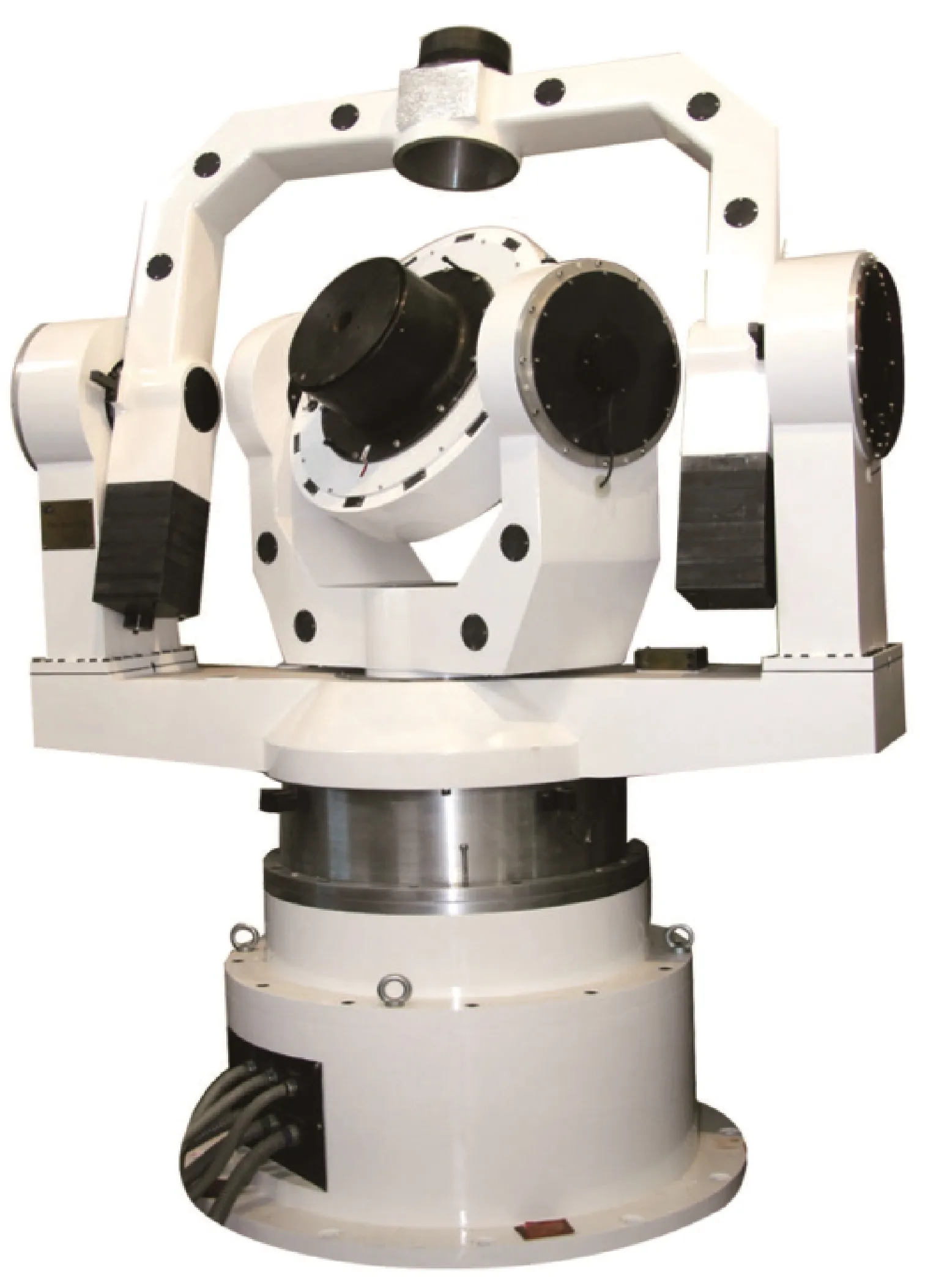
图4 立式同轴套装五轴转台Fig.4 Five-axis vertical coaxial simulator
卧式同轴套装五轴转台的内部是一个卧式三轴转台,外部是卧式两轴转台,共同构成五轴转台。由于内部三轴转台的俯仰框架和外部两轴台高低框架采用同轴套装形式,使得三轴转台的回转中心和两轴转台的回转中心重合,显著提高了五轴相交度和垂直度等机械指标。更重要的是,卧式同轴套装五轴转台在俯仰轴线方向不存在框架机械干涉,目标两轴转台的高低轴转角范围可大于±150°,满足绝大多数垂发及对地垂直攻击等制导仿真试验需求。立式同轴套装五轴转台与卧式同轴套装五轴转台类似,如图4所示,其内部三轴转台的偏航框架和外部的两轴转台方位框架采用同轴套装结构,目标两轴转台的方位运动范围大于±150°,可以满足实现大角度巡航攻击等制导仿真试验需求。此外,带有套装结构的五轴转台,具有结构紧凑,规模小的特点,可最大限度地减小各轴系的转动惯量,更有利于实现转台的高动态指标。需要说明的是,受机械结构的限制,不可能同时实现目标方位和高低的大角度运动模拟,可以根据弹道仿真需求选择卧式或立式同轴套装五轴转台。
同轴套装技术的发明是光学制导仿真装备领域发展的一个重要里程碑。目前国内采用同轴套装结构五轴转台实现的光学制导仿真系统40余套,在绝大多数飞行器研制单位都有应用。出于知识产权等方面的考虑,目前在国际上尚未有同轴套装结构五轴转台的产品介绍。
1.2 射频制导仿真装备
射频制导仿真需要在射频暗室内进行,射频制导仿真用三轴转台与一般三轴转台相比,最主要的差别主要体现在射频仿真视场要求严格,导引头一般需要采用“后坐”方式安装,瑞士ACUTRONIC公司研制的射频仿真用卧式三轴转台如图5所示。从图中不难看出,因为负载采用“后坐”的安装方式,导致转台偏载严重,特别是当俯仰轴处于90°位置时,偏载情况最为严重,因此,很多射频制导仿真转台采用液压驱动方式[9-12]。

图5 卧式三轴转台Fig.5 Three-axis vertical simulator
随着电机及驱动技术的发展,全电动射频仿真转台得到了一定的发展。国内多家单位均采用图6所示的射频仿真转台,滚转、俯仰和偏航轴可实现8000 (°/s)2、4000 (°/s)2、4000 (°/s)2的高角加速度指标,偏航电机峰值力矩约40000 Nm。

图6 射频仿真转台Fig.6 RF simulator
1.3 复合制导仿真装备
1) 光学/视频复合制导仿真装备
为了应对复杂战场环境,单一制导探测体制已经力不从心,需要发展多模探测制导。光学和射频是目前最有效、最成熟的探测手段,因此,发展光学/射频复合制导是必然趋势。传统的光学制导仿真和射频制导仿真都是独立进行的,现有的红外/射频复合制导仿真一般分为两种复合制导仿真方式:紧缩场方式和暗室射频阵列方式。
美国海军空战中心从20世纪80年代就开始了光学/射频复合制导半实物仿真研究[13-17],主要经历了4个阶段:在射频天线内安装微型红外辐射源、射频天线与红外源组合、双目标与圆弧导轨、射频紧缩场加五轴转台[4-5],如图7所示。其中,前三种方式都是从调整目标源角度出发,一般在暗室内采用传统的三轴台即可。射频紧缩场加五轴台方式又分为两种,即带波束合成器和不带波束合成器。采用紧缩场加五轴转台复合方案的主要缺点是用于非共轴的光学/射频双模导引头的光学准直系统都很庞大,导致五轴台负载很大,很难实现高动态指标。美国海军空战中心、Eglin空军基地、约翰斯·霍普金斯大学、导弹司令部等已建有红外/射频复合制导仿真系统[18],其复合目标基本上都是采用波束合成器,射频阵列发出的微波辐射透过波束组合器到达探测器,而红外目标/背景模拟器发出的红外辐射经过波束组合器反射后到达探测器。
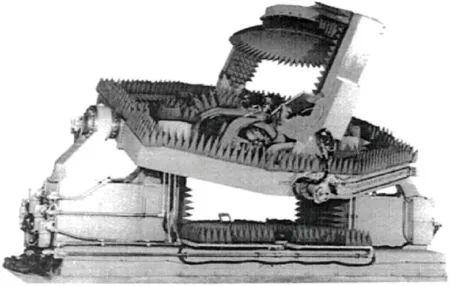
图7 紧缩场附加五轴转台复合制导半实物仿真系统Fig.7 Combined guidance HWIL based on compact filed and five-axis simulator
美国Eglin空军基地、约翰斯·霍普金斯大学、导弹司令部则采用了类似图8所示的复合制导仿真方案[19-20]。该方案的主要特点是波束合成器固定在暗室内,不随转台运动。其主要优点是光学模拟器可以做的适当大一些,三轴转台规模也可以适当降低,缺点是光学目标模拟信号通过水平旋转棱镜和垂直旋转棱镜反射到导引头,一般只能模拟±5°左右的角度范围。为了减少对暗室特性的影响,波束合成器的支撑结构必须采用非金属材料。而且,由于波束合成器较大,受到目前工艺限制,需要拼接形成,拼接对射频信号和光学信号的影响需要进一步评估。
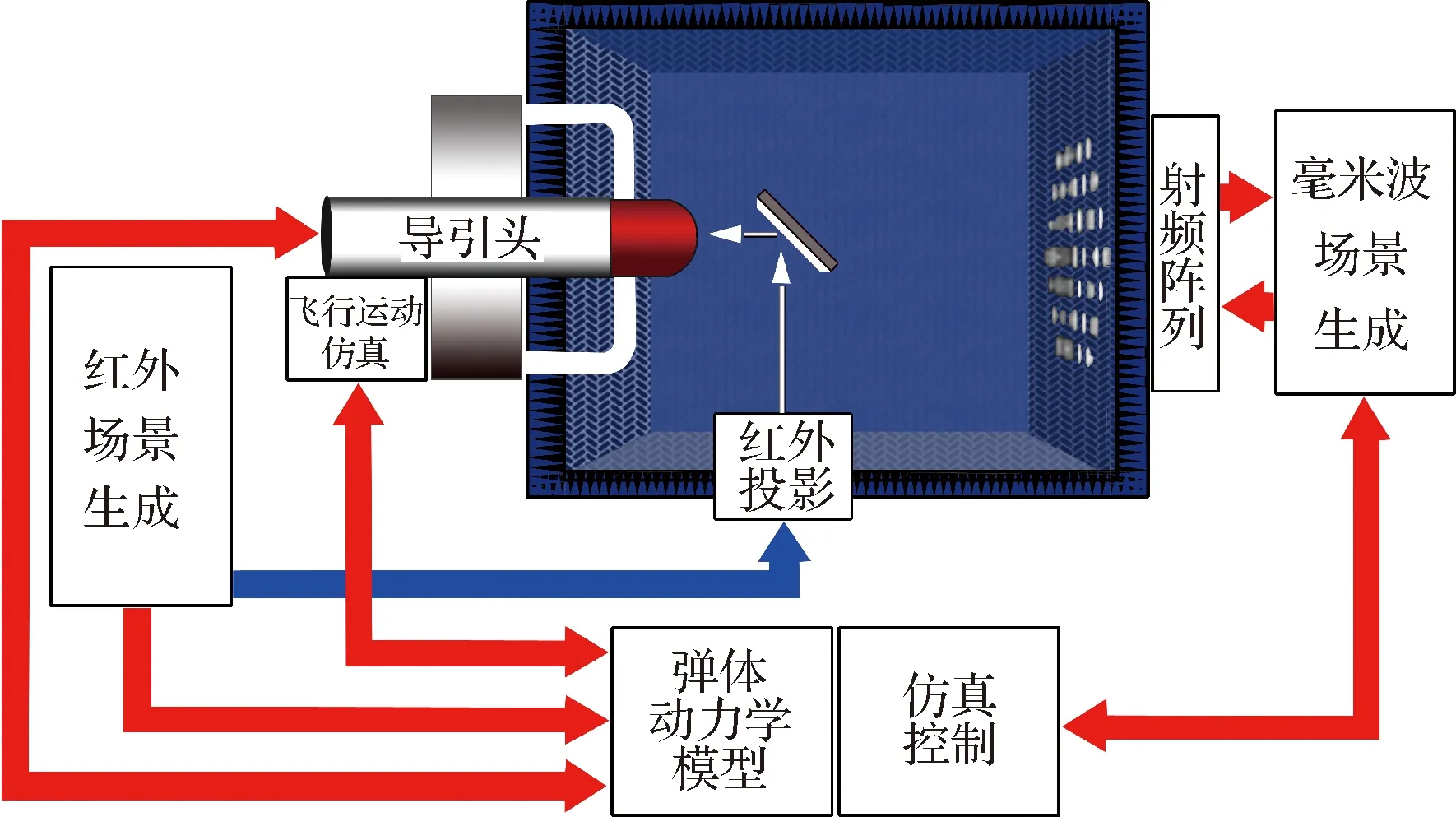
图8 复合制导方案Fig.8 Combined guidance simulation scheme
2) 红外/激光复合制导仿真装备
在红外/激光复合制导半实物仿真试验方案研究中,美国陆军航空导弹研究、研制与工程中心(AMRDEC)研制了红外与激光半主动复合制导仿真系统,如图9所示。
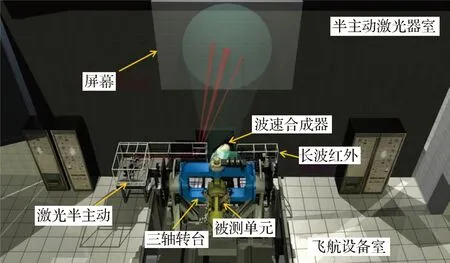
图9 红外/激光半主动复合制导仿真系统Fig.9 IR/Laser semi-active combined guidance HWIL system
图9所示系统的仿真原理与红外/射频复合制导仿真系统类似,激光模拟信号和红外模拟信号也是分别通过波束合成器透射和反射到多模导引头上,区别在于激光模拟信号是通过漫反射屏提供,因此该套仿真系统不需要暗室支持。
近年来,国内也对光学/射频复合制导仿真开展了研究,上海航天技术研究院光学/射频复合制导半实物仿真方案采用基于紧缩场与五轴转台方式,对图7所示方案有所改进。中国科学院沈阳自动化所、中航工业洪都集团等则采用图10所示的立式五轴转台复合制导仿真方案。该方案主要特点是波束合成器通过非金属支架安装在两轴转台外框架上,跟随两轴转台外框架做高低运动。光学目标模拟器倾斜安装在两轴转台外框架上,光路经波束合成器反射到导引头。贴敷吸波材料后的五轴转台工作在射频暗室内,目标阵列信号透过波束合成器后辐射到导引头。相比于紧缩场与五轴转台复合制导仿真方案,该方案中五轴转台负载小,利于实现高动态性能指标,设备规模小。该方案的主要缺点是波束合成器跟随转台运动,若其刚度不足会直接影响光束的反射和透射性能,进一步影响仿真试验的可信度。此外,相对于暗室中的三轴转台,复合制导的五轴转台规模增大,经仿真计算,五轴转台贴敷吸波材料后对暗室特性影响不大,还需要进一步完成试验验证。
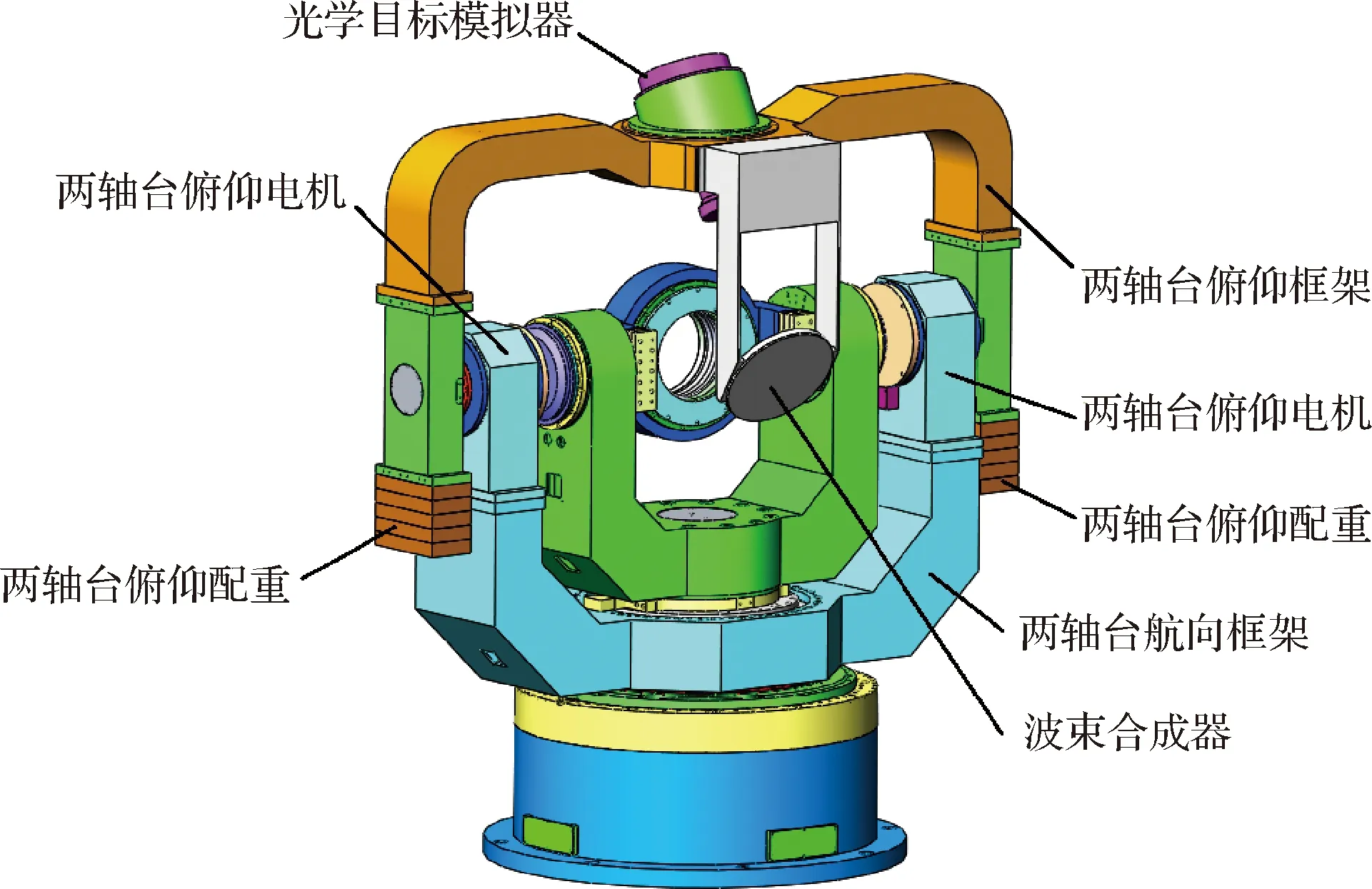
图10 立式同轴套装复合制导五轴转台Fig.10 Five-axis vertical coaxial simulator for combined guidance
3) 中-长波红外制导仿真装备
近年来,在复合制导仿真领域,还有一种中波和长波复合方式的需求,通常中波采用DMD机理目标模拟器,长波采用电阻阵目标模拟器。图11给出了一种中波和长波红外复合仿真试验的基本方案。类似于光学/射频复合制导仿真原理,该方案中中波和长波信号通过合束镜反射到导引头上。

图11 中波/长波红外复合制导仿真转台Fig.11 MWIR/LWIR combined guidance simulator
2 几类特殊应用背景的半实物仿真测试方案探讨
2.1 全姿态空间制导仿真
1)四轴转台
众所周知,无论是立式三轴转台还是卧式三轴转台都存在角位置奇异问题,对于垂直发射、对地攻击等仿真试验通常采用卧式三轴转台,而大角度范围的巡航仿真一般采用立式三轴转台。鉴于三轴转台的结构局限性,涉及到既有垂发,又有大角度巡航的仿真试验一般采用分段试验,无法一次完成全过程制导仿真。近年来,国内多家研究单位针对垂发、大角度巡航等全过程制导仿真需求,搭建了基于四轴转台的全姿态空间制导仿真系统。如图12和图13所示分别为立式四轴转台和卧式四轴转台的结构示意图。

图12 立式四轴转台Fig.12 Four-axis vertical simulator

图13 卧式四轴转台Fig.13 Four-axis horizontal simulator
四轴转台因采用冗余框架结构,可以解决三轴转台的角位置奇异问题。应用时,仿真机发出的三个姿态角位置指令经过指令分配算法,生成四轴转台四个运动轴的角位置指令。四轴转台指令分配问题是一个带有约束条件的优化问题,在优化算法的实时性方面一些学者做了大量工作,特别是结合仿真弹道趋势信息,满足实时性要求的分配算法已经获得成功应用。
2)六轴转台
在四轴转台的基础上,增加弹目相对运动模拟,即采用图14所示的六轴转台,可实现光学成像制导全姿态运动仿真试验,图中所示方案中,内部是一个卧式四轴转台,外部是目标高低和方位框架。其优点是可以实现弹体全姿态运动模拟和弹-目相对运动俯仰方向的大角度范围运动模拟。
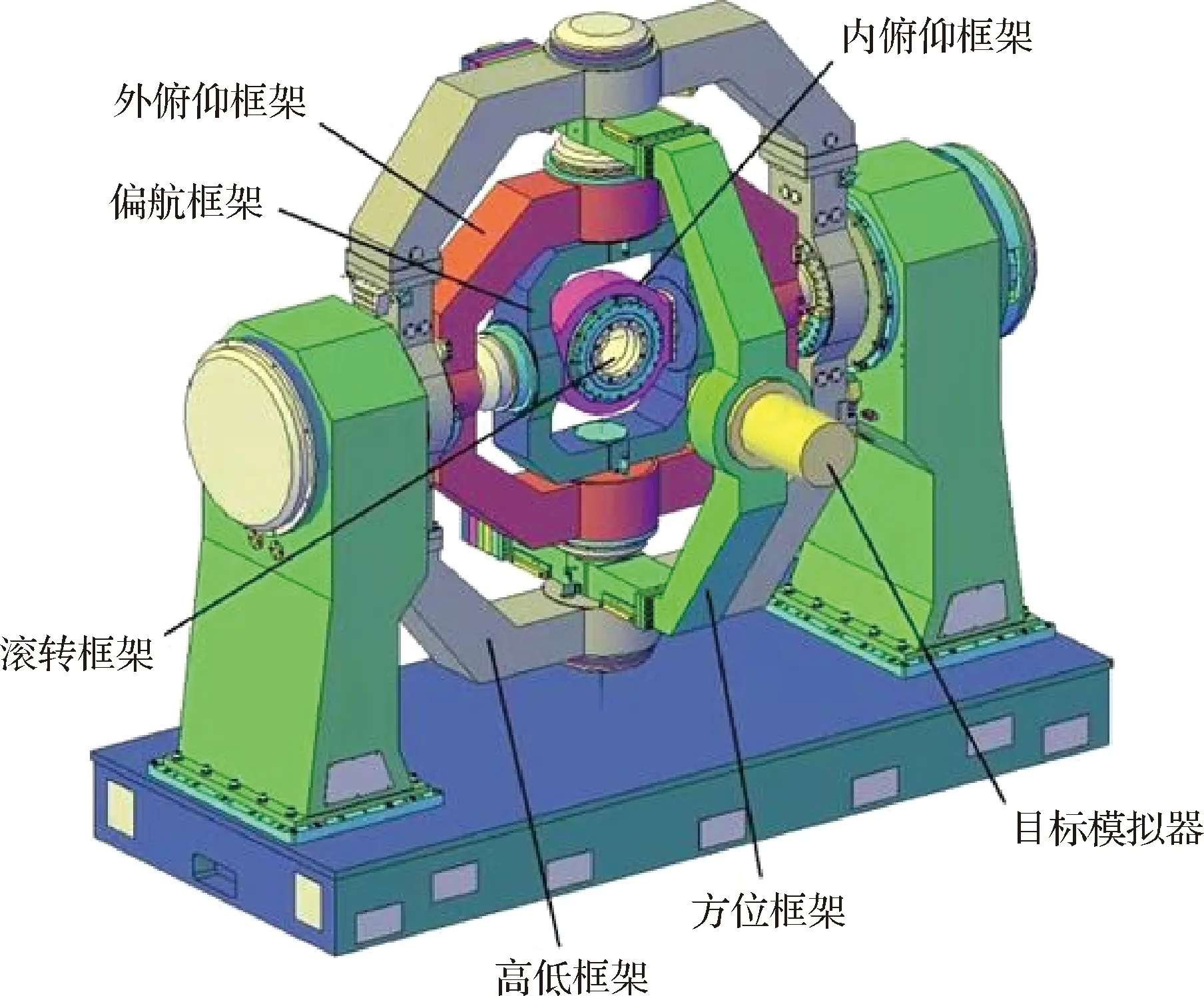
图14 卧式同轴套装六轴转台Fig.14 Six-axis horizontal coaxial simulator
2.2 特殊环境/背景制导仿真装备
1)特殊环境下的制导仿真装备
随着飞行器类型的多样化,其所处的环境也越来越复杂,半实物仿真及测试试验对仿真装备也提出了在运动特性、温度特性及压力特性的仿真需求。高低温环境下的运动仿真装备的研制启动得最早,研制技术也最为成熟,带有温箱的两轴转台、三轴转台已有成熟产品,此处不再赘述。
图15所示为真空高低温运动仿真转台,该两轴转台可以模拟温度范围-40°~60°,压力范围为1×10-3Pa~1×105Pa,角位置精度可达到1″。解决的关键技术问题包括:磁流体动密封技术、变摩擦条件下的高精度控制技术等。该系统可用于高精度惯性单元的测试、标定和仿真。
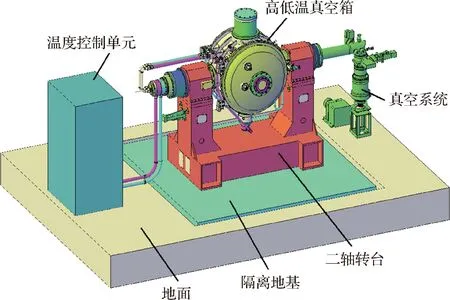
图15 真空高低温运动仿真转台Fig.15 Motion simulator with vacuum and temperature
2)带库德光路的运动仿真装备
图16所示为双色目标/干扰下的半实物仿真试验装备示意图,主要由两部分组成:带有库德光路的仿真转台和的双色目标/干扰模拟子系统。双色目标/干扰模拟子系统将目标、紫外、红外干扰光源通过光学投射系统转换成平行光。在动态仿真中,目标光源能模拟导弹目标接近过程中目标能量的变化和像斑变化,并可模拟可调节的典型目标光学特性及复杂虚拟的红外场景。双色目标/干扰模拟子系统还能够模拟导弹飞行时的红外背景及多种自然干扰或人工干扰效果。

图16 带库德光路的仿真转台Fig.16 Simulator with Coude optical system
该系统中,由于模拟的目标和干扰类型多,目标模拟子系统不能直接安装到常规的五轴转台上,只能利用带有库德光路的四镜系统(相当于目标两轴转台功能)将光束反射到导引头上,四个平面反射镜的运动可以改变多通道定向光学系统出射光束的空间指向,与仿真转台配合,可实现不同弹目相对视线角度运动模拟。因此,用于弹体姿态运动模拟的仿真转台和用于目标空间运动模拟的四镜装置组合起来,相当于常规五轴转台的功能,该系统中多面反射镜精度的调整以及多个自由度的协调控制是主要研制难点。带库德光路的仿真转台还可用于深空冷背景空间飞行器的制导仿真。
2.3 飞行器绕飞伴飞制导仿真装备
飞行器的空间交会对接、空间机械臂操作、飞行器绕飞伴飞等制导控制过程中,需要考虑目标飞行器和追踪飞行器的姿态变化及其相对位置的变化,这种情况下的仿真试验需要完成九个自由度的运动模拟。图17所示为飞行器空间绕飞伴飞九自由度运动仿真系统,目标模拟器和追踪模拟器的姿态运动模拟由三轴转台实现,二者之间的相对运动利用极坐标系下的圆周运动和半径方向上的直线运动复合实现,此方案可以显著提高运动仿真精度,降低仿真装备规模,该系统的空间指向精度优于0.02°。

图17 飞行器空间绕飞伴飞运动仿真系统Fig.17 Companion-flying or fly-around flight motion simulators
2.4 弹体气动伺服弹性仿真装备
随着对飞行器性能要求的提高,弹体气动伺服弹性越来越受到关注。近年来,提出了弹体姿态运动和弹体弹性振动复合运动仿真需求。图18给出了气动伺服弹性仿真装备方案,该方案中,采用传统三轴转台与六自由度并联机构组合的形式,三轴转台完成弹体姿态的模拟,六自由度并联机构用于弹性振动的运动模拟。图19给出了六自由度并联机构的实物图,该装置采用特殊的机械结构和执行元件,实现了不低于100 Hz的振动模拟。

图18 气动伺服弹性模拟平台Fig.18 Pneumatic servo elasticity simulators
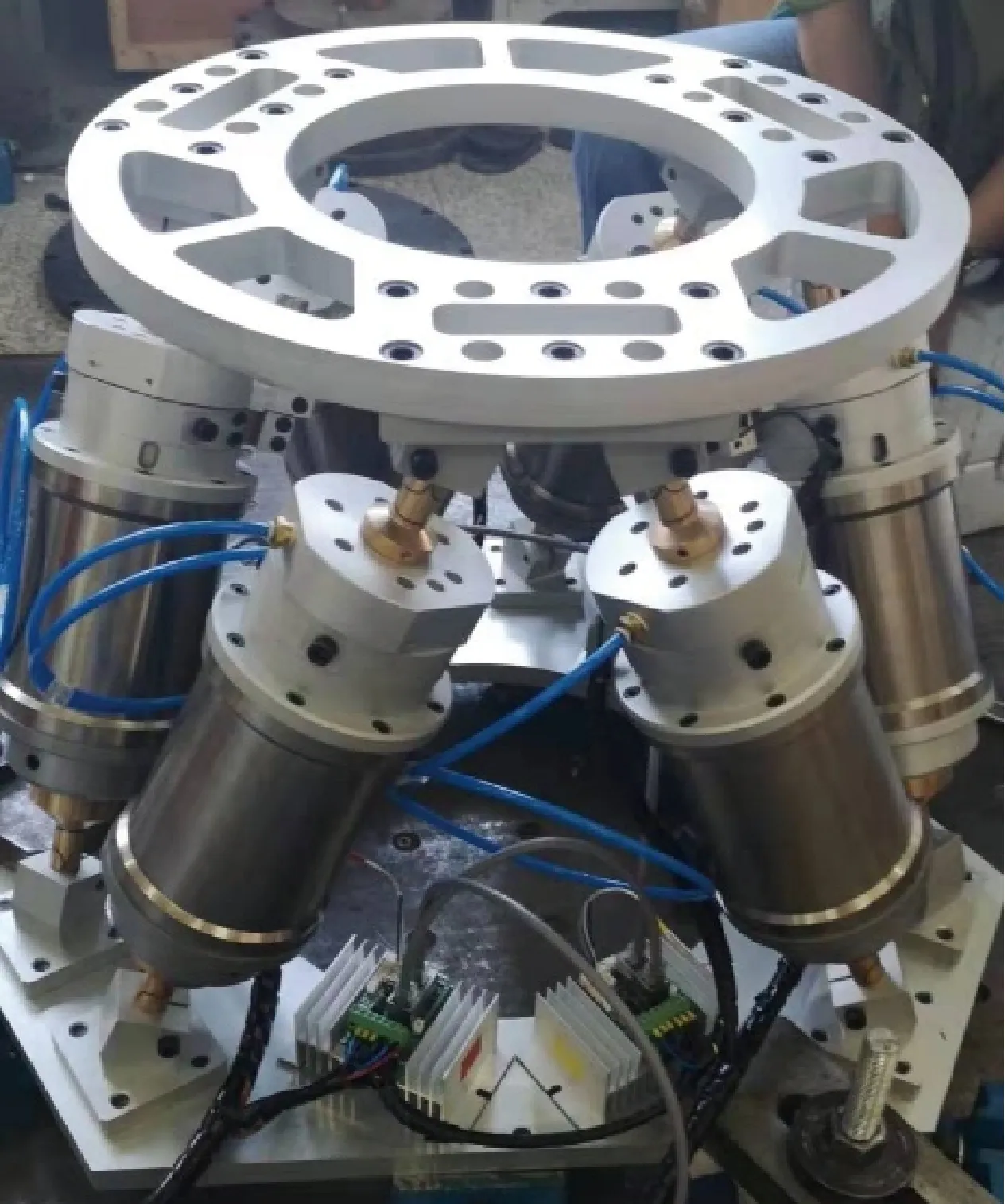
图19 六自由度并联机构Fig.19 Six-degree parallel mechanism
3 发展展望
飞行器半实物仿真试验技术的发展与飞行器技术发展密不可分。伴随着飞行器的高动态、大负载、复杂环境、高精度等未来发展方向,对飞行器半实物仿真试验技术也提出了更高需求。
1)超大负载仿真
常规转台的负载一般是惯组、导引头等部件,其安装口径一般不大于Φ700 mm,转台的运动性能可以满足绝大多数的半实物仿真试验需求。但对于光电吊舱、特殊光学载荷等超大负载,其负载安装口径不小于Φ1500 mm,这会直接导致仿真转台规模显著增大,转台的运动性能降低。当前,对于超大负载的转台装备,只能进行简单的静态测试,尚无法实现高动态运动仿真,因此,亟需发展针对超大负载的高动态运动仿真装备。
2)超高动态仿真
近年来,高动态飞行器得到了越来越多的关注,高动态飞行器对仿真转台双十频率响应提出了不低于70Hz的仿真需求,需要在挖掘常规转台性能潜力的同时,探索新型转台结构,降低转台框架的转动惯量,提升转台的动态性能。
3)协同制导半实物仿真装备
随着多弹协同攻击、无人机编队、卫星编队等方向的发展,协同制导仿真的需求越来越迫切。目前的协同制导仿真大多是基于仿真数据层面的“协同”,即分别在不同的仿真环境下进行仿真,通过光纤网络实现数据实时交互。单纯数据层面的“协同”很难真实反应实际的协同场景,且不能充分验证协同制导的相关技术。因此,需要在多飞行器旋转中心不一致、多探测体制共存、物理结构必然存在干涉情况下,探索更为理想的协同制导半实物仿真方案。
4 结 论
本文结合光学制导仿真、射频制导仿真、光学/射频复合制导仿真试验需求的不断提升,提出了几类特殊应用背景下的半实物仿真测试解决方案,且都已具有成熟的应用案例。如前所述,飞行器技术的发展直接牵引了飞行器半实物仿真技术的发展,因飞行器的种类众多,很难面向全部飞行器的技术发展,全面预测飞行器半实物仿真装备的未来发展趋势。本文所给出的三方面预测是契合当前飞行器发展亟待解决的难题。
猜你喜欢
宇航计测技术(2022年4期)2022-09-07
九江学院学报(自然科学版)(2022年2期)2022-07-02
汽车实用技术(2022年10期)2022-06-09
北京航空航天大学学报(2022年5期)2022-06-06
北京航空航天大学学报(2021年4期)2021-11-24
北京航空航天大学学报(2021年6期)2021-07-20
家庭影院技术(2021年3期)2021-05-21
办公室业务(2019年22期)2019-11-24
兵器知识(2018年2期)2018-02-08
河南教育·基教版(2016年6期)2016-06-29