基于麦克纳姆轮的车底检测系统的方案设计
2020-07-23 06:16路晓川赵加鹏田亮亮凌大鹏李航涛
科技风 2020年19期
路晓川 赵加鹏 田亮亮 凌大鹏 李航涛
摘 要: 为了提高对车辆底盘安检的效果和效率,本文设计了一个基于麦克纳姆轮的车底检测系统的方案,该系统集成在一个麦克纳姆轮驱动的小车平台上,主要由影像检测和化学检测两部分组成,其中影像检测采用线性CCD相机技术得到车底的整体图像,化学检测采用离子迁移谱(IMS)技术实现对毒品、爆炸物等违禁物品的检测。一旦有成熟的产品面世,需求量会很大,应用前景广阔。
关键词: 麦克纳姆轮;线性CCD相机;离子迁移谱
中图分类号:TP391 文献标识码:A
Scheme Design of Vehicle Bottom Detection System Based on Mecanum Wheel
Lu Xiaochuan Zhao Jiapeng Tian Liangliang Ling Dapeng Li Hangtao
The 718th Research Institute of CSIC HebeiHandan 056027
Abstract: In order to improve the effect of vehicle chassis security check,this paper designs a scheme of vehicle bottom detection system based on mecanum wheel.The system is integrated on a mecanum driven vehicle platform,which is mainly composed of image detection and chemical detection.The image detection uses linear CCD camera technology to obtain the overall image of the vehicle bottom,and the chemical detection uses ion migration spectrum(IMS)technology to detect drugs,explosives and other prohibited items.Once a mature product comes out,the demand will be large,wide application,with a good application prospects.
Key words: mecanum wheel;linear CCD camera;IMS
当今社会,大型活动的举办越来越多,安检的效果和效率就显得越来越重要,除了人员的检测外,车辆尤其是车底的检测也非常必要[1]。目前车底的检测主要分为影像检测和化学检测,这两套检测设备是分立的,影响检测效果和效率。本文所描述的方案是将影像检测和化学检测通过麦克纳姆轮这样一个平台集成到一个系统上,这套系统不仅提高了检测的便携性和安全性,还大大提高了检测效率,具有很大的应用前景。
1 麦克纳姆轮简介
该系统平台创造性地采用一种新型的轮式结构——麦克纳姆轮实现全向移动。麦克纳姆轮除了能够正常前进后退外,还能够以独特的原理实现横向平移、斜向平移、零转弯半径原地旋转,而且体积很小、高度很低,特别适合车辆底盘检查[2-3]。
2 方案设计
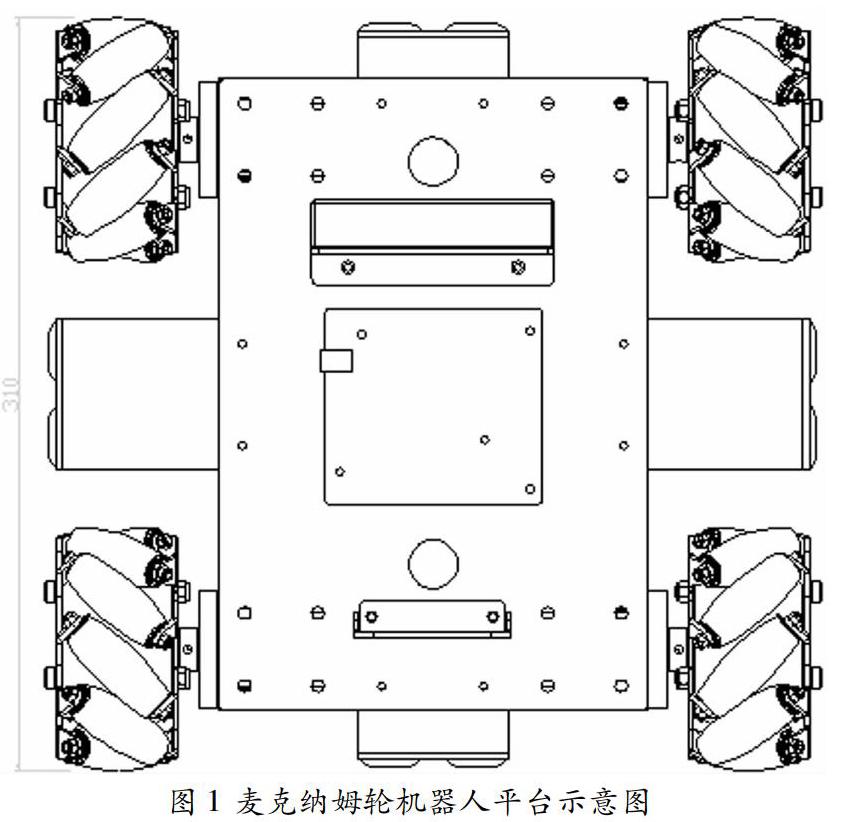
该系统的底盘是一个由4个麦克纳姆轮驱动的机器人平台,如示意图1所示。在其上面要集成影像检测和化学检测设备。
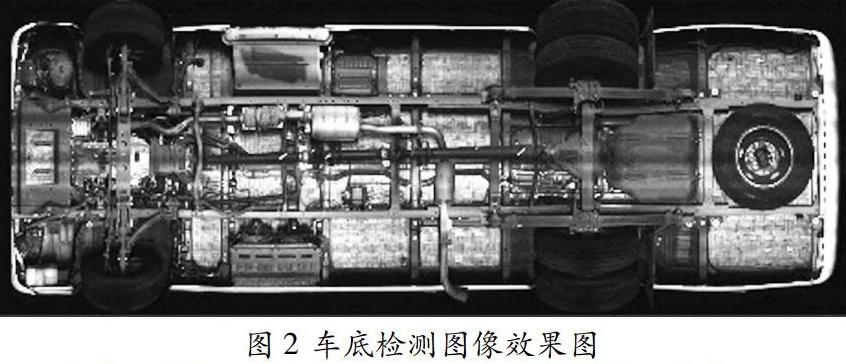
影像检测系统由线性CCD相机和视频处理模块组成,CCD相机与车辆要尽量保持相对匀速运动,通过几何校正和图像拼接等图像处理,得到车底的完整图像[4],效果如图2所示。
化学检测部分采用离子迁移谱技术(IMS)。应用该原理,目前市面上已有成熟的产品,可采购成熟的产品集成到系统平台上。
3 预期达到的社会及经济效益
随着社会经济的发展,该车底检测机器人可广泛应用于民航、海关、铁路、公路、城市轨道交通、邮政物流、公安司法、大型活动赛事等众多领域,助力保护国境安全和人民生命财产安全。一旦有成熟的产品面向市场,需求量会很大,应用前景十分广阔。
参考文献:
[1]Saeed B.Niku.Introduction to robots:analysis,control,applications(Second Edition)[M].Beijing:Publishing House of Electronics Industry,2013:2-7.
[2]楊毅.智能机器人的研究与开发[D].天津:河北工业大学硕士论文,2004:1-6.
[3]黎梦莲,耿倩蔡,王耀南,等.智能车辆安全监控系统的设计与实现[J].仪表技术,2006,6:21-24.
[4]冀翼.IMUDGPS辅助车载线阵CCD相机推扫路面图像的几何校正方法研究[D].北京:首都师范大学,2008:26-33.
作者简介: 路晓川(1990—),男,硕士,助理工程师,2016年7月毕业于中科院电子学研究所,现就职于中船718研究所第四研究室,从事质谱仪及分析仪器等的研发工作。