
三维激光雷达在汽车辅助驾驶中的应用分析
2020-07-22 09:57江勇捷蓝丽金
数字技术与应用 2020年6期
江勇捷 蓝丽金
摘要:在现如今车辆驾驶系统蓬勃发展的背景下,无人车辆驾驶是其发展的重要趋势,而三维激光雷达正是汽车实现无人驾驶的关键所在。用于精准、快速获取三维空间信息的激光雷达传感器有着目标识别、分类及三维成像等方面的技术优势,其应用范围和发展前景十分广阔。随着现代无人驾驶技术越来越趋向于多种传感器相互融合探测发展,三维成像的发展也更趋向于主、被动成像相结合,以获取丰富的目标信息。
关键词:智能汽车;三维激光雷达;辅助驾驶
中图分类号:TP391 文献标识码:A 文章编号:1007-9416(2020)06-0000-00
0引言
随着社会日渐信息化和飞速发展的智能化,现代家庭几乎每家每户都拥有车辆,为了便利和舒适很多人会选择汽车作为交通工具,但它的使用也会带来一些交通安全问题。因此,当下亟待解决的核心问题是如何提高车辆的安全驾驶性能和降低交通事故发生率,而安全辅助驾驶系统正是顺应了该应用潮流,在保证安全驾驶的目标上,如何使车辆能够精准识别道路与车辆或障碍是其领域的一个重要的技术核心。利用车辆辅助系统来提高道路交通的安全程度,己然成为未来交通运输的发展方向。通过先进的技术手段辅助驾驶任务,为汽车提供更加完善的辅助驾驶功能,逐步去实现汽车的智能化,并最终走向完全无人驾驶的智能汽车的辅助系统,必将是解决交通安全问题的有效途径[1]。三维激光雷达的应用是智能车辆安全辅助驾驶系统的重要研究内容,对于减少车辆交通事故,提高车辆的道路行驶安
全具有重要意义。
1系统总架构
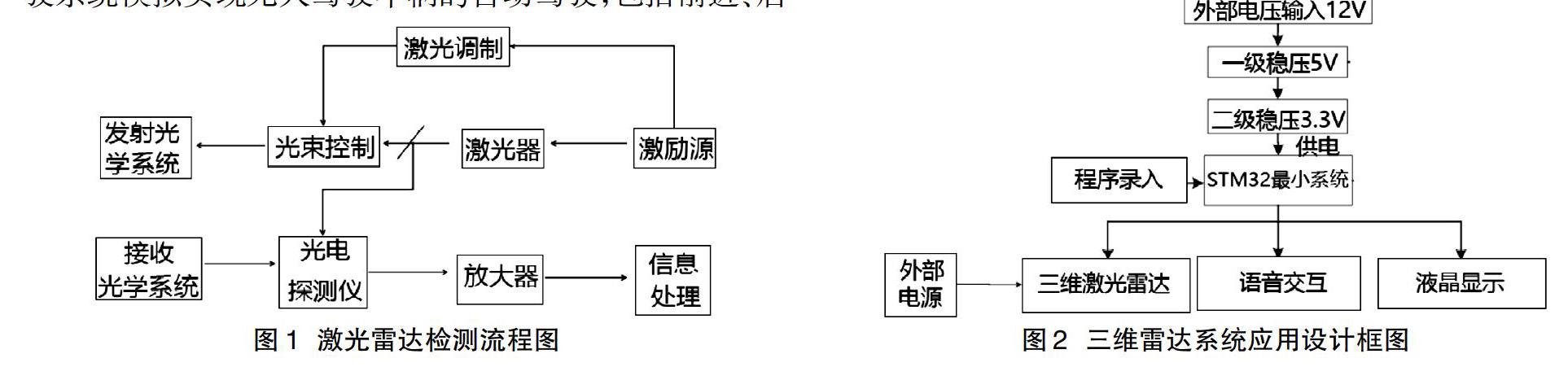
在该项目研究中,基于三维激光雷达建模的无人车驾驶系统模拟实现无人驾驶车辆的自动驾驶,包括前进、后退、转弯、减速、制动等功能,采用激光测距方法、三维激光雷达扫描建模方法等建立无人车辆行驶周围的环境,通过摄像头识别周围环境的物体进行进一步的识别和分析,综合各个传感器信息,并把该信息采集回来传递给主控中心,结合GPS定位系统实现无人驾驶车辆的实时地位和导航,增加语音播报进行交互设计,实现该系统的整体功能。在国内外,智能驾驶与无人驾驶领域中,已经提出多种实施手段和算法,但以三维激光雷达为基础的传感器是其关键。激光雷达检测流程图如图1所示。
激光三维成像是在精准检测每个二维每个像素点距离的基础上,同步测量每个测距点的方向和位置。单点的扫描和面阵器件成像是获取方位信息的两种有效方式 [2]。
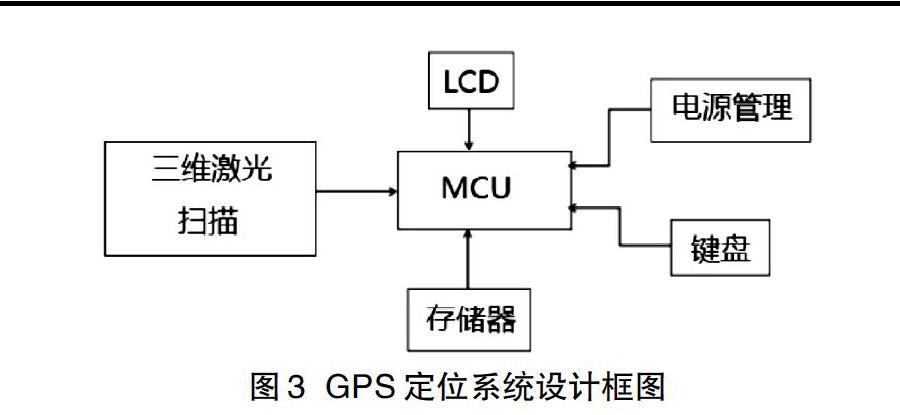
在扫描式三维成像激光雷达系统由单点激光测距系统和光束扫描装置构成,是目前发展较为成熟的三维成像激光雷达技术,其广泛应用在地形测绘、汽车导航及防撞、汽车的辅助驾驶等领域。直接脉冲方式检测的应用可以實现扫描式三维激光雷达在每个点的迅速测距。扫描装置用来控制雷达光轴指向不同方向,并依次完成目标上各点距离的测量,同时记录下光束指向的方位-俯仰角,这样获取的目标距离、角度和角度图像就是三维图像。值得注意的是,发射光轴与接收光轴作为激光雷达系统的两个相互平行的光轴,要求激光雷达工作时扫描装置应同步扫描这两平行光轴,因而一般情况下扫描雷达设计为发射-接收同轴,且扫描镜的光学有效孔径不能过小[3],如图2所示为三维雷达系统应用设计框图。
2 三维激光扫描的应用分析
在雷达型号的选择上,有着更多的选择性。星载成像激光雷达、机载成像激光雷达与车载成像激光雷达都求着其实用性与可靠性[4]。
星载成像激光雷达主要用于空间交会对接、飞行器的导航着陆以及星载对地三维成像等。星载激光雷达需要探测的距离较远(400km左右),对系统的发射功率和接收口径有高的要求。同时,星载激光雷达有着平台载荷的限制,对系统的体积、功耗、质量又有着严格的约束,因此有更高灵敏度的光子计数激光雷达便逐渐成为其技术发展方向。在不断对三维成像效果和要求提高下,应用在星载的激光雷达系统逐渐从单点探测向着线阵推扫或者面阵式成像发展,也不断提高系统的横向分辨率和测距精度,系统的发展越来越成熟。虽然其性能可靠,但其价格昂贵,不适用于本次设计使用。三维激光扫描的简要应用框图如图3所示。
机载成像激光雷达主要的应用研究领域有地形测绘、电力巡线、水下探测、遮蔽目标探测等。机载扫描成像激光雷达系统因其特性,是目前应用较为广泛的系统,成熟应用在各个领域,特别是在城市地形测绘、水下探测、电力巡线等领域有广泛的应用。但其较远的探测距离也着实增加了其制造成本,在无人车上的使用也是无法完全发挥机载成像激光雷达的能力,故在此不推荐使用[5]。
车载激光雷达成像系统应用在不同的场合下,一般采取直接探测的方式,具有着探测距离远、成像视场宽的优点,且在价格上相对另外两中类型雷达更为合适与汽车安装使用。星载、机载、车载等领域都有着不可替代的位置,但其性能与价格在实际应用上有着显著差别。由于激光雷达系统成像中单点扫描成像速度较为慢,激光雷达成像系统将面阵扫描与线阵推扫式成像逐步代替单点扫描成像,扫描成像激光雷达系统探测器中的线性探测器不断被子计数探测器取代,后者具有更高的灵敏度,从而达到小体积、轻重量、低功耗的特点。
3结语
近年来汽车工业的发展日新月异,无人驾驶系统在汽车安全驾驶的应用中也是备受关注,先进的雷达和稳定的系统便成为各大汽车生产公司的关注点。在总结了星载成像激光雷达、机载成像激光雷达与车载成像激光雷达的性能,其在汽车应用上的可靠性、可行性与优劣的对比分析后可以见得,车载成像激光雷达探测范围符合实际驾驶中的客观环境,探测视觉角度可保障汽车安全性,且体积小,价格合理,是作为汽车辅助驾驶系统的最佳选择。
参考文献
[1]刘博,于洋,姜朔.激光雷达探测及三维成像研究进展[J].光电工程,2019,46(7):21-33.
[2]李晨曦,张军,靳欣宇,等.激光雷达SLAM技术及其在无人车中的应用研究进展[J].北京联合大学学报,2017,31(4):61-69.
[3]王小珂,周勇,王钤.基于激光雷达距离图像信息的三维重构技术[J].兵工自动化,2013,32(3):85-86+89.
[4]麦新晨,杨明,王春香,等.一种基于多传感器融合的车辆检测与跟踪方法[J].上海交通大学学报,2011,45(7):1012-1016.
[5]项志宇.快速三维扫描激光雷达的设计及其系统标定[J].浙江大学学报(工学版),2006(12):2130-2133.
收稿日期:2020-04-25
*项目基金:全国大学生创新创业训练计划项目,编号:201813470001;福建省教育厅科技,编号:JAT170845。
作者简介:江勇捷(1997—),男,福建漳州人。[A1]
通讯作者:蓝丽金(1987—),女,畲族,福建龙岩人,硕士,讲师,研究方向:电气自动化。
