一种电梯导轨检修机器人的设计①
2020-07-22 08:32桑智灵曹君窦岩顾秋忆
科技创新导报 2020年15期
桑智灵 曹君 窦岩 顾秋忆
(常熟理工学院机械工程学院 江苏常熟 215500)
自从我国改革开放以后,国家经济发展迅速,人民生活水平显著提高,很多人在城市里住上了高层楼房。对于高层建筑而言,电梯是其中必不可少的一类设备,它不仅保障了人们的出行效率,更承载着千家万户的出行安全。然而在电梯检验过程中却存在各种因素因而导致了不少的事故伤害[1]。
根据相关研究表明,重视电梯的日常保养,保障重要部件的定期更换,润滑,以及调整机件的间隙,可以进一步的保障电梯的安全性,减少事故发生的频率。
目前对于电梯导轨的检修方式主要是以人工检修为主。电梯组成部件结构复杂度高,检修范围大、细小部件数量多,易造成漏检;作业强度大。检修人员长时间的进行高强度作业,这对检修人员的身心健康产生了很大的损害。工作质量也难以保障,如何提高作业效率、改善作业质量、优化检修方式是目前很让人重视的一个问题。智能电梯导轨检修机器人的投入使用可以很大程度的改善以上的问题。
电梯导轨检修机器人可以测量导轨垂直度,检查导轨的润滑度以及对关键部分的检测。电梯导轨检修机器人结合了机检的准确性,稳定性和无线传输的优点。
1 检修方案的选择
1.1 导轨垂直度的测量
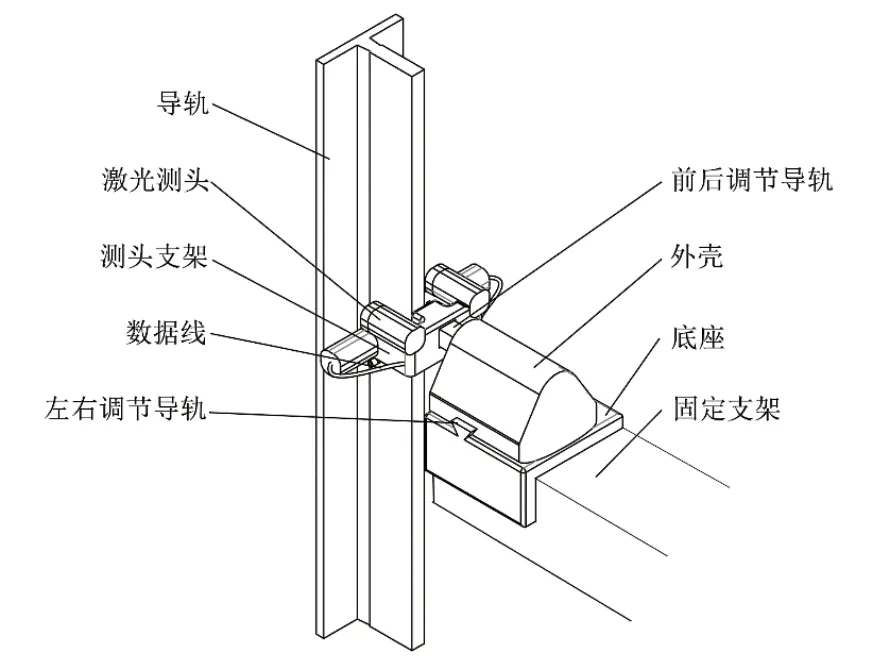
图1 电梯导轨检修机器人的结构设计
电梯的导轨是导向部件,导轨的垂直度很大程度上影响了电梯工作时的安全与舒适度。对导轨的垂直度进行相关的检测就非常的重要。目前导轨检测有有线锤检测法和激光检测法两种常用的方法[2]。但是运用上述两种方法在导轨检测中也存在精度低、受环境影响大、操作困难等缺陷。于是我们采用压力测距法来测量垂直度。检测机器人水平方向输出压力传感器,传感器实时将数据通过单片机传回终端,通过压力的变化,终端计算垂直度,从而实现导轨垂直度的测量。
1.2 导轨润滑度的处理
因电梯已经成为人们日常生活中不可或缺的一部分,大多数人可能会发现,部分电梯在下降中可能产生非常明显的震动,而这极可能是导轨或导靴表面润滑不足造成,定期保养保证导轨、导靴之间的润滑性能,可以减少电梯的震动现象[3]。
于是,我们在检修机器人与导轨的接口处设计一个出油口,检修机器人在导轨上运动的同时,出油口进行输油,从而保证导轨不会与轿厢因润滑不足而产生故障。
1.3 对关键零部件的比对检测
电梯导轨检修机器人携带全角度相机可以对关键部位进行全方位扫描,形成完整的三维图像信息,通过提前设置好的判断标准方案实现关键部位的故障识别。采用图像对比的方式检测电梯故障,即将同一电梯的相同部位零件当前图像和原始图像进行比对分析,从而得到当前电梯关键部位的图像变化信息。并依照一开始已写入终端的判断标准,通过三维图像的变化进行分析,进而生成检修报告,使检修人员可以根据报告进行维修保养。
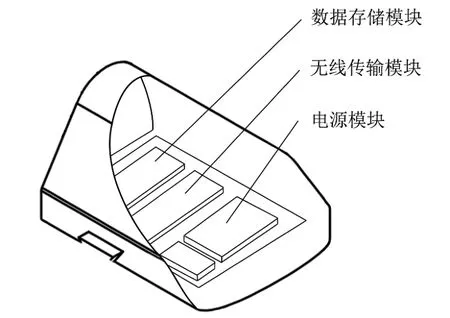
图2 电梯导轨检修机器人的机身内部示意图
2 电梯导轨检修机器人检测流程
(1)检修人员携带电梯导轨检修机器人,在核准电梯型号,检修时间等信息后,将电梯导轨检修机器人启动。该电梯的作业方案以及历史维修信息将会被电梯导轨检修机器人自动调用。
(2)电梯导轨检修机器人将依附在电梯机箱上从电梯的顶端向下运动,对指定部位进行抓拍扫描,生成完整的三维图像信息,并将此信息通过无线传输,传输给上位机。上位机会根据其与原始数据进行比对分析,寻找图像中的异常,并写入检测报告中。
(3)电梯导轨检修机器人在运动的同时,检测机器人水平方向输出压力传感器,传感器实时将数据通过无线传输传回终端,通过压力的变化,终端计算垂直度,从而实现导轨垂直度的测量,并且终端会根据计算结果并依照判断标准,将结果写入检测报告中。
(4)根据检测报告的提示,检修人员可以进行针对性的维修保养,维修的效率也就可以大大的提高了。
3 电梯导轨检修机器人的机械结构
3.1 电梯T形导轨结构
电梯导轨是电梯在井道内上下行驶的安全路轨,它对于轿厢运行起到了关键的导向作用[5]。电梯常用的导轨是T形导轨。GB/T 22562—2008 中推荐T形导轨材料为Q235普通碳素结构钢,电梯导轨导向面纵向粗糙度≤ 6.3 μm。T形导轨主要规格参数:导轨导向面宽度 k=9~31.75 mm,导向面高度n=30~57mm,导轨宽度b=70~140mm,导轨标准长度L=5m。
3.2 机器人的机械结构设计
电梯导轨检修机器人结构如图1所示,垂直度检测模块,润滑度模块,关键部位检测模块可以安装在机身上。电梯导轨检修机器人的动力驱动依附在机箱上,不需要内置动力模块,起到了减少体积,节省能源的作用。电梯导轨检修机器人与机箱之间用过底座和固定支架连接。前后调节导轨与左右调节导轨起到了调整的作用,可以根据不同型号的电梯T型导轨进行调改。达到了一机多用的目的。数据线的作用是将检测数据传输到机身内部的无线传输模块。
4 结语
随着科技的发展,高层建筑的增加,电梯的速度也在逐渐加快。同时对电梯乘坐的舒适性和安全性也有了很高的要求。该产品的使用将很大限度的缩短电梯检修时间,提高检测的效率,并且降低了检修人员的工作强度,具有广阔的应用前景和良好的社会效益。
猜你喜欢
中学生数理化(高中版.高考理化)(2022年3期)2022-04-26
中国特种设备安全(2019年7期)2019-09-10
当代工人(2019年24期)2019-01-17
新能源科技(2018年10期)2018-02-15
小学生学习指导(低年级)(2018年3期)2018-01-31
电子制作(2016年19期)2016-08-24
设备管理与维修(2016年5期)2016-03-16
中国石油石化(2015年12期)2015-04-20
制造技术与机床(2015年10期)2015-04-09