基于Bicycle Model和3 DOF Model的车辆行驶平顺性和操纵稳定性分析
2020-07-18 02:31罗来军
传动技术 2020年2期
罗来军 陈 博
(联创汽车电子有限公司,上海 201206)
0 引言
EPS广泛应用于各类市场车型,当前,市场对EPS的功能开发标准要求越来越高,对性能的要求也越来越严格,要求带有EPS配置的汽车,要拥有较高标准的行驶平顺性和操纵稳定性。本文基于Bicycle Model和3 DOF Model对车辆行驶平顺性和操纵稳定性进行系统动力学建模并分析,旨在对整车有更深入的了解,为更好地EPS功能开发打下基础。
1 悬架相关计算
1.1 计算前悬架刚度
悬架和轮胎弹簧上的质量能够在垂直方向上运动。悬架和轮胎弹簧串联的有效刚度称为“弹簧刚度”,确定为:
(1)
在无阻尼的情况下,车辆每个转角的反弹固有频率可以由以下公式得到:
(2)
fn为前悬架的固有频率、W为整备重量、g为重力加速度。
对于前弹簧:
(3)
其中:M为整备质量、b为前轴到重心的距离、l为轴距、Wf1为前轴载重[1]。
本文建模中,M=1000 kg,b=1.3 m,l=2.5 m,fn=1 Hz,Kt=150000 N/m,求解得出前悬架刚度Ks=9864.68 N/m。
1.2 计算后悬架刚度
对于后悬架:
(4)
其中:Wf2为后轴载重;a为后轴到重心的距离;设a=1.2 m,l=2.5 m,fn=1.2 Hz,Kt=150000 N/m,则计算后悬架刚度Ks=13402.62 N/m。
1.3 计算等效扭转刚度
设h1=0.75 m,h2=0.25 m,ms=900 kg,则总的扭转刚度为:
Kt=54984.12 N/m
又:
(5)
其中,ks|f=9864.68 N/m,ks|r=13402.62 N/m。
又设ktARB,r=0,Ts=1.3 m,则计算等效扭转刚度为:
ktARB,f=35323.25 Nm
1.4 悬架滚动阻尼的计算
(6)

2 车辆操稳平顺性动态方程解析
2.1 Linear Bicycle Model
2.1.1 模型动态方程推导
Linear Bicycle Model在状态空间形式下的方程,数学模型表示为[1]:
(7)
(8)
(9)
(10)
胎压模型:
FyF=CαF*αF
(11)
FyR=CαR*αR
(12)
(13)
(14)
因此,Linear Bicycle Model可表示为:
(15)
(16)
即:
(17)
2.1.2 过度转向系数的计算
基于稳态横摆响应的2自由度整车动力学模型的过度转向系数计算如下:
过度转向系数[2]:
(18)
CαR=2Cαtire,CαF=2Cαtire
(19)
0.44951976774783865667100760340954 deg/g
2.1.3 劳斯车辆稳定性标准
劳斯车辆稳定性标准把车辆运动状态分为以下三种情况:不足转向US(under steer),转向适中NS(neutral steer),过度转向OS(over steer)[3-5]。
稳定状态判断如下[6]:
a0,a1≥0
s2+a1s+a0=0
If:kus>0 Under Steer Vehicle;
If:kus=0 Neutral Steer Vehicle;
If:kus<0 Over Steer Vehicle.
Under Steer Vehicle:kus>0; Neutral Steer Vehicle:kus=0
1+kusu2>0
车辆一直是稳定的。
2.1.4 Linear Bicycle Model中偏航速度增益与车速的关系
偏航速度增益:
(20)


图1 偏航速度增益与车速的对比Fig.1 Yaw velocity gain vs. vehicle speed
偏航速度增益随着车速的增加而增大,当车速达到55 m/s时,速度增益随车速的增加而减小。最大偏航速度增益可以达到10.6 s-1。
2.2 Linear 3 DOF Model
横向、偏航和纵向运动方程如下:
(21)
(22)
(23)
总前轴侧向力为:
Fyf=Cαfαf+Cγfγf
(24)
(25)
δf,total=δdriver+φKSBR,f
(26)
(27)
CγfφKCBR,f
(28)
总后轴侧向力为:
Fyr=Cαrαr+Cγrγr
(29)
(30)
δr,total=φKSBR,r
(31)
(32)
(33)
Fy1+Fy2+Fy3+Fy4=2Fyf+2Fyr
(34)
Fy1+Fy3=2FyfFy2+Fy4=2Fyr
(35)
因此,得到方程式如下:
(36)
(37)
(38)
得到线性3自由度在状态空间形式下的解析式为:
(39)
其中:
(40)
(41)
a13=
(42)
(43)
(44)
(45)
a23=
(46)
(47)
(48)
(49)

(50)
(51)
3 仿真结果
在线性2自由度模型的基础上,增加了滚动运动分析,即3自由度模型的滚动运动。考虑到不同的汽车具有不同的横倾特性,横倾特性改变了计算得到的过度转向系数。
如图2(a)和图2(b)结果说明, 滚动运动在车辆的横向响应中起着关键作用,在仿真中,车辆的滚动运动会削弱车辆的横向响应[9]。因此,2自由度模型的侧向响应远强于3自由度模型。
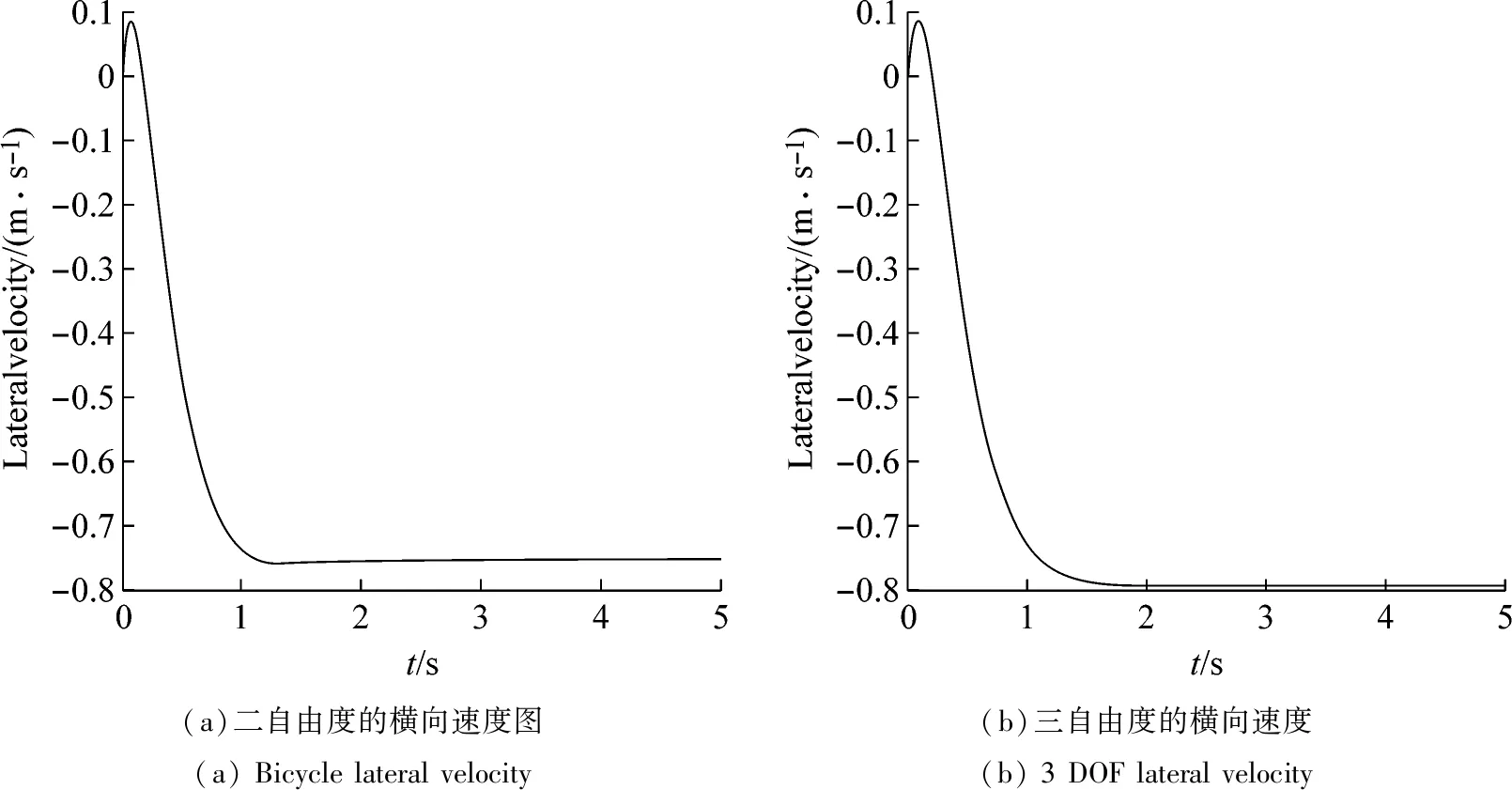
图2 二/三自由度横向速度图Fig.2 Bicycle/3 DOF lateral velocity
图3(a)和图3(b)结果说明,滚动运动在车辆的横摆响应中起着关键作用,在仿真中,车辆的滚动运动会削弱车辆的横摆响应。因此,自行车模型的偏航响应远强于3自由度模型。
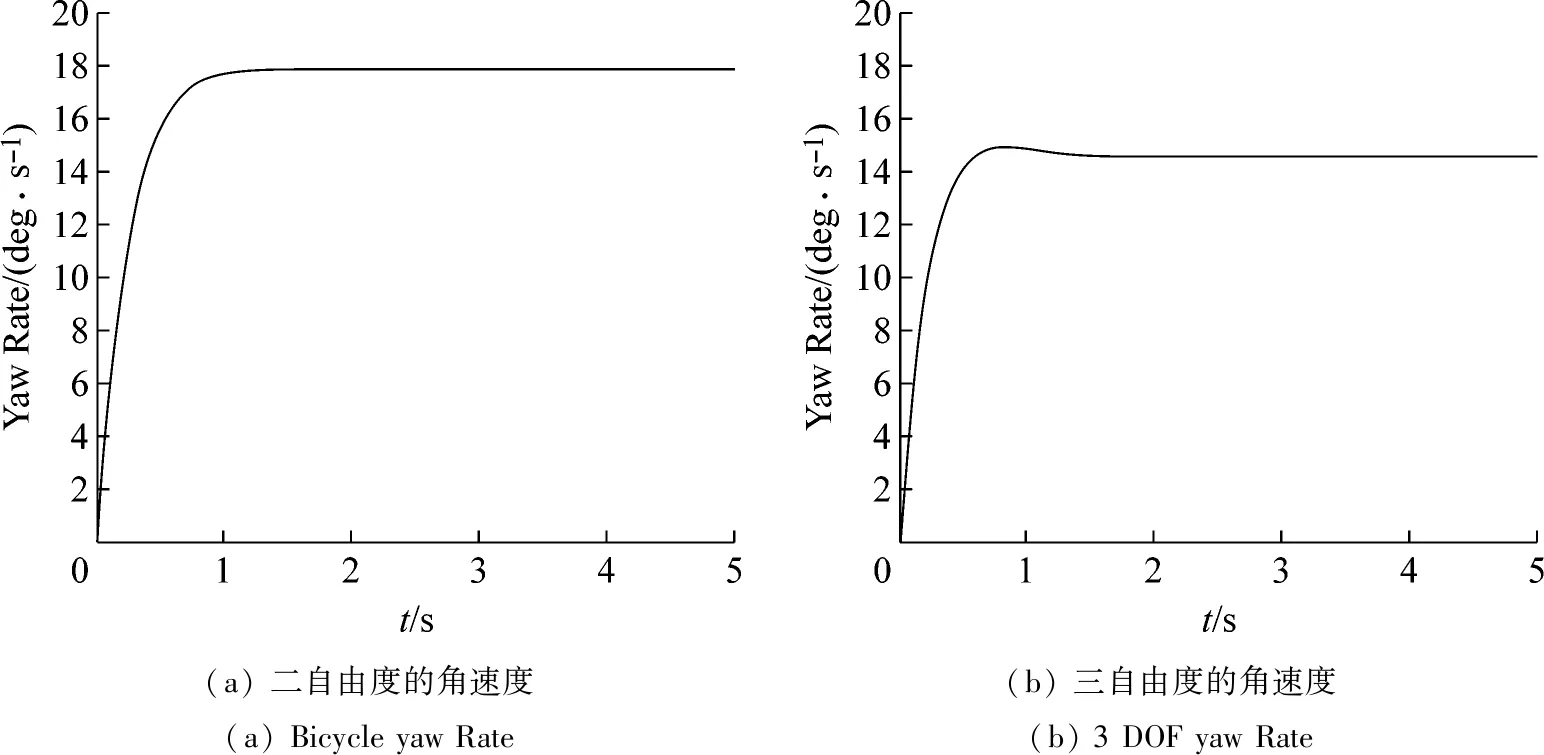
图3 二/三自由度横向角速度Fig.3 Bicycle/3 DOF yaw velocity
图4(a)和图4(b)结果说明,滚动运动在车辆横向加速度响应中起着关键作用,在仿真中,滚动横摇运动会削弱车辆的横向加速度响应。因此,自行车模型的侧向加速度响应远强于3自由度模型。
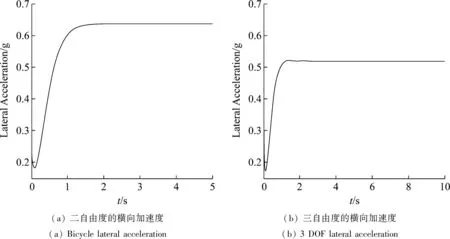
图4 二/三自由度横向角速度Fig.4 Bicycle/3 DOF lateral acceleration
图5(a)和图5(b)结果说明,滚动运动在车辆动力学响应中起着关键作用,在仿真中,滚动运动会削弱车辆的过度转向特性[10]。因此,2自由度模型的过度转向特性要比3自由度模型强得多。
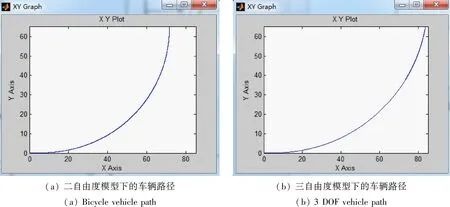
图5 二/三自由度模型下的车辆路径Fig.5 Bicycle/3 DOF vehicle path
图6(a)和图6(b)结果说明,滚动运动在车辆侧滑响应中起着关键作用,在此仿真中,滚动运动会削弱车辆侧滑响应。因此,自行车模型的车辆侧滑响应远强于3自由度模型。
图7(a)和图7(b)结果说明,滚动运动在车辆前胎侧滑响应中起着关键作用,在此仿真中,车辆的滚动运动可以增加车辆前胎侧滑响应。因此,3自由度模型的车辆前胎侧滑移响应远强于2自由度模型。
图8(a)和图8(b)结果说明,滚动运动是车辆后胎侧滑响应的关键作用,在此仿真中,车辆的滚动运动会削弱车辆后胎侧滑响应[11]。因此,二自由度模型后胎侧滑移响应远强于3自由度模型。
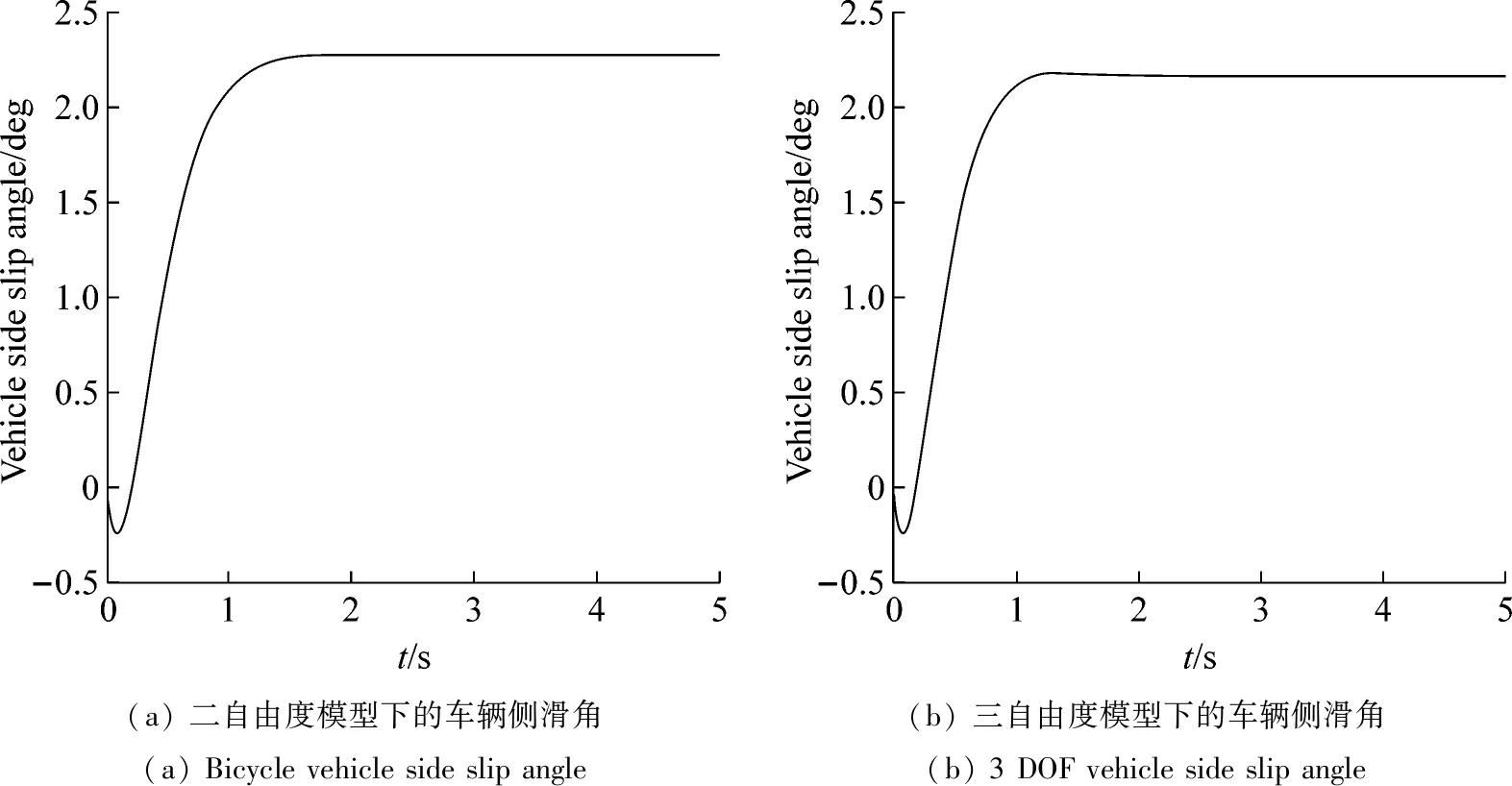
图6 二/三自由度模型下的侧滑角Fig.6 Bicycle/3 DOF vehicle side slip angle
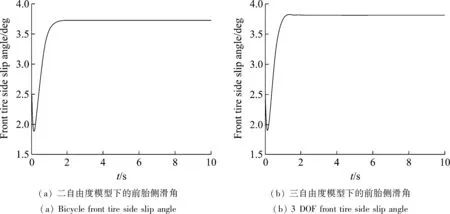
图7 二/三自由度模型下的前胎侧滑角Fig.7 Bicycle/3 DOF front tire side slip angle
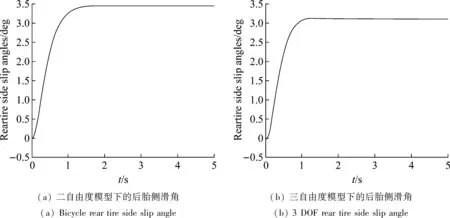
图8 二/三自由度模型下的前胎侧滑角Fig.8 Bicycle/3 DOF rear tire side slip angle
4 结论
在车辆系统动力学中,滚动阻力运动、横摆运动、横向运动共同决定了车辆运动状态。偏航率、横向速度、侧向加速度、车辆过度转向、车辆侧偏角、前后轮胎侧滑角、横摇角、滚转角速度及Wheels camber-by-roll系数和Wheels steer-by-roll是车辆的运动状态的描述量。
EPS功能开发过程中,充分了解了被控对象的动力学特性,更容易合理地根据整车属性匹配补偿功能,实现理想的驾驶平顺性和操纵稳定性目标。
猜你喜欢
军民两用技术与产品(2022年2期)2022-06-01
北京航空航天大学学报(2021年4期)2021-11-24
北京航空航天大学学报(2021年6期)2021-07-20
电子制作(2019年19期)2019-11-23
电子制作(2018年19期)2018-11-14
中国市场(2016年50期)2017-04-06
北方经贸(2017年2期)2017-04-06
智富时代(2017年3期)2017-04-02
智富时代(2017年3期)2017-04-02
电子制作(2016年1期)2016-11-07