
列车定位中GNSS的RAMS研究与评估
2020-07-13 08:53:22帅玮祎董绪荣李晓宇
铁道学报 2020年6期
帅玮祎,董绪荣,王 军,付 伟,李晓宇
(1. 航天工程大学,北京 101416;2. 北京航天飞行控制中心,北京 100096)
21世纪以来,随着我国铁路运输系统性能、经济效益等需求的不断提高,全球卫星导航系统(Global Navigation Satellite System, GNSS)被逐渐引入到列车控制系统中,可以为用户提供全天候、高实时、高精度的动、静态定位服务,同时减少铁路轨旁设备,降低铁路运营成本[1-3]。然而,在GNSS向列车定位应用延伸过程中,必须要考虑的问题就是GNSS所提供的服务性能是否满足铁路领域的应用需求。
由于各国GNSS均不是为铁路应用而设计的,因此其性能指标及评估方法与铁路领域有所区别。当前,我国铁路运输系统行业标准采用的是由欧洲电工标准化委员会发布的可靠性、可用性、可维修性和安全性(Reliable, Availability, Maintainability, Safety,RAMS)系列标准[4]。GNSS性能指标体系由四大指标组成,即精度、完好性、连续性、可用性[5]。如何将GNSS性能指标体系向RAMS映射,构建合理的评估方法,对促进GNSS在列车定位领域的应用是非常重要的。
当前,关于GNSS性能指标与RAMS指标间映射关系的研究较少,且主要集中在国外。多数研究以Filip A等于2008年提出的基于GNSS的铁路信号系统性能评估框架为基础[6-8],该框架以GNSS定位误差为基础,给出了基于GNSS的铁路信号系统可靠性、可用性的定量计算方法。文献[9]通过比较分析两类性能指标的定义和计算方法,给出了一种基于随机Petri网状态转移模型计算列车GNSS定位单元可靠性、可用性和安全性的方法。但是,上述两种方法均没有给出两类指标间的完整映射,在指标映射关系分析过程中,简单地将GNSS的完好性与RAMS的安全性等同,未考虑到指标间关系对整体映射的影响。
针对上述问题,本文从铁路用户角度出发,给出了平行递进模型下GNSS性能指标的定义及计算方法,研究了各指标间的关系;对照RAMS性能指标体系,提出了一种GNSS性能指标与RAMS指标间的完整映射关系模型,并给出了GNSS定位单元RAMS各项指标的定量计算方法;利用郑州市城市铁路沿线路段和郊区铁路沿线路段的实测数据,对车载GNSS定位单元进行了RAMS性能评估,验证了模型及算法的可行性。
1 性能指标体系概述
1.1 GNSS性能指标体系
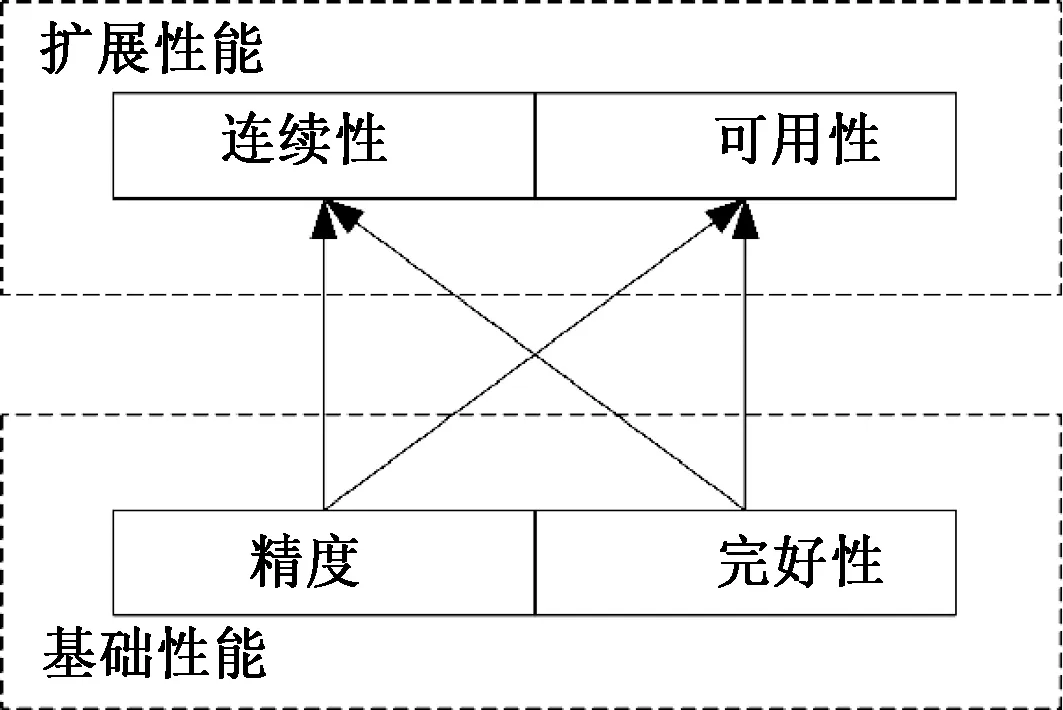
图1 平行递进模型
GNSS及其相关技术的快速发展,在促进其性能指标不断发展的同时,也推动了性能指标评价体系的不断完善。当前,公认的用于评价GNSS的性能指标是由国际民航组织(International Civil Aviation Organization, ICAO)基于各导航系统给出的航空无线电导航必备性能(Required Navigation Performance, RNP),主要包括精度、完好性、连续性和可用性四项指标。四项指标在本质上是紧密联系的,其中任一指标的变化都会影响其他指标的状态。国内外学者很早就已经对四个指标间关系开展了研究,K.Kovach提出了球壳模型和金字塔模型,但两种模型指标间的部分关系缺乏严密推理。文献[5]在两种模型的基础上提出了平行递进模型,分别从不同角度表述了四项指标之间的关系。本文的研究分析基于平行递进模型,见图1。对于不同用户来说,这四项指标的定义也各不相同。从铁路用户角度出发,给出四项指标的定义和计算方法。
1.1.1 精度
精度是指GNSS提供的实时位置与用户真实值之间的重合度,在铁路领域,轨道在地图上的位置都是精确已知的,所以通常采用外符合精度来描述用户在定位过程中的定位误差大小。对于铁路用户来讲,GNSS精度即为水平定位服务精度,其计算方法示意见图2。
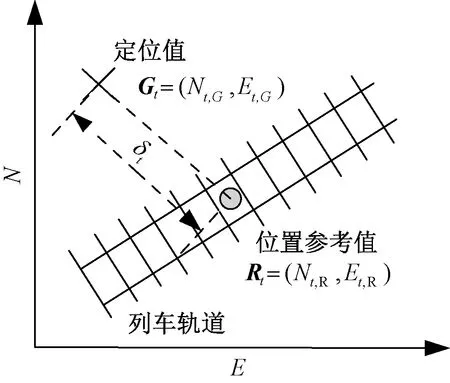
图2 精度计算方法示意
图1中,Gt=(Nt,G,Et,G)为任一时刻接收机给出的定位值,Rt=(Nt,R,Et,R)为该时刻对应的位置参考值。则定位误差可以表示为
( 1 )
将所有定位误差绝对值从小到大排序,取95%分位点处的数值作为精度值。
1.1.2 完好性
用户段的完好性性能主要取决于用户段所采用的自主完好性监测算法RAIM,主要包含两部分内容:一是故障探测识别算法,主要通过观测数据对可能影响定位结果精度的故障卫星进行探测识别,并剔除故障卫星观测值;二是RAIM完好性判定,主要用来判断采用当前完好性监测算法用户所承担的完好性风险是否超限[10]。两部分内容分别对应着两种向用户告警的模式:故障监测告警和定位误差告警。
故障监测告警,是指利用RAIM算法中的卫星故障探测识别算法检测并剔除故障卫星,如果剔除故障卫星后相应的故障检测统计量仍超限,则向用户告警。
实际应用中,通常不会直接计算完好性风险,而是找出一个满足用户完好性风险要求的误差上限,判断其是否大于告警限值AL,若成立,则系统向用户告警。对于铁路用户来说,这个误差上限通常被称为水平用户保护水平HPL,与其对应的告警限值为水平告警限值HAL,HPL的计算方法将在后文详细介绍。算法流程见图3。
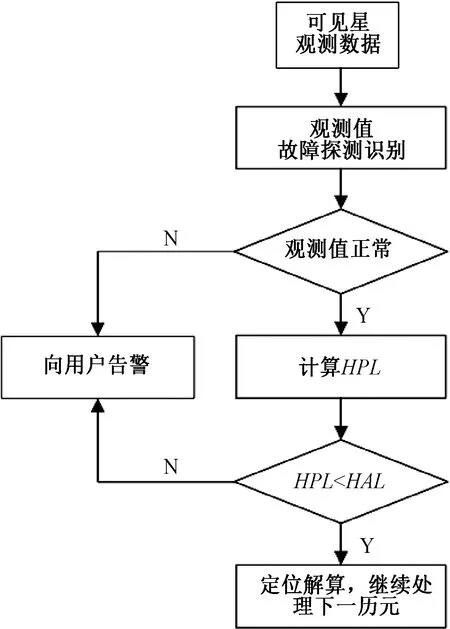
图3 RAIM算法流程
1.1.3 连续性
根据图1中的平行递进模型,GNSS的连续性可定义为系统在测试时间段内连续满足精度连续性和完好性连续性需求的概率,可以通过精度连续性和完好性连续性来计算。
(1)精度连续性
精度连续性指的是系统在测试时间段内连续满足精度需求的概率。通常通过计算发生精度故障的平均间隔时间MTBF得到,具体计算方法为
( 2 )
式中:Tδi为第i次精度故障与第i+1次精度故障之间的时间间隔。根据可靠性基本原理,系统连续性概率服从参数为MTBF的指数分布[5],则系统精度连续性概率可以表示为
Pcon,δ=e-(1/MTBFδ)
( 3 )
(2)完好性连续性
完好性连续性指的是系统在测试时间段内连续满足完好性需求的概率。从用户角度上看,关心的并不是完好性实现的过程,而是最终系统是否可以在定位误差超限时给用户及时的告警。结合上文中完好性风险的定义,本文认为下述两种情况发生时,即为完好性故障:定位误差超限时,系统未告警(漏检);定位误差未超限时,系统发出警告(虚警)。
则发生完好性故障的MTBF可以表示为
( 4 )
式中:TIi为第i次完好性故障与第i+1次完好性故障之间的时间间隔;N为完好性故障的总次数。同精度连续性概率分布相同,系统完好性连续性概率也可以表示为
Pcon,I=e-(1/MTBFI)
( 5 )
假定精度故障事件和完好性故障事件是相互独立的,则连续性故障可以用故障树表示,见图4。

图4 连续性故障树
则系统连续性为
Pcon=Pcon,δ·Pcon,I=e-(1/MTBFδ+1/MTBFI)
( 6 )
1.1.4 可用性
可用性是指系统在观测时间段内满足精度可用性和完好性可用性需求的概率,可以通过精度可用性和完好性可用性来计算。
(1)精度可用性
假设测试时间段为[tstart,tend],用户机采样间隔inc记为T,精度可用性为
( 7 )
式中:δt为t时刻定位误差;Tacc为定位误差限值;bool为布尔函数,系统当前满足括号内给出的判断条件时,函数值取1,否则取0。
(2)完好性可用性
在用户段,系统完好性主要依托RAIM算法实现,所以完好性可用性即用户段采用RAIM算法的可用性。RAIM算法的可用性侧重于告警的有效性:一是保证有足够数量的可见卫星供RAIM计算;二是确保RAIM算法结果的可用性。因此,本文采用FDE可用性、HPL可用性来表征完好性可用性。
①FDE黑洞
本文采用FDE(Fault Detection Exclusion)黑洞[11]计算FDE可用性,当指定高度角下可见卫星不足6颗时,由于可见卫星不足而导致RAIM算法无法进行故障探测识别,这种现象称为FDE黑洞。发生FDE黑洞时,FDE不可用。FDE黑洞的发生概率为
( 8 )
式中:n(t)为当前历元可见星数量,则当前FDE可用性可表示为
( 9 )
②HPL可用性
HPL可以直接用于监测定位精度是否满足用户需求,是判定RAIM可用性的主要方法[10]。基本思想是通过比较HPL与告警限值HAL来确定RAIM的可用性。若HPL≤HAL,则RAIM可用,否则不可用。HPL可用性可以表示为
(10)
系统可用性为
Ava=Avaδ·AvaI,FDE·AvaI,HPL
(11)
假定精度不可用事件和完好性不可用事件是相互独立的,则系统可用性可以用故障树表示,见图5。
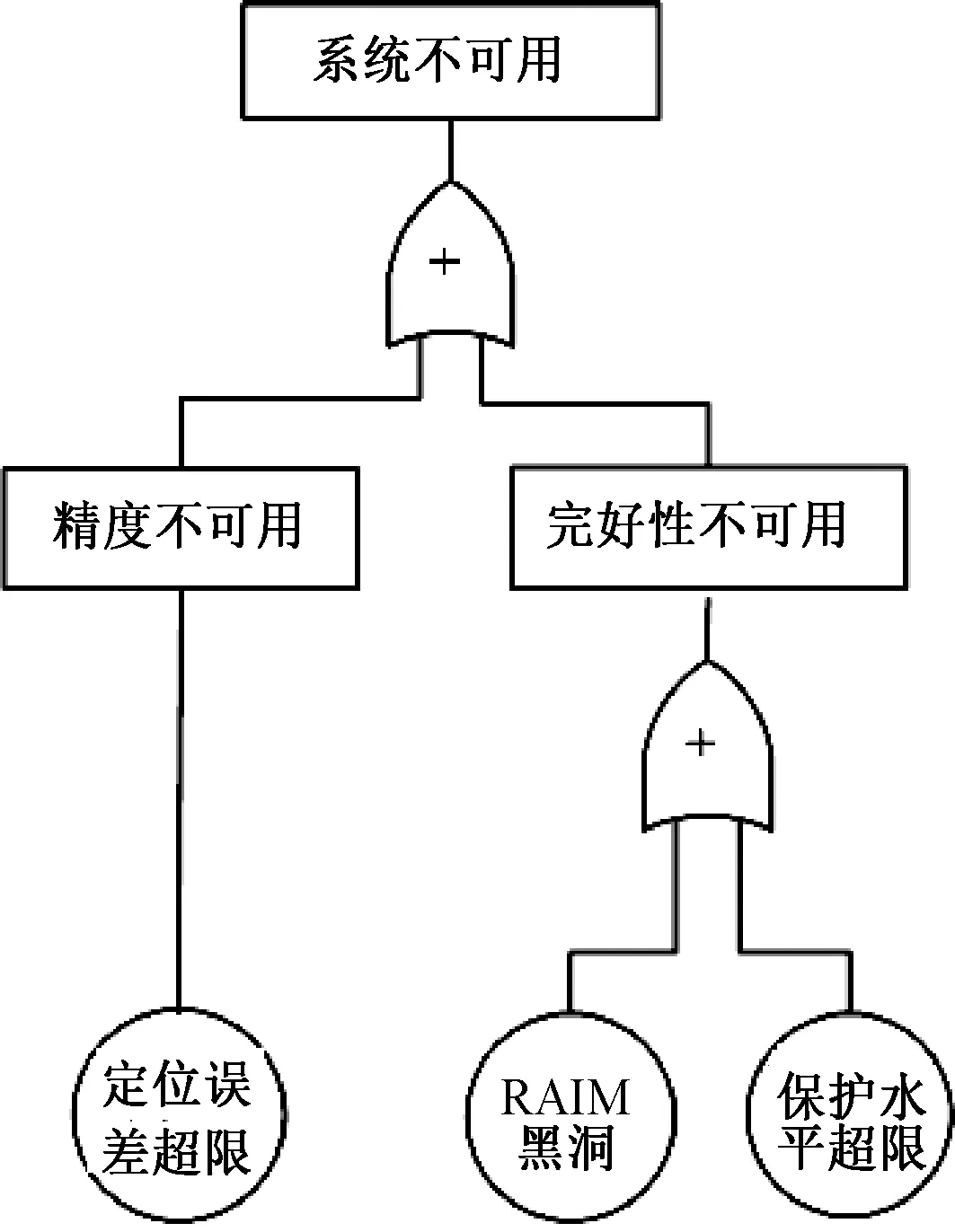
图5 可用性故障树
综上,各项性能和指标可以用APV(Approach with Vertical Guidance)结构表示,见图6。

图6 GNSS性能指标APV结构
1.2 RAMS指标体系
RAMS为轨道交通领域可靠性Reliability、可用性Availability、可维修性Maintainability和安全性Safety首字母的缩写,可以反映列车系统在指定时间内,安全达到轨道交通运输规定水平的置信度。由子系统、组件和部件组成的轨道列车系统,其RAMS可以用可用性和安全性来定性和定量表达[12],而可用性和安全性取决于列车的可靠性、维修性和运用维修状况,RAMS组成之间的关系见图7。

图7 RAMS关系
各项指标定义在国家标准GB/T 21562—2008[12]中已有详细说明。
(1)可靠性
通常用平均故障率进行衡量,其表达式为
(12)
式中:Nf为规定时间内故障总数;∑L为列车累积走行公里。
(2)可用性
(13)
式中:MUT为能工作时间;MDT为不能工作时间。
(3)可维修性
通常用平均修复时间MTTR表示为
(14)
随着列车领域中电子装备不断复杂化,产品运用阶段进行产品检测的需求日益增加[13],测试性在列车设计及运营阶段的重要性日益提升。当前,测试性还被归于可维修性的范畴内,定义为产品能及时、准确地确定其状态并隔离其内部故障的一种设计,定量指标为故障检测率、故障隔离率和故障虚警率。
故障检测率为
(15)
式中:NT为规定时间内发生的全部故障数;ND为检测出的故障数。
故障隔离率
(16)
式中:NL为规定条件下,用规定方法正确隔离到可更换单元的故障数。
故障虚警率为
(17)
式中:NFA为故障虚警次数;NF为真实故障指示次数。
(4)安全性
实际应用中,通常采用安全完整性来衡量产品安全性,为
(18)
式中:Ns为规定时间内的危险故障总数。可以看出,可靠性和安全性指标类似,不同的是安全性中设计的故障为危险性的故障或事故。
各项性能和指标可以用APV(Approach with Vertical Guidance)结构表示,见图8。
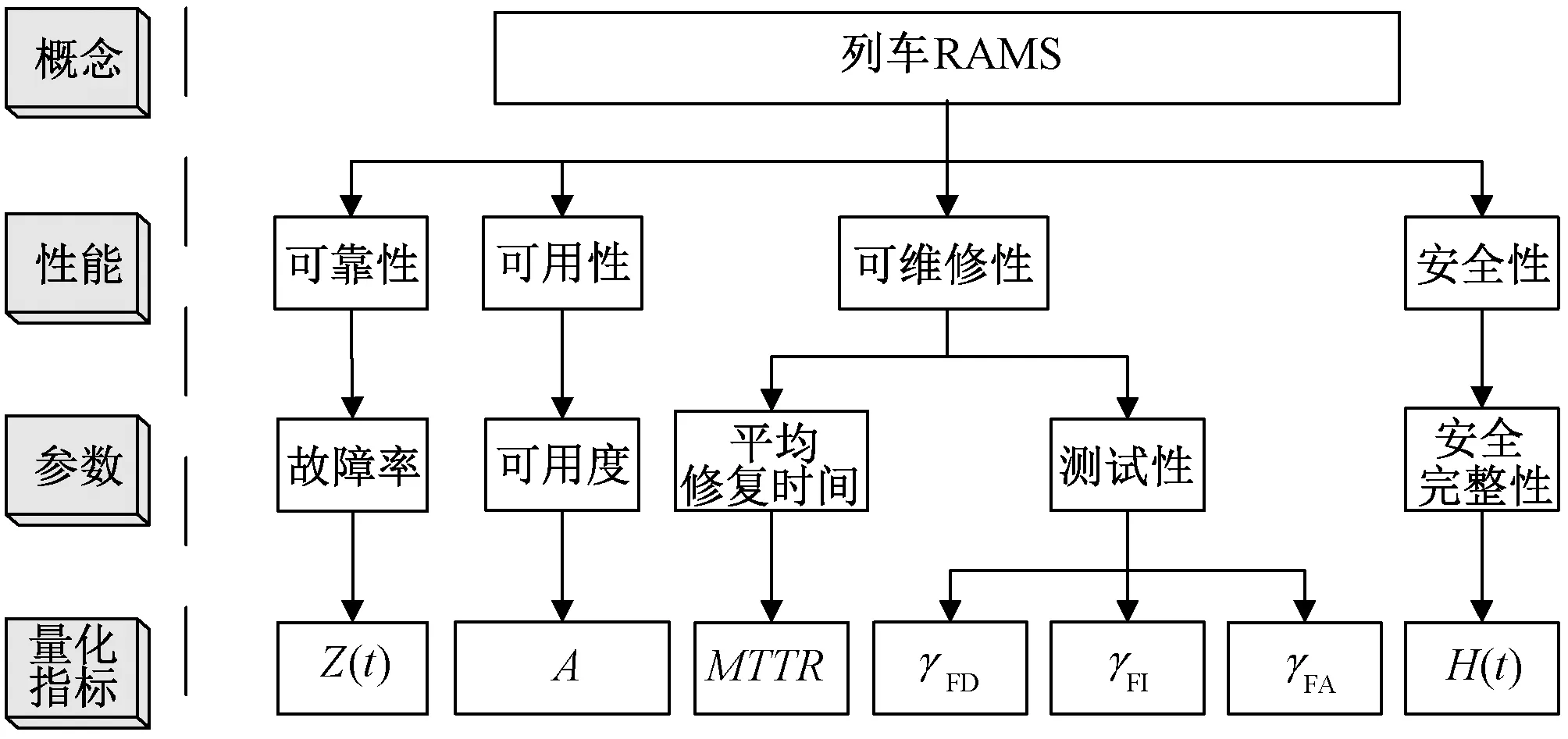
图8 RAMS APV结构示意
2 GNSS性能指标与RAMS指标的映射关系模型
在基于无线通信的下一代列控系统中,GNSS已成为列控系统定位单元的重要组成部分,其RAMS性能是衡量列控系统能否满足应用需求的重要因素。经过分析GNSS指标体系和RAMS,传统GNSS性能指标体系显然不能直接用于衡量GNSS定位单元的RAMS性能。为实现二者之间的完整映射,本文提出一种GNSS性能指标体系与RAMS的映射关系模型,见图9。
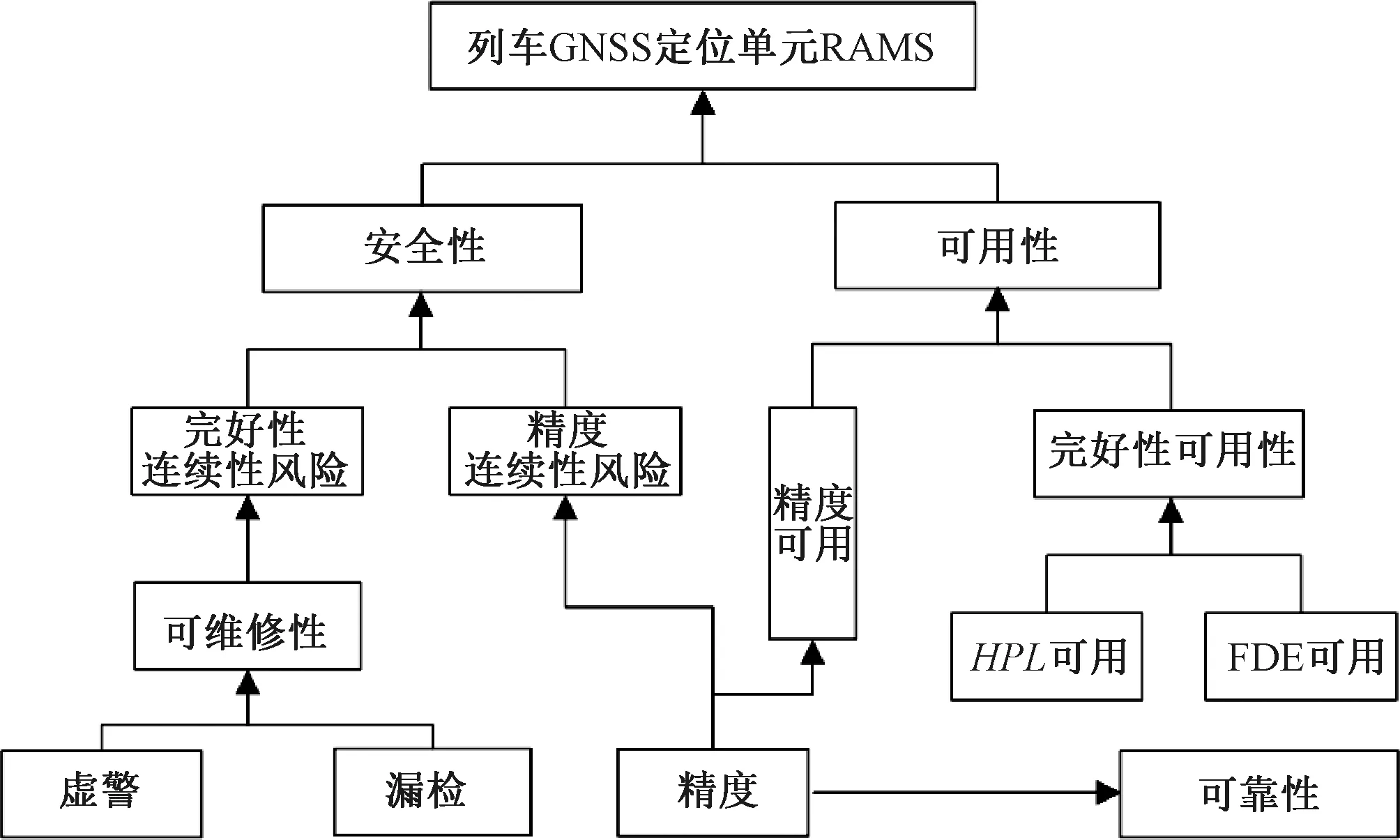
图9 GNSS性能指标与RAMS指标的映射关系
2.1 模型分析
从RAMS角度出发,分析各项指标与GNSS性能指标间的映射关系。
2.1.1 可靠性
列控系统中GNSS定位单元的功能体现在两方面:一是为列车提供位置信息;二是在不能提供可靠位置信息时,发出告警,列控系统便可利用其他辅助定位单元获取可靠位置信息。结合可靠性定义,GNSS定位单元的可靠性为其运用可靠性。GNSS定位单元在当前历元的可靠状态有两种:定位误差小于或等于定位误差限值;定位误差大于定位误差限值,但已向用户及时告警。
在上述两种情况下,认为GNSS定位单元完成了规定功能,未出现可靠性故障。
2.1.2 可维修性
可维修性用于表征产品发生故障后,保持或恢复到规定功能的能力,包含修复性维修和预防性维修。修复性维修为后期产品维护阶段的内容,更多地与维修工具、人员、技术方法等有关,不作为GNSS定位单元实时性能评估的指标。
预防性维修中测试性表征的是产品运用过程中的故障检测能力,属于预防性维修的范畴,因此将评价测试性的故障检测率、故障虚警率和故障隔离率作为GNSS定位单元可维修性的评估指标。本文只考虑一个GNSS定位单元的性能评估,因此不需要考虑故障隔离。此处的故障,即为定位误差超限,对应到GNSS性能指标体系中,则为RAIM完好性判定中的漏检和虚警两种情况。
2.1.3 可用性
在铁路领域中,可用性是可靠性和可维修性的综合表征。可用性表现在两方面:一是产品的可靠性,二是产品发生故障后的修复能力。类比到GNSS定位单元上,其可用性也表现在两方面:一是定位精度的可用性;二是定位精度不可用时,向用户告警的能力可用,即完好性可用,这里的完好性就类比于铁路产品发生故障后的修复能力。因此,可用性可以用精度可用性和完好性可用性定量计算。
2.1.4 安全性
安全性指的是不可能出现导致事故的状态,既要考虑造成安全事故的故障,也要考虑如何消除、控制安全事故的发生[14],受可靠性与可维修性共同影响。对于运行中的列车来说,如果当前定位单元定位精度不够,或是精度不够时没有进行及时告警,则错误的位置信息很可能造成列车发生碰撞、脱轨等危险事故。因此,本文将危险故障分为精度故障和完好性故障两种。
此外,安全性更侧重于规定时间段内实现安全功能的可能性,在规定时间任一时刻发生了危险故障,都会降低其安全性,参照上文GNSS的连续性定义,安全性可以用精度连续性和完好连续性定量计算。
2.2 GNSS定位单元RAMS指标的计算方法
结合2.1节对模型中各项指标的映射关系分析,给出GNSS定位单元RAMS各项指标的具体计算方法。
假定测试时间段为[tstart,tend],用户机采样间隔记为T,观测时段内所有采样点的集合为N={n1,n2,…,nn},其中故障点和正常点可以表示为
(19)
式中:δi为历元i上的定位误差;Tacc为精度限值。定位误差超限点总数表示为NF,正常点数表示为NC,N=NF+NC。
2.2.1 可靠性
GNSS定位单元可靠性包含两种情况,一是定位误差未超限;二是定位误差超限但是正确告警。根据式(12)、式(19)可得
(20)
式中:alarmk为第k个历元上系统向用户告警。
2.2.2 可维修性
可维修性有两个评估指标:故障检测率和故障虚警率。
故障检测率为
(21)
式中:PMD为故障漏检率。
(22)
故障虚警率为
(23)
2.2.3 可用性
GNSS定位单元可用,则精度和完好性同时可用,即
Ava=Avaδ·AvaI,FDE·AvaI,HPL
(24)
式中:Avaδ和AvaI,FDE可利用定位误差结果和可见卫星数直接计算,而计算AvaI,HPL之前需要得到当前历元的HPL。这里给出一种HPL的计算方法。
由于故障探测识别算法同时存在虚警和误判的情况,因此,当完好性风险发生时,也存在观测值有故障和无故障两种情况[10]。此时完好性风险可表示为
PHMI=P{(|δ|>HPL0)|H0}·
P{(r
P{(r (25) 式中:H0表示观测值中无故障;H1表示有故障;r为故障探测识别算法中的检验统计量;THR为探测阈值;P{H0}和P{H1}分别为无故障和有故障两类事件的先验概率,均由完好性风险分配确定。 无故障事件H0中,完好性风险为 PHMI,0=P{(|δ|>HPL0)|H0}· P{(r (26) 可以得到 (27) 式中:P{(r (28) 与无故障事件不同的是,式中P{(r 用户水平户保护水平为 HPL=max{HPL0,HPL1} (29) 由上述计算过程可以看出,HPL是在已知故障探测识别算法中的虚警率和误判率的条件下计算出来的。同时,可维修性与RAIM算法中的故障检测告警、误差超限告警是直接关联的。从这个角度上讲,可以说可维修性对可用性的影响反映在完好性可用性的HPL可用性AvaI,HPL中。 GNSS定位单元的危险故障包括精度故障和完好性故障两种,出现任意一种,则视为此时定位单元不安全,结合精度和完好性连续性计算方法,安全性可以表示为 Ssafety=1-(Pcon,δ+(1-Pcon,δ)Pcon,I)= 1-(e-(1/MTBFδ)+e-(1/MTBFI))+e-(1/MTBFδ+1/MTBFI) (30) 用郑州市城市铁路沿线路段和郊区铁路沿线路段的车载试验模拟真实列车的行驶,对GNSS定位单元进行了RAMS性能评估,验证了模型及算法的可行性。 车载GNSS设备为拓普康NET-G3A,选用IGS的实时超快星历计算GPS动态定位结果,参考位置坐标采用事后GPS PPP定位结果。参考文献[13]中对中密度铁路线路的性能需求,定位误差限值Tacc为10 m,完好性告警限值HAL为20 m。 行驶路线选取郑州市内郑州北站—东双桥火车站的城市铁路沿线和焦作东站—冯庄镇的郊区铁路沿线两段,分别模拟列车在城市遮挡地带和开阔地带的两种行驶情境,两路段动态测试时间均为1 h,城市铁路沿线测试总长度约52.6 km,郊区铁路沿线测试总长度约65.1 km。具体测试路线见图10。 图10 试验路线示意 两种情境下定位误差见图11,测试时段内定位精度分别为6.63 m和3.49 m。图11中标红的点为系统向用户及时告警的历元。经统计,城市路段上定位误差超限历元共有207个,向用户告警的历元为196个;郊区路段上定位误差超限历元共有163个,向用户告警的历元为163个。根据式(20),两种情境下的平均故障率为 图11 定位误差示意 由结果可以看出,城市路段由于存在遮挡,定位精度低于郊区路段,同时因环境较为复杂,导致系统RAIM算法存在不能及时告警的情况,系统可靠性降低。 观测时段内RAIM算法告警情况见图12,其中城市路段发生虚警的历元共12个,郊区路段共5个。根据式(21),两种情境的故障检测率为 根据式(23)得到两种情境下的故障虚警率为 图12 RAIM算法告警情况示意 (1)精度可用性 将两种情境下的定位误差统计结果代入式( 7 ),可得对应的精度可用性为 (2)完好性可用性 两段测试路线上可见卫星数量见图13,城市路段上卫星数量少于6颗的历元共161个,郊区路段共56个。 图13 FDE情况示意 根据式( 9 )可以计算出其对应的FDE可用性分别为 图14 ARAIM算法HPL示意 图14为两种情境下计算得到的HPL,对应图11~图13可以看出,HPL值的大小受可见卫星数影响较大,可见卫星数的增大可以明显减低HPL,主要原因是由于可见星增多可以提供更好的卫星空间几何构型。整个观测时段上,城市路段HPL波动较大,完好性失效历元较多,共722个,郊区路段共391个。根据式(10),对应的HPL可用性分别为 将上述结果分别代入式(24)得到GNSS可用度为 Avacity=Avaδ,city·AvaI,FDE,city·AvaI,HPL,city=0.72 Avatown=Avaδ,town·AvaI,FDE,town·AvaI,HPL,town=0.84 图15为观测时段上完好性故障的历元。结合图11中的定位误差结果,由式( 2 )、式( 4 )计算得到两种情境下精度和完好性平均故障时间分别为 图15 完好性故障示意 对应的安全性分别为 从结果来看,郊区路段遮挡较少,GNSS连续性较好,其安全性较城市路段提高了一个量级。 综上,两种情境下GNSS定位单元的RAMS性能评估结果如表1所示。 表1 RAMS性能评估结果 从表1中数据可得,郊区铁路沿线路段的各项RAMS指标均高于城市路段,主要原因是:郊区路段环境开阔,遮挡较少,环境单一,环境噪声影响较小,使GNSS定位性能优于城市路段。两路段上的安全性均不能达到国标[12]中高要求操作模式下的最低安全等级,后续可以通过辅助增强定位和改进的RAIM算法实现。 本文在分析GNSS性能指标体系和轨道列车RAMS指标体系的基础上,提出一种GNSS性能指标与RAMS指标间的完整映射关系模型,并给出了GNSS定位单元RAMS各项性能指标的计算方法。通过不同情境下的模拟试验,评估了GNSS定位单元的RAMS性能,验证了模型及算法的可行性。数据分析结果显示,在城市复杂环境下,由于遮挡和噪声影响,GNSS定位单元的RAMS性能较差,故障发生较频繁;在郊区开阔环境下,GNSS定位单元的RAMS性能较好。但是两种环境下的安全性尚不能达到高要求操作模式下的最低安全等级。 本文给出的映射关系模型为铁路领域GNSS专用测试平台和评估体系的构建提供了一定的理论参考。下一步将在此关系模型基础上,分析现有列控系统中GNSS定位单元RAMS性能的缺点与不足,研究GNSS最新增强技术的应用方法,为下一代CTCS-4列控系统的研究应用与RAMS行业标准规范制定提供一定的参考。2.2.4 安全性
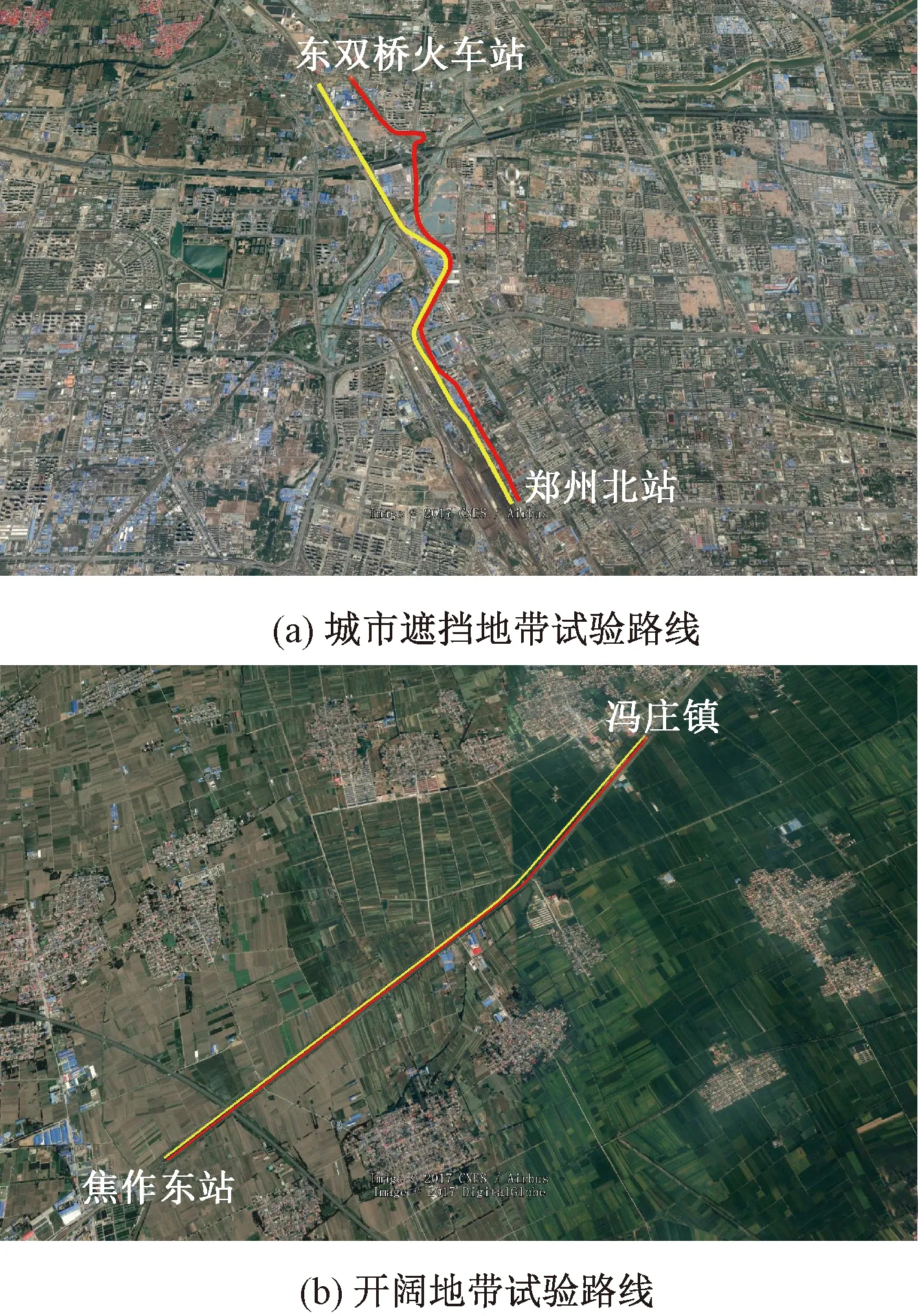
3 RAMS性能评估
3.1 试验方案设计
3.2 评估结果分析3.2.1 可靠性
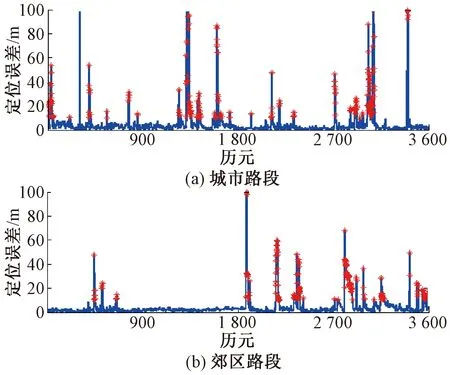
3.2.2 可维修性
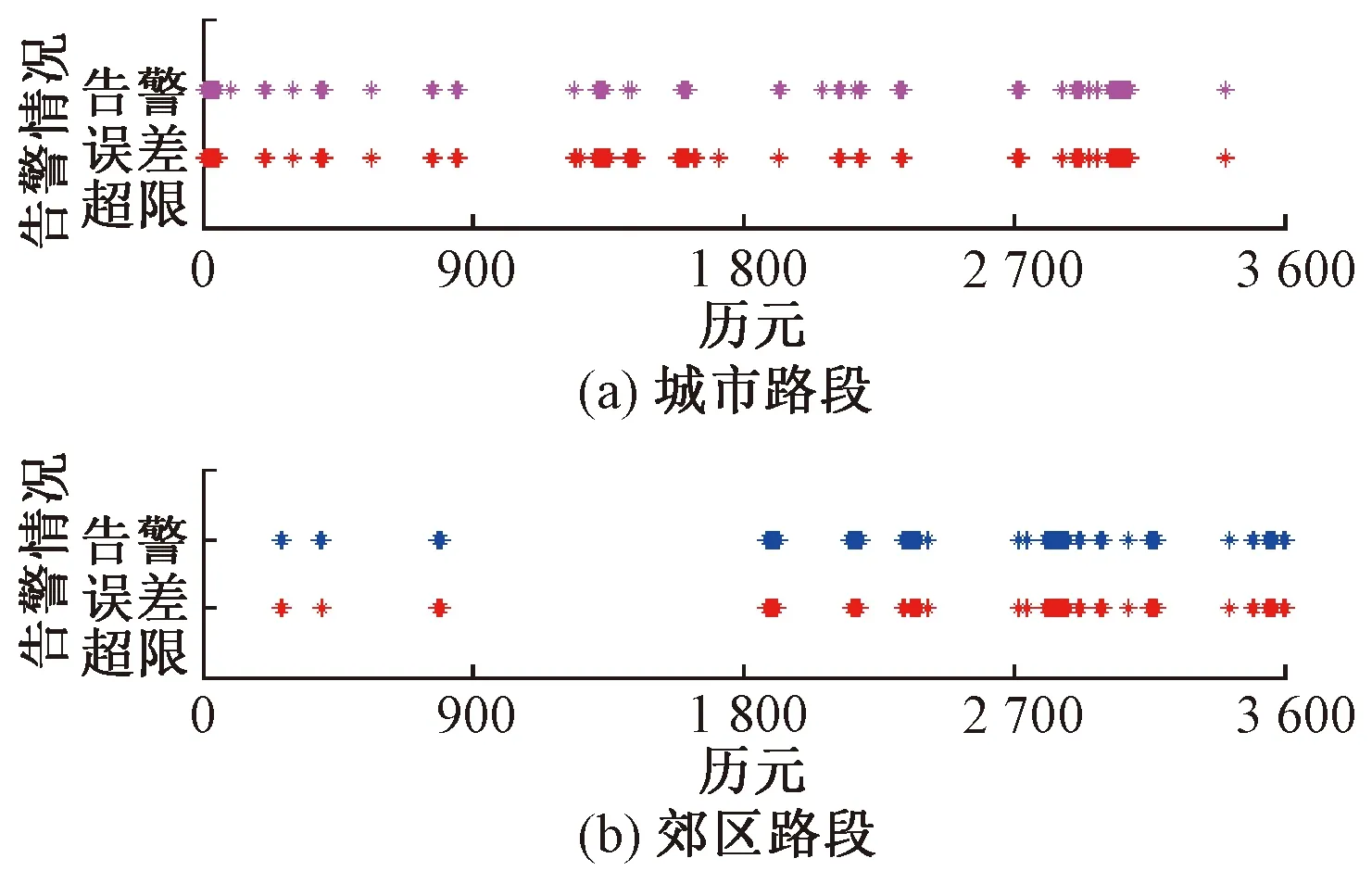
3.2.3 可用性
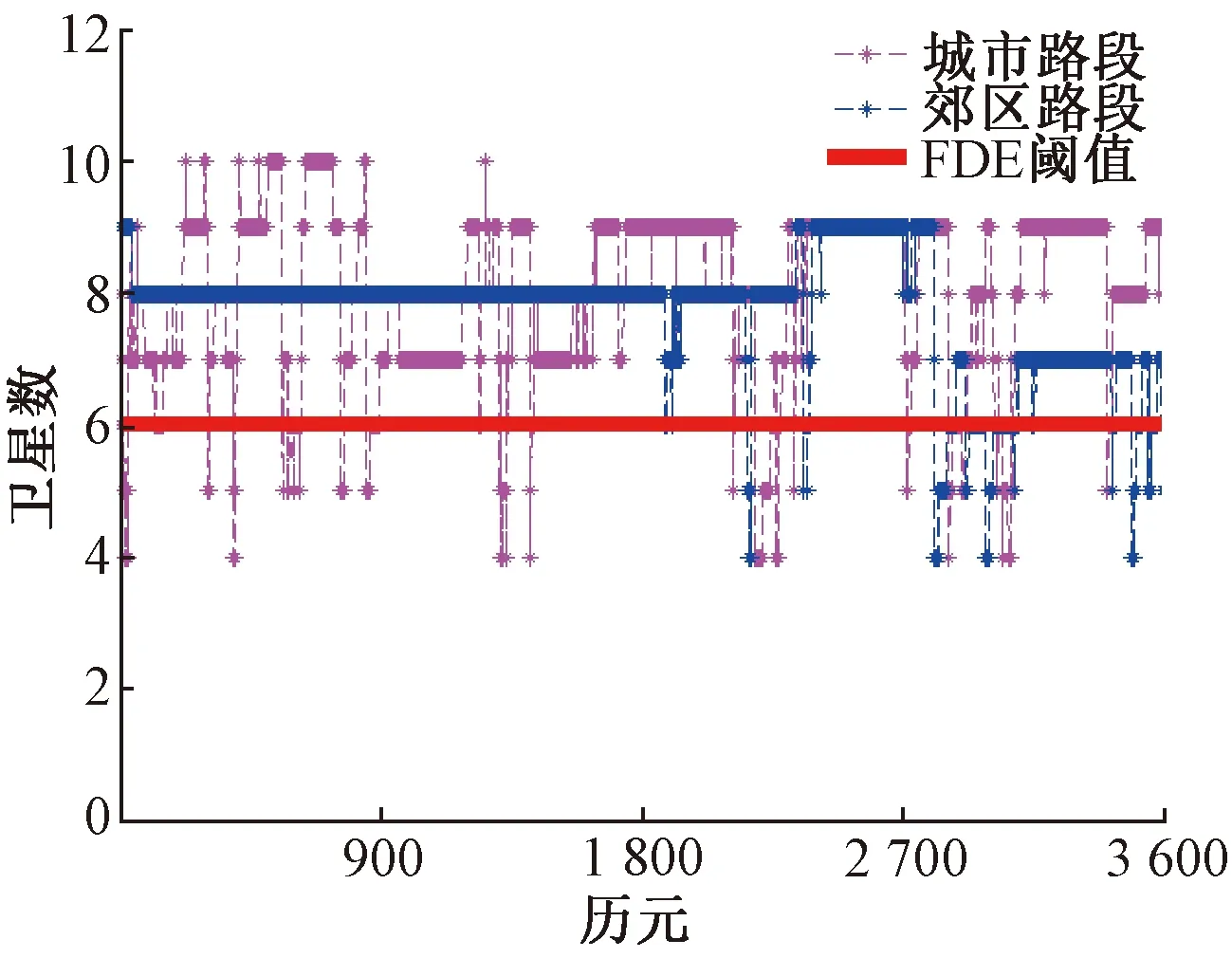

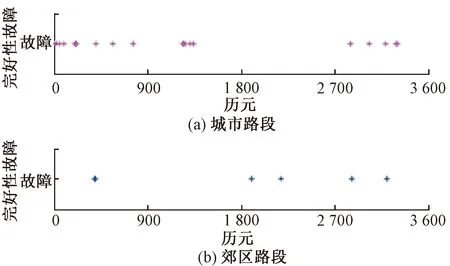
3.2.4 安全性

4 结束语
猜你喜欢
包装工程(2023年24期)2023-12-27 09:18:26海洋信息技术与应用(2021年1期)2021-06-11 01:20:34石油沥青(2021年1期)2021-04-13 01:31:08电子制作(2018年11期)2018-08-04 03:25:38制冷技术(2016年4期)2016-08-21 12:40:30测绘科学与工程(2016年5期)2016-04-17 06:51:15测绘科学与工程(2016年4期)2016-04-17 06:51:14河南科技(2015年7期)2015-03-11 16:23:13电子设计工程(2015年3期)2015-02-27 12:03:45电测与仪表(2014年16期)2014-04-22 05:20:20
