农产品质量溯源RFID标签批量识别
2020-07-10 04:48王祖良郭建新李文臣曹闯乐于洪涛
农业工程学报 2020年10期
王祖良,郭建新,张 婷,李文臣,曹闯乐,于洪涛
农产品质量溯源RFID标签批量识别
王祖良,郭建新,张 婷※,李文臣,曹闯乐,于洪涛
(西京学院信息工程学院,西安 710123)
在农产品质量溯源中采用批量标签识别可极大提高系统效率。然而,基于成本和使用寿命的考虑,目前在溯源系统中使用射频标签通常选择无源标签,标签之间缺乏协作通道,不可避免会发生标签碰撞。该研究设计了基于射频识别技术的农产品追溯系统,针对所设计的追溯系统应用环境,提出一种可自适应动态调整帧长度的动态帧时隙Aloha标签防碰撞方法。只需在第一帧识别后,利用统计得到的首帧成功时隙、空闲时隙和碰撞时隙数对初始标签规模进行估计,并据此优化调整后续帧长度,实现最优识别。仿真结果表明,提出的防碰撞算法应用于所设计的农产品追溯系统,识别效率得到了显著提高,与目前广泛使用的国际标准相比,全局吞吐量性能提高了30%以上。
农产品;溯源;标签;批量识别;防碰撞;全局吞吐量
0 引 言
射频识别(Radio Frequency Identification,RFID)技术由于其具有可非接触读取、标签存储容量大、所存信息可写可读、信息传输安全可靠等优势,已经普遍应用在各种工商业领域当中。特别是作为物联网的关键技术,RFID在农产品追溯与跟踪中得到了广泛应用[1-4],可满足农产品追溯与跟踪管理的需要。Wagne等[5]提出在农产品生产和物流运输全过程通过监测、抽样等方式校验食品标签的数据。相对于传统的条形码,将RFID技术引入农产品追溯系统,具有更加灵活、准确的优势,应用前景更加广阔[6-7]。Bernardi[8]分析了将射频识别技术引入农产品跟踪链的可行性,认为RFID编码空间能够实现供应链全程对所有数据的采集和存储。
在农产品追溯系统中,尤其在运输和仓储过程中,需要对货运车辆入、出库时实现整车货品标签的批量识别。对频繁使用的叉车转运,也需要对整叉车货品批量识别,以实现搬运、装载、库位匹配等自动快速处理。标签批量识别是RFID最明显的优势,但是批量识别会产生标签信号互相干扰,形成标签碰撞,因此,标签防碰撞方法是农产品追溯系统中极为关键的技术。同时农产品包装盒大小不等,形状各异,导致批量识别的规模差异较大,从数十到数千个不等,因此标签防碰撞方法应适应大动态变化范围。
标签防碰撞算法主要分为确定性的二进制搜索算法和采用退避机制的随机Aloha算法2类,其中Aloha算法由于易于实现而得到广泛应用。为了提高Aloha算法的性能,学者们相继提出了时隙Aloha算法、帧时隙Aloha算法和动态帧时隙Aloha(Dynamic Frame Slot Aloha,DFSA)算法。DFSA算法在标签数动态变化范围较大的产品溯源应用环境下具有极大的优越性,近年来受到了广泛的关注[9-12]。例如,Cui等[9]提出了根据标签个数动态调整帧长以获得高识别效率的方法;Kim等[10]提出的一种基于冲突时隙和空闲时隙数调整帧长度的DFSA算法具有较高的评估效率;Barletta等[11]证明了当标签个数与帧长相同时,识别效率最高。EPCglobal C1 Gen2标准采用DFSA算法作为标签防碰撞方法,采用Q算法动态调整帧长,有效地提高了识别效率。这种动态调整帧长的方法特别适用于农产品可追溯系统等动态标签群体规模移动的应用环境,但这种方法没有完全消除空闲时隙,浪费了部分时间资源。为了解决这一问题,研究者们相继提出了许多改进方法[12-19]。Chen等[13]提出了一种基于预约机制的(Reservation Slot with Multi-Bits Aloha, RSMBA)防冲突协议,将标签识别过程分为2个阶段,通过减少碰撞时隙和消除空闲时隙来换取较少的预约开销,从而大大提高了识别效率。Wang等[18-19]提出了一种基于非线性估计的动态帧时隙标签防碰撞方法,和一种基于弦截迭代的自适应动态标签防碰撞方法,与EPCglobal C1 Gen2标准相比标签识别效率得到了明显提高。
本研究设计一个基于RFID的农产品溯源跟踪系统,批量标签识别是溯源系统的关键技术,而批量标签识别不可避免会产生标签碰撞,针对标签防碰撞方法提出一种新的帧长调整方法,本方法利用首帧识别后的成功识别时隙数、空闲时隙数和冲突时隙数估计初始标签数,并在后续识别中自动调整帧长度,使全局吞吐量性能最优。
1 农产品溯源系统设计
1.1 溯源模型
农产品追溯系统包括从种殖侧到消费侧的跟踪,以及从消费侧到种殖侧的追溯2个方面。跟踪是从供应链的上游至下游,跟随一个特定的单元或一批产品运行路径。追溯是从供应链下游至上游识别一个特定的单元或一批产品的来源,通过追溯码的方法回溯某个农产品种植、养殖、生产加工、运输以及分发等各个环节。全信息化的跟踪过程能够确保产品的流向可控可管,遇到有问题的产品能够及时限制其流通或召回。另一方面,跟踪路径所采集到的信息可以在一定时间内得以完整保存,以提供消费者查询所购买农产品每个流通环节的详细信息,以及农产品生长期的农事信息,实现全程可追溯。跟踪和追溯体系流程如图1所示。
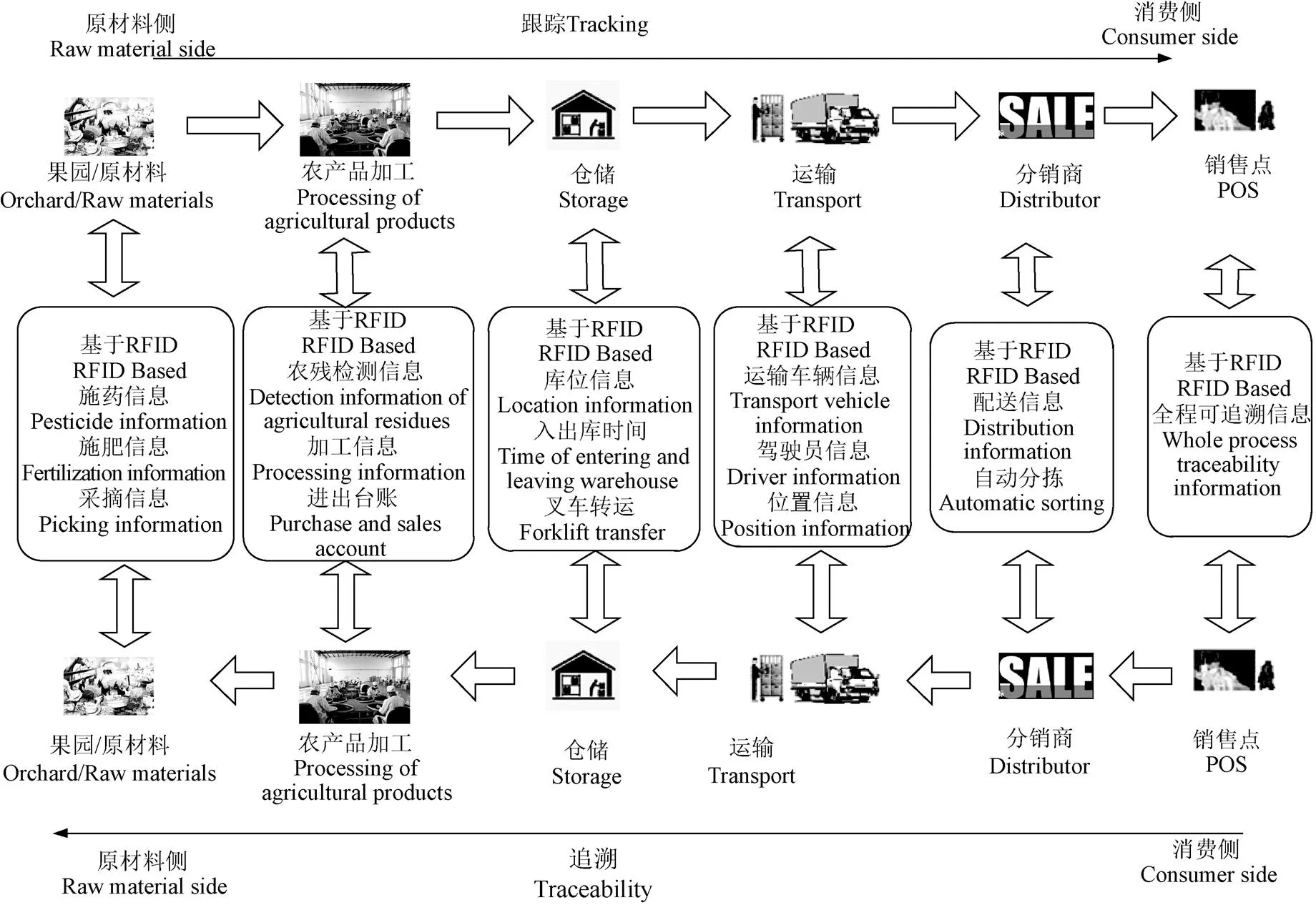
图1 农产品质量跟踪和追溯体系流程图
如图1所示,农产品追溯系统包括以下处理环节:
1)农产品种植环节信息处理,即农产品追溯系统的起点,利用RFID技术将每一地块的施药、施肥等农事信息,以及采摘信息等与地块信息进行绑定,并将农事人员信息、农事计划代码等强制植入RFID存储器,为下游进一步完善信息和信息查询提供原始数据。采摘时只需要利用阅读器对地块标签进行扫描即可获取本地块所有种植品种和种植环节的所有信息。
2)加工环节信息处理,在加工好的包装盒上粘贴RFID标签,将种植环节信息导入标签,在此基础上更新增加本环节信息,包括农药检测信息、加工信息、出入库批次信息等。
3)仓储环节信息处理,仓储环节利用加工环节所含信息进行批次管理、入出库时间及叉车转运管理,在加工环节采集信息基础上添加分装人员信息、分装流水线号等信息。该环节充分利用RFID技术批量识别优势实现运输车辆和转运叉车的整车批量信息获取,大幅提高仓储管理效率,提高仓库利用率。
4)运输环节信息处理,增加车辆信息和驾驶员信息,并利用GPS定位、远程传输信道实现货品批次的远程位置实时查询。
5)分发和派送环节信息处理,增加配送信息,提供自动分拣功能。
6)终端消费环节信息处理,在前面各环节基础上,终端消费环节增加查询访问功能,给消费者提供全程追溯功能,保障消费者的知情权。
7)网络体系结构采用典型的3层物联网结构,实现种植、收购、加工、流通、销售等各个环节的个性化信息定制,适应各种复杂的生产流程、信息采集、处理和查询、统计。信息采集系统用于整个追溯链底层信息的采集、基础数据管理,包括字典维护管理、信息采集、数据上传等。数据汇总系统用于接收企业数据、汇总,数据管理、查询分析,产生追溯链、数据打包上传等。
1.2 仓储环节处理流程
仓储环节处理流程如2所示。对于鲜活农产品,通常对仓储环境要求较高,应该减少果蔬等在仓库的存放时间。对于需要入库保存的农产品,在货运车辆入库时通过入口处固定的阅读器读取车内所有商品信息,包装规格、包装质量等自动获取并传输至远端云处理平台,由云处理平台处理后根据仓库特点形成库存信息,并输出入货位等信息,实现货品与库位的最优配置。基于RFID技术,从农产品入库到分拣、叉车转运、入库位、出库位、装载以及整车出库,每个环节实现自动化处理,实现智能感知、定位和识别。
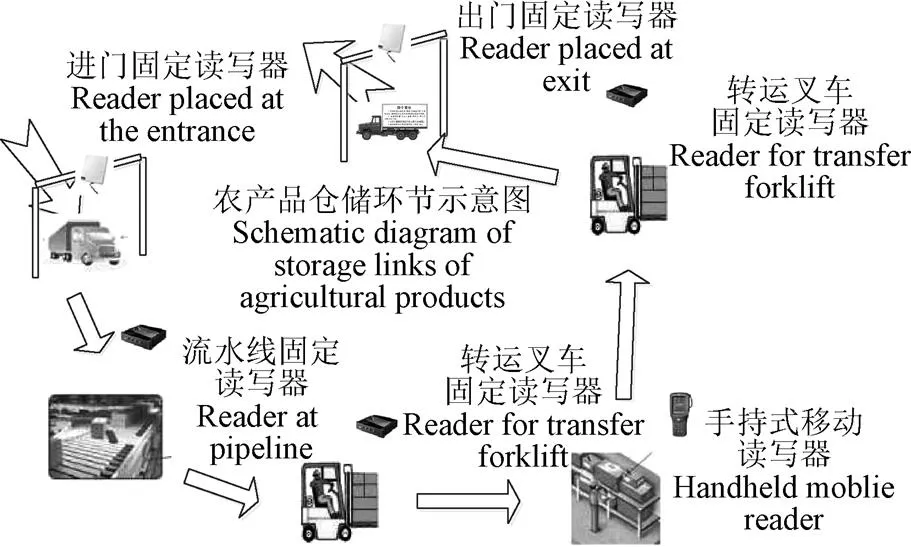
图2 仓储环节处理流程图
从上述农产品追溯系统模型可知,在仓储环节、运输环节、配送分发等环节都需要采用RFID批量识别,尤其在仓储环节的车辆入出门、货品流水线分拣、叉车转运、库存盘点等多个具体环节,标签批量识别性能对追溯系统的处理效率起着重要的作用。
2 批量标签识别信息获取方法
在上述溯源模型的中间环节,尤其仓储环节需要对大量标签进行批量识别。批量标签识别在同一时刻会有多个标签向阅读器发送信息,无线电波会发生碰撞,导致识别失败,需要采取标签防碰撞方法实现批量标签识别。Aloha算法是被广泛使用的标签防碰撞方法。Aloha算法是一种信号随机接入的方法,其采用电子标签控制方式,即电子标签一旦进入阅读器的作用范围内,就会自动向阅读器发送自身的序列号并与阅读器开始产生通信,如果在一个电子标签发送数据的过程中,其他的电子标签也在发送数据, 那么发送的信号就会重叠引起碰撞作用,当阅读器检测到碰撞产生就会发送命令,让其中一个电子标签暂停发送数据, 随机等待一段时间以后再重新发送数据。由于每个数据帧的发送时间只是重复发送时间的一小部分,以致在2个数据帧之间产生相当长的间歇,因此,会存在着一定的概率使2个标签的数据帧不产生碰撞,但正是因为时间间歇问题的存在,使得80%以上的数据通路没有被利用。该方法实现防碰撞的效率代价较高,然而因为Aloha 算法实现简单,并且适于标签数量不定的场合,所以目前广泛用于电子标签系统的防碰撞方法中。为了提高Aloha 算法的吞吐效率,针对Aloha 算法形成了许多变型算法,包括时隙Aloha算法,帧时隙Aloha算法和动态帧时隙Aloha算法等,其变型原理均是通过调整传送信息帧长、时隙等参数。其中动态帧时隙Aloha算法在每帧识别结束后根据剩余标签数动态调整帧长度,以匹配剩余标签数实现最优识别。Q算法是一种典型的动态帧时隙Aloha算法,调整策略较为简单,已在国际标准中推广使用。剩余标签数的估计是动态帧时隙Aloha算法实现最优识别的前提,本研究提出一种基于首帧识别标签数估计初始标签的动态帧时隙Aloha算法。
2.1 Q算法
从上面建立的农产品追溯系统模型可以看出,在储运调度环节,尤其是在车辆进出的许多具体环节、流水线中货物的分类、叉车的运输和库存等方面,需要采用批量标签识别。因此,需要对标签防碰撞方法进行深入的研究,并根据具体的应用环境提出有效的防碰撞算法。目前射频识别技术领域广泛应用的EPCglobal_C1 G2标准采用Q算法动态调整帧长度[20-23]。Q算法动态调整帧长,有效提高了识别效率。调整参数的示意图如图3所示。
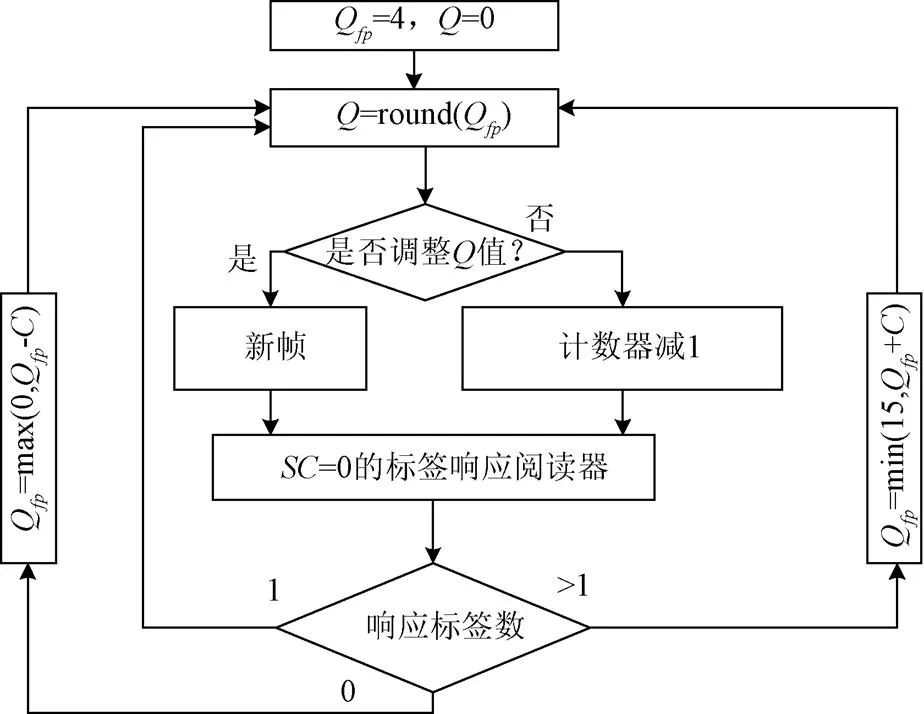
注:Q为随机数,用以确定帧长度,Q[0,(2Q-1)];C为可调步长,;Qfp为浮点数,初值为4,根据响应标签数调整Qfp值,若响应标签数=0,Qfp=(Qfp-C),若响应标签数>1,Qfp=Qfp+C,若响应标签数=1,Qfp值不变;Qfp=min(15,Qfp+C)表示如果(Qfp+C)<15,则Qfp =(Qfp+C),否则Qfp=15;Qfp=max(0,Qfp-C)表示如果(Qfp-C)>0,则Qfp =(Qfp-C),否则Qfp=0; SC为时隙计数器。
EPCglobal_C1 G2标准采用不等长的帧,与固定帧长的方法相比,有效地提高了识别效率[24]。此外,该算法根据识别时隙、空闲时隙和冲突时隙的数量来确定是否结束当前帧,进一步提高了识别效率。
2.2 基于首帧估计标签数的DFSA算法(DENFF)
如前所述,Q算法由于采用动态调整帧长度,大幅提高了识别效率,被广泛采用。但是,Q算法中调整步长在标准里只给出了取值范围为0.1~0.5,并没有给出取值的规则,实际应用中如果值过高会频繁调整帧长度,导致系统不稳定。反之,如果值过低,则会导致调整迟滞无法跟踪剩余标签数的变化,降低系统识别效率。本研究提出一种基于首帧识别标签数估计初始标签的动态帧时隙Aloha算法,称为基于在第一帧后进行标签数估计的DFSA算法(DFSA Algorithm based on Estimation Number of Tags in First Frame,DENFF)算法,该算法基于首帧识别标签数估计初始标签,进而动态调整后续帧长度。仅在第一帧结束后估计一次初始标签数目,此后利用每帧待识别标签数减去本帧成功识别标签的结果作为下一帧的帧长度,实现最优识别,标签数估计方法采用Vogt算法[25]。处理流程如图4所示。
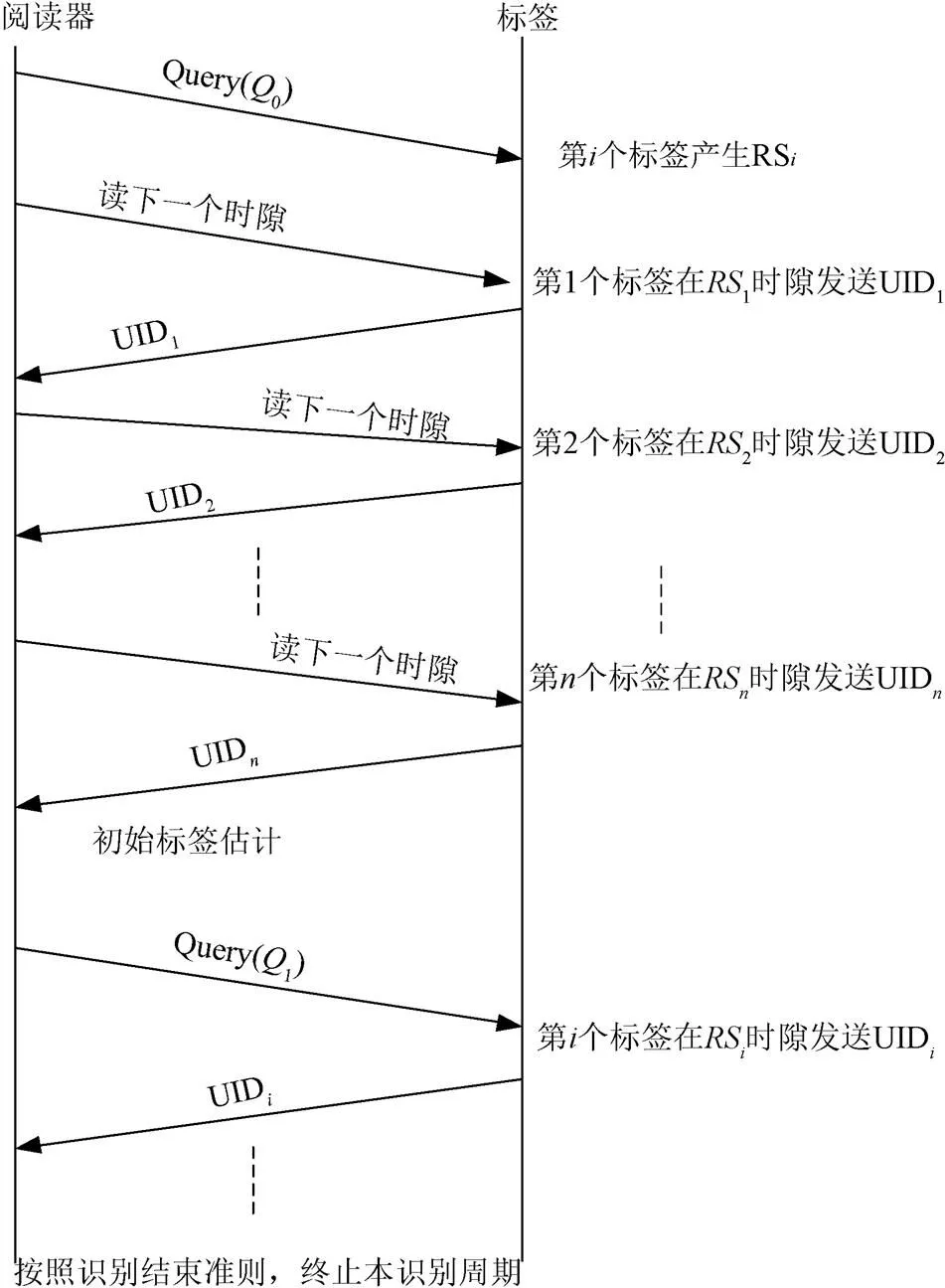
注:Query(Q0)为开启一个识别周期的命令,Q0表示第1帧所含时隙数;UIDi是第i个标签的用户标识号(i=1,2,…,n),n为初始标签数;RSi表示第i个标签产生的随机数。
假设阅读器覆盖范围内的标签数为,将个标签全部识别一次的过程定义为一个识别周期,每个识别周期由若干个识别帧组成,在一个识别帧里,每个标签只响应一次阅读器轮询命令ReadNext,每帧由若干时隙组成,每帧所含时隙个数定义为帧长度,所有标签的应答均在时隙的起始时刻开始。
处理流程由Query(0)命令启动识别周期的第一帧识别,0参数为初始参数,收到Query(0)命令后,第个标签产生一个≤0的随机自然数RS作为期望响应阅读器的时隙号,并在阅读器发送第RS次ReadNext命令后响应阅读器回传其用户识别号UID。
阅读器利用曼彻斯特编码识别标签信号碰撞情况,如果第时隙只有一个标签响应,则成功识别标签,该时隙记为成功时隙S,成功时隙计数器N增加1;如果多于一个标签响应,则发生信号碰撞,该时隙记为碰撞时隙S,碰撞时隙计数器N增加1;如果没有标签响应,则该时隙记为空时隙S,空时隙计数器N增加1。


因此,在一帧内成功时隙数的期望值如式(3)所示。


同理,空闲时隙的期望值如式(5)所示。

因为一个时隙只有成功、空闲和碰撞3种情况,所以容易求得碰撞时隙概率如式(6)所示。

碰撞时隙期望值如式(7)所示。

利用Vogt算法可得初始标签数的估计如式(8)所示[25]。
2.3 识别终止准则
标签读取率,即在一个识别周期内对待识别标签的读取概率,是衡量批量标签识别的重要指标。在物理层,由于复杂电磁环境的干扰、天线极化等不确定性,有可能存在接收电磁波能量达不到激活门限的标签,导致标签漏读。本研究主要研究标签防碰撞协议,假定在所有标签物理层均能被激活的条件下考察标签防碰撞性能。在所有标签均能激活的前提下要求防碰撞算法无遗漏地识别所有待识别标签,即读取率为100%。为此,准确判断待识别标签是否为0是终止识别过程的重要依据。在实际应用中待识别标签数对于阅读器是未知的,无法直接判断剩余标签是否真正为0。EPC_global C1 G2标准通过判断标签的响应来决定是否结束识别周期,如果发送给定参数的Qurey()命令,没有标签响应,即既没有碰撞时隙发生,也没有有效标签被识别,则认为待识别标签数为0,结束本识别周期。本研究提出的DENFF算法只在第一帧识别结束后估计一次初始标签,后续帧长度均是根据第一次估计的标签数减去当前帧之前成功识别的标签数,作为当前帧的帧长度。这样,第一帧估计误差会一直传递到最后一帧。当剩余标签数较少,比如少于10的情况,那么当初始标签为数千个时,第一次估计误差有可能大于数十个,误差>剩余标签数,则会出现估计剩余标签数为0,实际剩余标签数不为0的现象,出现误判。为了避免这种情况,提出以下帧长倍增算法进行改进。
假设Rep为一自然数,作为循环判断次数上限,识别终止判断算法如下:
1)Q=Q-1−N-1;N-1为第1帧成功识别标签数;
2)如果Q=0并且循环次数
3)开启新的识别帧;
4)结束识别周期。
3 结果与分析
为了客观评价本研究提出的DENFF算法性能,选取Vogt算法和Q算法作为比较。Vogt算法提出了基于切比谢夫不等式并最小化帧内实际和理论计算的空时隙数、成功时隙数和碰撞时隙数差来估计标签数,得到帧内标签数等于成功识别时隙数加上2倍碰撞时隙数的结论,针对最小化识别延迟,还提出了不同时隙数的帧对应标签数范围[25],该算法计算简单,并具有较好的性能,得到了广泛的关注[28]。Q算法被EPCglobal_C1G2标准和ISO18000-6标准采纳作为超高频标签防碰撞方法推荐使用的DFSA帧长调整算法,并已在世界范围内广泛使用[24]。
全局吞吐量性能是衡量RFID批量识别性能的重要指标,全局吞吐量定义为在整个识别周期内完成阅读器覆盖范围内全部标签识别,传输有用信息所占用的时间与识别周期所消耗的总时间之比。采用Monte Carlo方法,对采用本节介绍的标签数估计DENFF算法、Vogt算法及Q算法的标签估计算法的全局吞吐量性能进行仿真和比较。Monte Carlo方法过程如下:

在DENFF算法里0值为首帧帧长度的值,而Q算法中变量值为帧长度的以2为底数的对数值,为了保持参数一致性以便于对比,DENFF算法中0设为1 024,而Q算法中变量值设为10(即对应值为1 024)。
根据图2所示的农产品追溯系统仓储环节,需要对入出库区的货运车辆和转运叉车进行整车批量识别。以某茶叶质量追溯为例,采用常用的转运叉车,叉车一次能够承运5个茶叶运输大箱,1个大箱装6个批发小箱,1小箱装6个最小销售单元的茶叶礼盒,每个礼盒内壁贴有RFID标签作为一个识别单元,则对一个转运叉车的整车批量识别标签数为180。以西湖龙井茶某规格礼品包装盒为32 cm×21 cm×8 cm为例,每盒体积为5 376 cm3。以常见的2.5 t箱式货运车辆为例,以容积为12 m3计算,每辆可以装载12×106/5 376=2 232个礼品盒。因此防碰撞算法需能够适应从180到2 232个标签规模的批量识别,试验参数:标签数从100到2 500变化,步长为20。标签为超高频电子标签,符合EPCglobal_C1 G2标准,天线为全向天线,极化方式为圆极化,其激活能量门限固定。此外,茶叶为干货,含水分极少,不含有金属成分,因此仿真中忽略茶叶及包装盒对电磁波的额外衰减。在以上假设条件下,仿真试验中茶叶摆放位置和方向对识别性能的影响可以忽略。电子标签存储器分为4个存储区,分别是电子产品编码(Electronic Product Code,EPC)区:存EPC号的区域,系统中读写器规定最大能存放8字,可读可写;标签识别号(Tag IDentifier,TID)区:TID 区储存由标签生产厂商设定的标签识别ID号,目前有4字和8字2种ID号,可读但不可写;用户区(User):读写器能存放32字,可读可写;保留区(Reserved区):前2个字是销毁(kill)密码,后2个字是访问(access)密码,可读可写。仿真结果如图5所示。
由图5可知,与Q算法相比,DENFF算法全局吞吐量得到了明显提高,大约提高了30%以上。Vogt算法的性能介于Q算法和DENFF算法之间。
如前所述,待识别标签数对于阅读器而言是未知的,因此无法设定最优的0值开启第一帧识别。将0作为控制参数,分别取0=400、1 000、1 500进行仿真,全局吞吐量如图6所示。其中,当0=400时,在=400附近吞吐量波动较大;当0=1 000时,在=1 000附近吞吐量波动较大;当0=1 500时,在=1 500附近吞吐量波动较大。即是说在初始值与待识别标签数相等时吞吐量波动较大,初始值远离待识别标签数时吞吐量性能较为平稳。但影响不太明显,全局吞吐量均在20%~32%之间。这是由于本研究提出的算法在第1帧识别后对初始标签数进行估计,0的取值只影响第1帧的识别效率,从第2帧开始即动态调整帧长度实现全局吞吐量最优化识别。因此实际应用中0值的设定只要根据实际经验判断,大致设为与待识别标签数在一个量级上即可,这也为实际应用提供了方便。
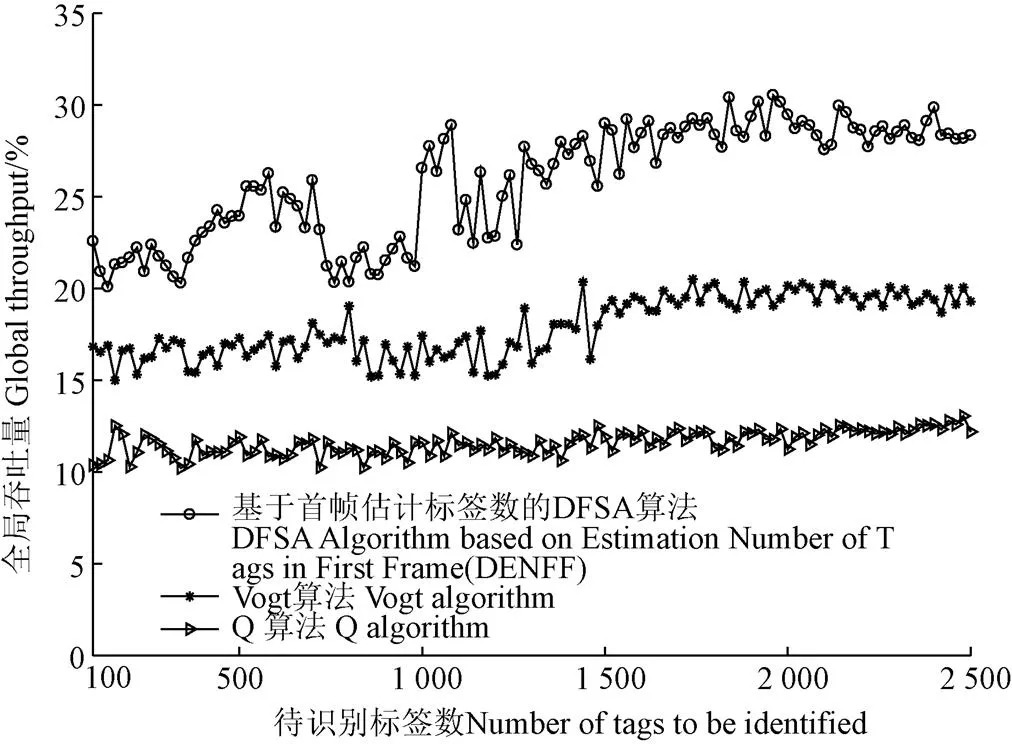
图5 全局吞吐量性能仿真结果
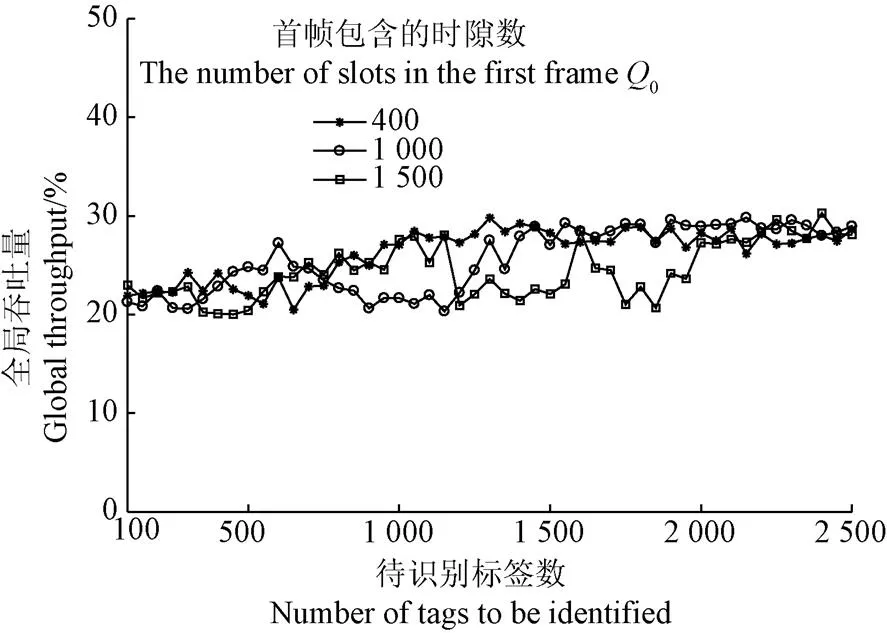
图6 Q0作为控制参数的DENFF性能仿真结果
分别将DENFF算法、Vogt算法和Q算法作为EPCglobal_C1 G2标准的标签防碰撞方法用于本研究设计的农产品追溯模型,通过仿真比较各种算法批量识别的延迟性能。假设每个标签仅传输64位UID信息,物理层通信速率为标准规定的最低速率26.7 kB/s,则时间延迟如式(9)所示。
由图7可知,DENFF的延迟最小,Vogt的延迟次之,Q算法的延迟最大。而且值越大DENFF的延迟性能相对其他2种情况优越性越明显,因此适合于大规模标签数的情况。综合图5和图7可知,当=180时,如果采用DENFF算法,则全局吞吐量为22%,完整识别完一辆叉车货物标签所需时间约为2 s;如果采用Vogt算法,则全局吞吐量为15%,全部识别完整叉车标签所需时间约为3 s;如果采用Q算法,则全局吞吐量为11%,全部识别完整叉车标签所需时间约为3.9 s。在实际叉车转运中,叉车转运一次所用时间以分钟计算,扫描时间<5 s在叉车转运所需时间中占比非常小,因此3种防碰撞方法均能满足要求。当=2 232时,由图7可知,完整识别完1卡车货物标签的时间延迟,DENFF算法约需18 s,Vogt算法约需27 s,Q算法约需44 s,可见对于大规模标签识别,本研究所提算法明显优于对比的2种方法,尤其对相较于Q算法能节省大量等待时间。
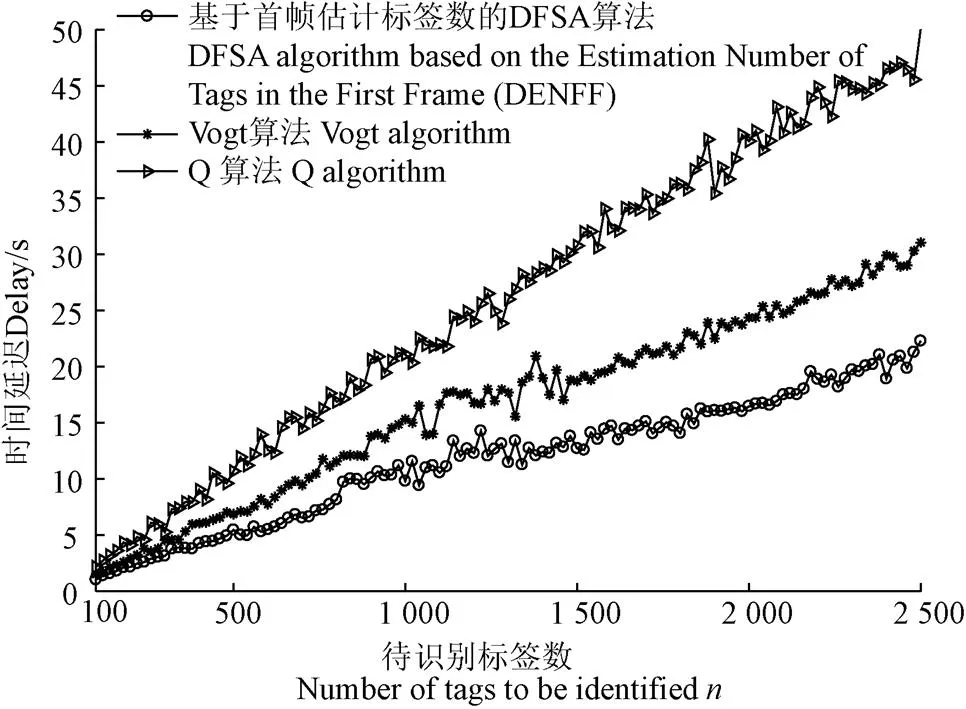
图7 时延性能仿真结果
4 结 论
农产品追溯系统不仅为消费者提供产品追溯以满足其知情权,还可为问题产品的跟踪控制提供信息手段。与传统的条形码和二维码相比,射频识别(Radio Frequency Identification,RFID)技术具有非接触和批量识别的优点,基于RFID的农产品追溯系统是必然的发展趋势。本研究的重要贡献在于针对农产品溯源应用环境,提出了一种新的帧长度调整方法。在第一帧识别后估计初始标签数,根据初始标签数优化后续帧的长度,得到最优的识别,与目前广泛使用的Q算法相比,全局吞吐量提高了30%以上。仿真试验表明本研究提出的基于在第一帧后进行标签数估计的DFSA算法(DFSA Algorithm based on Estimation Number of Tags in First Frame,DENFF)算法对初始标签数的适应范围较广,当初始标签数在100~2 500之间变化时,首帧时隙数0分别取400、1 000和1 500时全局吞吐量均在20%~32%之间,因此0对识别效率影响并不明显,这是由于所提算法只在第1帧结束后进行1次初始标签估计,之后每1帧识别均设置为最优帧长的,因此全局吞吐量性能不受明显影响。以茶叶的仓储为例进行的仿真试验表明标签批量识别时间延迟能满足叉车的转运和出入库要求。
[1]赵训铭,刘建华. 射频识别(RFID)技术在食品溯源中的应用研究进展[J].食品与机械,2019,35(2):212-216.
Zhao Xunming, Liu Jianhua. Research progress of application of Radio Frequency Identification (RFID) technology in food traceability[[J]. Food & machinery, 2019, 35(2): 212-216. (in Chinese with English abstract)
[2]王宁,尤美虹. 果品溯源现状及RFID溯源系统探析[J].物流工程与管理,2019,41(10):93-95.
Wang Ning, You Meihong. The status of fruit traction and analysis of RFID tracing system[J]. Logistics Engineering and Management, 2019, 41(10): 93-95. (in Chinese with English abstract)
[3]庞超,何东健,李长悦,等. 基于RFID与WSN的奶牛养殖溯源信息采集与传输方法[J]. 农业工程学报,2011,27(9):147-152.
Pang Chao, He Dongjian, Li Changyue, et al. Method of traceability information acquisition and transmission for dairy cattle based on integrating of RFID and WSN[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(9): 147-152. (in Chinese with English abstract)
[4]Penttilä K, Engels D, Kivikoski M A. Radio frequency identification in supply chain management[J]. International Journal of Robotics and Automation, 2004, 19(3): 143-151.
[5]Wagner G L, Glassheim E. Traceability of agricultural products[J]. Film Watch Division Marketing Plan. 2003(5): 1-17.
[6]Sahin E, Dallery Y, Gershwin S. Performance evaluation of a traceability system[C]// 2002 Proceedings of IEEE International Conference on Systems, Man and Cybernetics, Yasmine Hammamet, 2002: 210-218.
[7]Regattieri A, Gamberi M, Manzini R. Traceability of food products: General framework and experimental evidence[J]. Journal of Food Engineering, 2007, 81(2): 347-356.
[8]Bernardi P. An anti-counterfeit mechanism for the application layer in low-cost RFID devices[C]// 3rdIEEE International Conference on Circuits and Systems for Communications, Nice, France, 2006: 207-211.
[9]Cui Yinghua, Wang Huiyang. A new anti-collision method for RFID systems[C]//12thIEEE International Symposium on Computational Intelligence and Informatics, Budapest, Hungary, 2011: 51-55.
[10]Kim S C, Kim S K. An enhanced anti-collision algorithm for EPC gen2 RFID system[C]//5thFTRA International Conference Multimedia and Ubiquitious Engineering, Crete, Greece, 2011: 293-296.
[11]Barletta L, Borgonovo F, Cesana M. A formal proof of the optimal frame setting for dynamic-frame Aloha with known population size[J]. IEEE Transactions on Information Theory. 2014, 60(11): 7221-7230.
[12]Zhu Lei, Yum T S P. The optimal reading strategy for EPC Gen-2 RFID anti-collision system[J]. IEEE Transactions on Communications, 2010, 58(9): 2725-2733.
[13]Chen Yihong, Feng Quanyuan, Zheng Ma, et al. Multiple-bits-slot reservation Aloha protocol for tag identification[J]. IEEE Transactions on Consumer Electronics, 2013, 59(1): 93-100.
[14]Zhang Xiaohong, Hu Yingmeng. Research on a grouped adaptive allocating slot anti-collision algorithm in RFID system[J]. Acta Electronica Sinica, 2016, 45(6): 1328-1335.
[15]Barletta L, Borgonovo F, Cesana M. A formal proof of the optimal frame setting for dynamic-frame Aloha with known population size[J]. IEEE Transactions on Information Theory, 2012, 60(11): 7221-7230.
[16]Chen W T. A feasible and easy-to-implement anti-collision algorithm for the EPC global UHF Class-1 Generation-2 RFID protocol[J]. IEEE Transactions on Automation Science and Engineering, 2014, 11(2): 485-491.
[17]Felemban E. Performance analysis of RFID framed slotted Aloha anti-collision protocol[J]. Journal of Computer and Communications, 2014, 2(1): 13-18.
[18]Wang Zuliang, Zhang Ting, Fan Lingyan, et al. Dynamic frame-slotted ALOHA anti-collision algorithm in RFID based on non-linear estimation[J]. International Journal of Electronics, 2019, 106(11): 1769-1783.
[19]Wang Zuliang, Huang Shiqi, Fan Lingyan, et al. Adaptive and dynamic RFID tag anti-collision based on secant iteration[J]. PLoS ONE, 2018, 13(12): 1-16.
[20]Ehsan V, Rabab K W D, Ian F B. Performance analysis of RFID protocols: CDMA versus the standard EPC Gen-2[J]. IEEE Transactions on Automation Science and Engineering, 2014, 11(4): 1250-1261.
[21]Teng Jiangfu, Xuan Xiuwei, Bai Yu. A Fast Q algorithm based on EPC Generation-2 RFID protocol[C]// The 6thInternational Conference on Wireless Communications Networking and Mobile Computing, Chengdu, China, 2010: 1-4.
[22]Hessar F, Roy S. Energy based performance evaluation of passive EPC Gen 2 class 1 RFID systems[J], IEEE Transactions on Communications, 2013, 61(4): 1337-1348.
[23]Vahedi E, Ward R K, Blake I F. Analytical modeling of RFID generation-2 protocol using absorbing Markov chain theorem[C]// IEEE Global Communications Conference, Anaheim, CA, USA, 2012: 385-390.
[24]EPC radio frequency identity protocols class-1 generation-2 UHF RFID protocol for communications at 860MHz~ 960MHz Version 1.2.0[Z]. EPCglobaI Inc. 2008.
[25]Vogt H. Efficient object identification with passive RFID tags[C]//Proceedings of the 1thInternational Conference on Pervasive, Zurich, Switzerland, 2002: 98-113.
[26]Park J, Chung Minyoung, Lee T J. Identification of RFID tags in framed-looted ALOHA with robust estimation and binary selection[J]. IEEE Communications Letters 2007, 11(5): 452-454.
[27]陈毅红. 动态环境下RFID标签防碰撞协议研究和RFID应用[D]. 成都:西南交通大学,2015.
Chen Yihong. Tag Anti-Collision Protocol of the RFID System Under the Dynamic Environment and RFID Application[D]. Chengdu: Southwest Jiaotong University, 2015. (in Chinese with English abstract)
RFID batch-tag identification in quality traceability of agricultural products
Wang Zuliang, Guo Jianxin, Zhang Ting※, Li Wenchen, Cao Chuangle, Yu Hongtao
(710123,)
The efficiency of the system could be greatly improved by using the Radio Frequency Identification (RFID) batch tag identification in the quality traceability of agricultural products. In this study, a tracing system of agricultural products based on RFID technology was designed. This system consisted of a tracking subsystem that was from the planting side to the consumption side and a tracking subsystem that was from the consumption side to the planting side. This system designed the information processing process of agricultural product planting, storage information processing, transportation information processing, distribution and distribution information processing, and terminal consumption information processing. This system also designed a three-level Internet of things architecture. Compared with the traditional agricultural product traceability system based on bar code, the one based on RFID technology was more flexible and accurate and had a better application prospect. In the agricultural product traceability system, especially in the courses of delivery and storage, batch identification of an entire truck of product tags needed to be conducted inbound and outbound. For frequently used forklift transport, entire tags attached to products in a forklift also needed to be identified simultaneously so that automatic rapid processing of transport, loading, and allocation of warehouse location could be accomplished. Batch tag identification was the most obvious advantage of RFID, but it would produce tag signal interference with each other and result in tag collision. Therefore, the anti-collision method was the key technology to the agricultural product traceability system.In this study, a model of agricultural product traceability system based on radio frequency identification technology was established, and the implementation of the storage link was presented. In the process of traceability, batch identification of an entire truck or forklift of the agricultural product greatly improved the management efficiency and shortened the circulation time of the product. However, the tag collision problem was inevitable due to the non-cooperation mechanism among tags. Therefore, the tag anti-collision method was a key technology of the agricultural product traceability system. A tag anti-collision method was excogitated and a frame slotted Aloha tag anti-collision method that adaptively and dynamically adjusted frame length was proposed aiming at traceability application environments of agricultural products. In this method, the initial tag population size was estimated when the number of successful slots, idle slots, and collision slots was acquired using statistical calculation only after the first frame identification so that the length of the following frame could be optimized and the optimal identification could be actualized, significantly improving the overall throughput performance. Based on the traceability system designed and the tag anti-collision method proposed, this study used Monte Carlo simulation to compare the throughput performance of the proposed method with the Vogt method and Q algorithm. The global throughput was an important index to measure the performance of RFID batch identification, and it was defined as the ratio of the time occupied by the transmission information to the total time consumed by the whole identification cycle. Taking the tracking and traceability of tea as an example, the throughput performance and delay performance of the anti-collision method for batch identification tags were simulated. Besides, the effect of initial frame length on throughput performance was simulated. The simulation results of RFID batch tag identification in agricultural product quality traceability showed that the global throughput was between 20% and 32%. It also showed that the proposed anti-collision algorithm applied to the designed agricultural product traceability system significantly improved the identification efficiency, and the overall throughput performance was improved by more than 30% compared with the Q algorithm.
agriculture products;traceability; tags; batch identification; anti-collision; global throughput
王祖良,郭建新,张婷,等. 农产品质量溯源RFID标签批量识别[J]. 农业工程学报,2020,36(10):150-157.doi:10.11975/j.issn.1002-6819.2020.10.018 http://www.tcsae.org
Wang Zuliang, Guo Jianxin, Zhang Ting, et al. RFID batch-tag identification in quality traceability of agricultural products[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(10): 150-157. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2020.10.018 http://www.tcsae.org
2020-02-25
2020-04-20
陕西省重点研发计划重点项目(2018ZDXM-NY-014);陕西省技术创新引导专项(基金)项目(2020CGXNG-035);西安市科技计划项目(201805043YD21CG27(1),2019218414GXRC020CG021-GXYD20.6);西京学院高层次基金项目(XJ17B06)
王祖良,博士,教授,主要从事物联网、RFID、智慧农业等方向的科学研究和技术研发。Email:zlwang@nudt.edu.cn
张婷,讲师,主要从事物联网、RFID技术研究。Email:zhangting1@xijng.edu.cn
10.11975/j.issn.1002-6819.2020.10.018
TP311.13
A
1002-6819(2020)-10-0150-08
猜你喜欢
中国储运(2022年11期)2022-11-30
中国储运(2022年11期)2022-11-30
中国储运(2022年11期)2022-11-30
英语世界(2020年10期)2020-11-06
舰船电子对抗(2020年2期)2020-06-23
英语世界(2020年2期)2020-03-08
建材发展导向(2019年10期)2019-08-24
经济研究导刊(2018年26期)2018-11-14
科学与技术(2018年23期)2018-06-17
山东工业技术(2016年5期)2016-03-04