自动驾驶传感器技术
2020-07-09 21:10王田
汽车世界·车辆工程技术(中) 2020年1期
王田

摘 要:本文对重要汽车技术国的自动驾驶传感器技术的专利申请概况进行了介绍,并针对申请量和活跃度均处于领先的摄像头技术和激光雷达技术进行重点专利分析,展示了摄像头和激光雷达技术的发展现状和趋势。
关键词:自动驾驶;传感器;专利技术
1 自动驾驶传感器技术专利概况
自动驾驶中,摄像头、激光雷达、毫米波雷达均为重要的感知外界环境的传感器,处理器获取和融合多种传感器的测量结果,通过算法进行判断决策,并对自动驾驶车辆发出控制指令,以保障自动驾驶行车安全。
中、美、韩、日、德作为世界主要的汽车技术来源国和汽车生产制造国,均已在自动驾驶传感器技术领域进行了研发投入和专利布局,以抢占技术和专利高地。在专利申请数量方面,中美处于领先地位,而在专利申请活跃度(专利申请量的近三年均值与近十年均值的比值)方面,中国具有绝对优势,显示了中国的研发投入力度较大,技术创新较为活跃,技术发展具备较大潜力。
2 自动驾驶传感器技术分析
针对自动驾驶传感器技术中申请量和活跃度均处于领先的摄像头技术和激光雷达技术进行专利分析。
(1)摄像头技术。在自动驾驶中,摄像头具备图像识别信息量丰富、实时性好、体积小、能耗低的优点,被广泛应用在障碍检测、道路检测、驾驶员检测等场景中。障碍检测主要针对道路中出现的妨碍车辆正常行驶行人、车辆、路障等目标物进行识别;道路检测主要针对道路中的车道线、停止线、斑马线、信号灯、限速标识等进行识别;驾驶员检测主要针对驾驶员出现的疲劳驾驶、酒驾等异常状态进行识别。随着成像技术的发展,全景视觉、立体视觉的应用使得感知的環境信息更为丰富,而机器学习算法的不断进步也使得感知的环境信息更为准确。
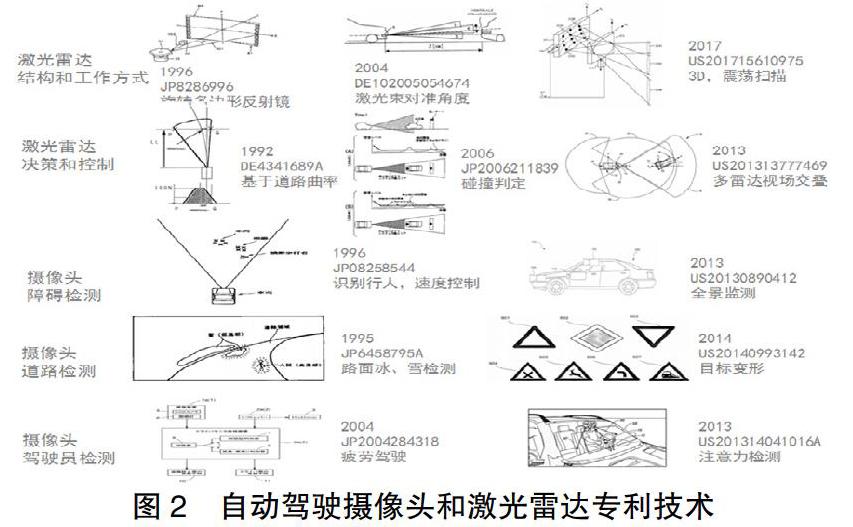
图2示出了自动驾驶摄像头重要专利技术。在障碍检测方面,2000年以前,JP08258544提出了识别道路中出现的行人,进行自动速度控制,同时期,还提出了检测周围行驶车辆,进行变道辅助控制;2000年以后,提出了针对车辆的姿态、方向变化进行分析,准确判断车辆行使信息,以及通过红外传感器提供夜视辅助,在夜间对路人进行有效识别,提高驾驶安全;2013年,US20130890412提出了通过全景成像技术,对车辆周围环境进行检测,以躲避障碍,同时期,专利技术还包括通过多摄像头对盲区进行重点监控,以及通过立体视觉,提高环境感知能力。
在道路检测方面,2000年以前,JP6458795A提出了检测路面的冰雪,保证汽车安全行驶,同时期,专利技术还包括识别道路标识线,进行行驶过程的车道保持,以及检测路边的道路警示牌,获取道路的特殊状态;2000年以后提出了对存在遮挡的交通标志进行准确识别,2014年US20140993142提出了对发生变形的交通标志牌进行智能识别,提高了路况感知能力。
驾驶员检测方面,相关技术出现时间较晚,2004年,JP2004284318提出了对驾驶员的疲劳驾驶状态进行分析预警,2013年US201314041016A提出了对驾驶员进行注意力检测,以实现对行车安全的辅助控制。
(2)激光雷达技术。在自动驾驶中,激光雷达是最为热门的传感器,不受环境光限制,能够探测微小目标,对三维环境进行准确建模。激光雷达的发展经历了从一维到多维,随着线束的增加,获取的目标信息更为详细,环境感知能力相应提高。激光雷达按照工作方式分为旋转式和固定式,相比来看,旋转式激光雷达的测量精度高、探测范围大,但是体积大、安装要求高,固定式激光雷达的扫描速度快、体积小、易调节,但是存在探测范围局限。
图2示出了自动驾驶激光雷达重要专利技术。在结构和工作方式方面,2000年前,JP8286996提出了设置旋转多边形反射镜,优化激光雷达结构,同时期还提出了根据现有测量结果反馈调整扫描方式、脉冲控制方式等,优化测量结果;2001至2010年间,DE102005054674提出了调整激光对准角度,提升激光雷达的性能;2011年后,提出了对光束扩展角的优化调整,2017年US201715610975提出了3D震荡扫描,对空间信息进行更好的描绘。
在控制和决策方面,2000年前,DE4341689A提出了基于道路曲率的环境信息感知技术,同时期还提出了基于参考面高度差的路面环境感知,以及行车过程中对路径、距离、是否检测到障碍物的判断技术;2001至2010年间,JP2006211839提出了基于激光雷达检测信息作出对碰撞的预判,同时期专利技术还包括障碍物的数量的判定等;2013年US201313777469提出在多雷达视场交叠的条件下的数据融合处理,优化环境感知结果。
3 小结
本文通过中、美、韩、日、德的自动驾驶传感器技术的专利申请情况对比,反映出中美两国在专利申请数量上的领先地位,以及中国技术创新较为活跃,技术发展潜力较大;对申请量和活跃度均处于领先的摄像头技术和激光雷达技术进行重点专利分析,展示了摄像头和激光雷达技术的发展现状和趋势。
参考文献:
[1]叶彬强,王一.基于人工势场法的机器人避障算法[J].重庆理工大学学报(自然科学),2012(09).
[2]刘新良,迟永滨.汽车AFS头灯随动转向规律研究[J].机械设计与制造,2011(08).
猜你喜欢
中国电子报(2019年54期)2019-10-24
时代英语·高一(2019年1期)2019-03-13
中学物理·初中(2017年8期)2018-03-06
中国科技纵横(2017年4期)2017-05-16
移动通信(2016年24期)2017-03-04
中国市场(2016年31期)2016-12-19
家用汽车(2016年9期)2016-11-04
环球时报(2016-08-16)2016-08-16
科教导刊·电子版(2016年6期)2016-04-19
科技与创新(2016年5期)2016-03-17