汽车站和火车站安检机器人
2020-07-09 03:26吴越
发明与创新·中学生 2020年7期
吴越
目前市场上的车站安检机器人不仅结构复杂,而且功能单一,没有设置可折叠装置和摄像头放置槽,闲置时,不能将机器人手臂折叠收起,容易损坏摄像头。
我设计的汽车站和火车站安检机器人的手臂可以任意摆动,既可上下、左右扫描,也可回转折叠,使安检更方便。
一、作品结构及原理
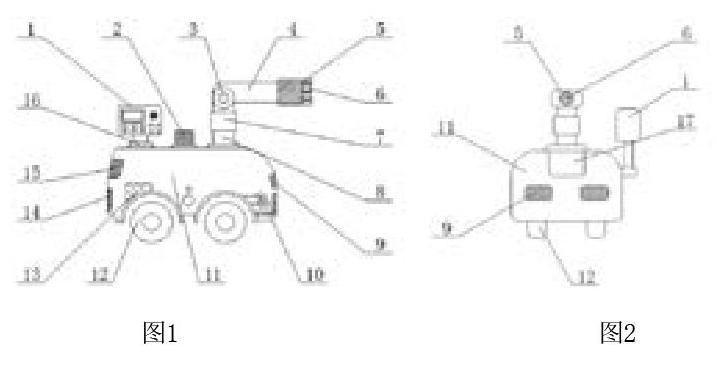
图1为汽车站和火车站安检机器人的结构示意圖,图2为作品正视图。
使用时,先通过控制面板打开机器人,再编写、输入特定的安检程序,然后在控制面板上打开电机,驱动机器人行走轮,实现机器人的行走。随后,让机器人按照特定的程序进行安检,并通过旋转机器人腰关节和肩关节调整红外线发射器和摄像头的角度,以方便安检。
当发现乘客带有危险物品时,警报灯会亮起,同时控制面板上的蜂鸣器也会进行语音播报。机器人的尾灯和前灯用以提醒旅客进行安检。
安检结束后,可将机器人手臂折叠,同时将摄像头放置在摄像头放置槽内,再通过控制面板关闭设备。
二、创新点
1.机器人手臂可折叠,将摄像头放置在摄像头放置槽内,避免了闲置时易被损坏的问题。
2.仿照汽车结构,使机器人可以平稳地行走,并且利用新能源电能驱动,节能环保。
3.设置了碰撞传感器,防止发生碰撞后损坏机器人内部元件,对机器人起到保护作用。(指导老师:池跃慧)
猜你喜欢
阅读(快乐英语中年级)(2020年8期)2020-11-13
水利与建筑工程学报(2019年6期)2020-01-08
新教育论坛(2019年27期)2019-09-10
城市道桥与防洪(2019年7期)2019-02-18
电脑爱好者(2018年18期)2018-11-05
三联生活周刊(2017年37期)2017-09-11
电脑爱好者(2017年9期)2017-06-01
中国医学装备(2016年6期)2016-12-01
科技视界(2012年8期)2012-08-15