基于弹目关系的多尺度跟踪方法研究∗
2020-07-09 12:37石胜斌胡子阳
舰船电子工程 2020年5期
石胜斌 陈 栋 胡子阳 雷 鸣
(1.陆军炮兵防空兵学院高过载弹药制导控制与信息感知实验室 合肥 230031)
(2.陆军炮兵防空兵学院研究生大队 合肥 230031)
1 引言
目标跟踪技术在军事、医学、交通等领域有着非常广泛的应用,是计算机视觉领域重要的基础性研究课题之一[1~2]。近十几年来,无模型目标跟踪技术虽取得了较大进展,但由于目标图像受几何形变、光照变化、局部遮挡、快速运动等问题的影响,使得无模型目标跟踪仍是一个难题[3]。近几年,相关滤波方法[4~5]被引入视觉跟踪领域,并就跟踪过程中存在的常见问题对算法做出了相应调整和改进,在实时性和鲁棒性方面都有着不错的效果。同时,由于相关滤波类算法原理简单,可操作性强,对特定目标作针对性调整可取得较为理想的效果。
在精确制导领域,目标跟踪技术作为关键一环,其性能的优劣直接影响了打击效果的好坏。导弹在接近目标的过程中,视场中目标的尺度是势必会发生变化[6~7]。传统相关滤波算法为单一尺度估计,在目标尺度发生变化时,跟踪误差会不断积累并最终导致跟踪失败。尺度自适应与多特征融合跟踪器(Scale-adaptive and Multi Feature Integration Tracker,SAMF)[8]和强判别性尺度空间跟踪器(Discriminative Scale Space Tracker,DSST)[9]是 目前基于相关滤波器的目标跟踪算法中,能够有效解决目标尺度变化问题的代表算法。DSST算法通过加入与位置滤波器独立的尺度滤波器,虽然跟踪效果有所提升,但该算法的计算量明显增加,无法满足弹载平台对于实时性的要求[10]。SAMF算法通过加入尺度池,既在确定目标区域时对初始目标做若干尺度的缩放,经相关滤波器得到最大响应值所对应的尺度即为此时目标尺度,虽然其鲁棒性不及DSST算法,但该算法原理简单,计算量小,能够满足实时性要求[11]。
本文基于SAMF算法,结合弹目运动关系,对尺度池参数的选取进行探究,通过对比实验分析,以找出能够有效解决弹载目标跟踪中的尺度变化问题,同时能兼顾实时性的要求。
2 SAMF算法
2.1 算法原理
SAMF算法是核化相关滤波器(High-Speed Tracking with Kernelized Correlation Filters,KCF)[12]的改进算法,该算法的贡献主要有两点:一是将单一HOG特征拓展为HOG+CN+Gary的多特征融合,主要方法如下:
x是传统KCF算法中单一HOG特征,而xc中是三种特征的融合。算法相当于将三种特征进行简单的矢量叠加[13]。

图1 SAMF算法示意图
二是尺度的改进,由于KCF算法为单一尺度,当目标的尺度发生变化时会导致跟踪精度的下降。SAMF算法中引入尺度池的策略,论文中尺度池 为 Pools={0.985,0.99,0.995,1.0,1.005,1.01,1.015},既步长为0.005的7个尺度。其思想很简单,就是在确定目标区域时对初始目标做若干个尺度的缩放,经相关滤波器得到对应响应值,最大响应值所对应的尺度即为此时目标尺度。算法的示意图如图1。
2.2 跟踪效果
我们使用KCF算法和SAMF算法以及本文算法在同一视频序列上进行跟踪测试,目标为1:30坦克模型,利用无人机携带摄像头由高到低拍摄,实验结果如图2所示。
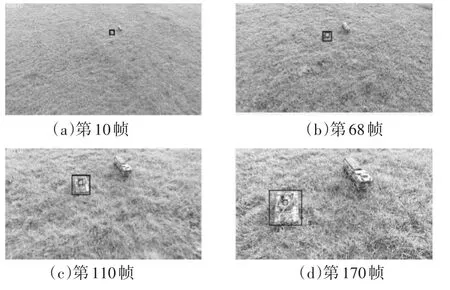
图2 跟踪效果图
由图2可知,三种算法均能基本锁定每帧中目标位置。由于KCF算法对应跟踪框没有随目标的尺度变化而变化,仅得到了目标部分纹理信息;SAMF算法虽有一定的尺度调整,但由于目标尺度变化较快,跟踪器的尺度估计跟不上目标的尺度变换,同样也仅得到部分纹理信息。而本文的改进算法具有较好的跟踪效果。
3 尺度池改进与结果分析
3.1 参数数目选择
SAMF算法中的尺度池包含7个尺度,参数的选取应兼顾跟踪器的精确度与实时性。尺度参数越多并不意味着精度越高,因为一旦发生偏差会导致误差积累,最终导致跟踪失败。本实验首先令尺度池参数步长不变,改变参数数目,如表1所示。

表1 尺度池选择
通过在OTB50[14]中具有尺度变化的数据集上进行测试,结果如下。

图3 OTB测试结果
由实验结果可知,当采用7个尺度时效果最好,不过3个尺度的跟踪精度虽降低了3%,但其跟踪速度却提升了70%,故本文采用3个尺度的SAMF算法。
3.2 弹目运动关系简化模型
本实验采用无人机摄像机模拟弹载摄像头,故将运动模型简化,假定无人机向目标区域的运动为匀速直线运动。示意图如图4所示。
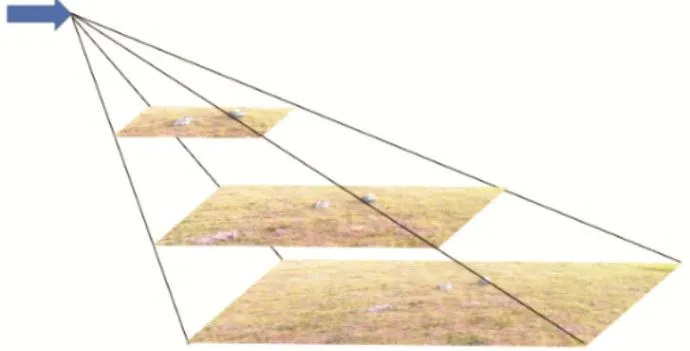
图4 弹目运动关系示意图
设每帧目标尺度变化率为k,目标尺寸为S0,背景尺寸分别为S,S’则有:

设无人机运动速度为v,初始高度为h,算法帧率为f,则在1s内:

无人机的运动速度v≈10m/s,起始高度h≈14m,帧率f=65fps由此可得:k≈1.02。故尺度池设定为{1.00,1.01,1.02}。
3.3 对比实验与分析
根据所得结果,我们将本文算法与单一尺度的KCF算法以及传统SAMF算法进行对比,通过计算三种算法的跟踪重叠率[15],既计算预测框与标准框的重叠面积占标准框面积的百分比,以达到定量评估的目的,实验配置及运行环境为
名称CPU配置Core i5-7300HQ操作系统内存图像处理8G MATLAB2015、OpenCV3.1.1微软Windows 10
实验结果如图5所示。
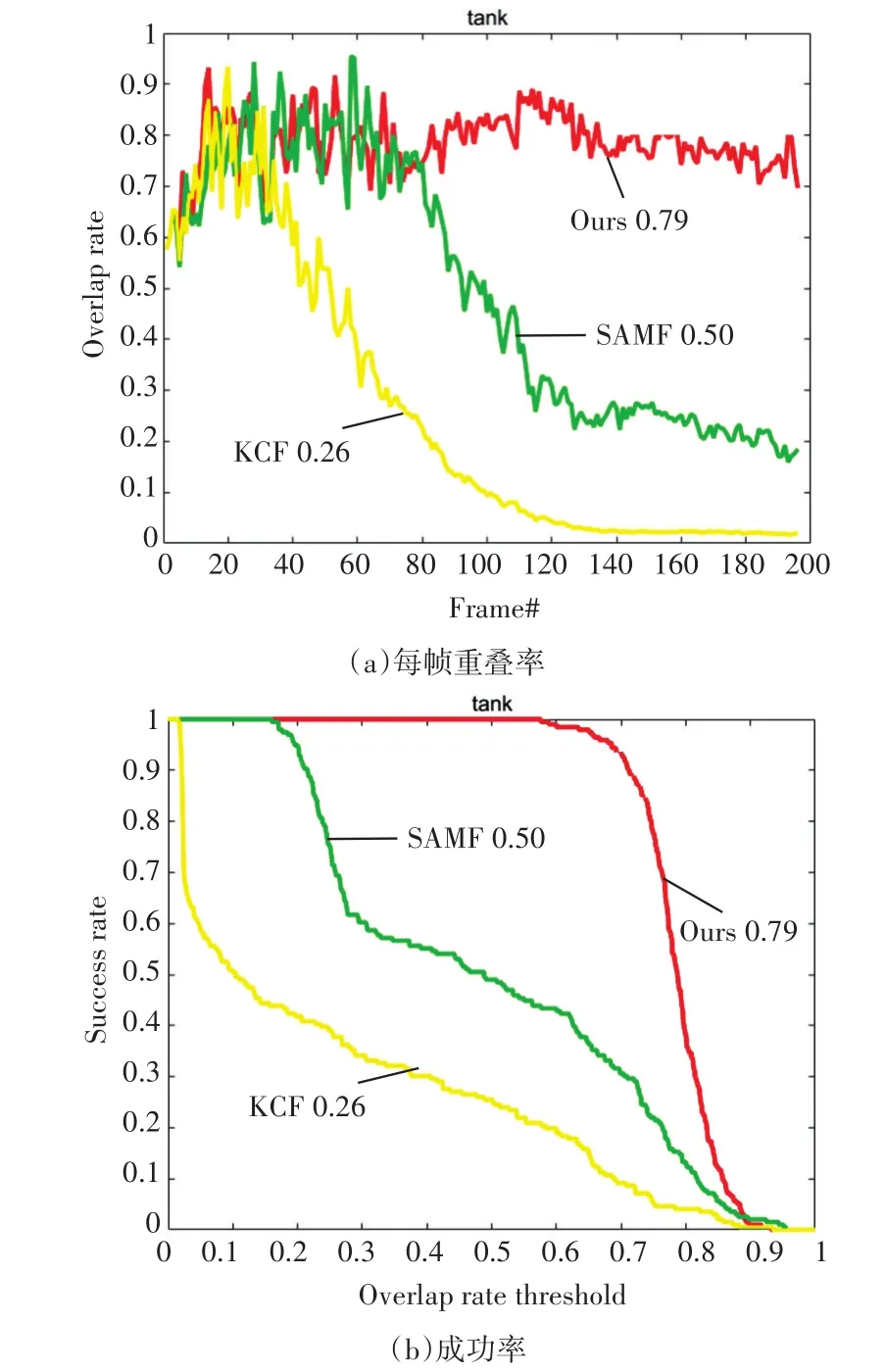
图5 三种算法重叠率
由实验结果可知,在弹目运动关系已知的前提下,针对特定的视频序列,本文算法精度较单一尺度的KCF算法提升了67.1%,较传统SAMF算法提升了36.7%,且能够满足实时性要求。
4 结语
本文针对弹载视频目标的尺度变化问题,在已知导弹与目标运动关系的前提下,通过对SAMF算法中尺度池的参数选取进行改进,使得其跟踪效果得到大幅提升,虽然本文的弹目运动关系模型较为简单,但本实验充分证明了该方法的可行性,为实现尺度自适应的弹载视频图像目标跟踪提供了新的思路。
猜你喜欢
客联(2022年4期)2022-07-06
成都信息工程大学学报(2022年2期)2022-06-14
太阳能(2022年3期)2022-03-29
装备环境工程(2020年3期)2020-04-03
环境(2019年10期)2019-10-24
当代工人·精品C(2019年2期)2019-05-10
电子技术与软件工程(2016年22期)2016-12-26
电脑知识与技术(2016年24期)2016-11-14
物联网技术(2015年10期)2015-11-10
卷宗(2013年2期)2013-05-14