
基于PLC的振动颗粒康复仪控制系统设计与试验
2020-07-08 09:45曲云霞王梦迪侯书军李慨白小帆王世阳
河北工业大学学报 2020年3期
曲云霞 王梦迪 侯书军 李慨 白小帆 王世阳


摘要 针对课题组研发的振动颗粒康复仪,完成了控制系统设计并进行了相关试验,改善了该仪器应用过程中的操作性能。应用光电传感器与步进驱动系统的配合实现了零位控制,提高了康复仪启动的稳定性;将康复仪的主要工作参数(激振频率、振动方向角)转化为按摩方式、按摩强度等治疗参数,直观且容易操作;依据康复仪功能需求、控制系统功能需求,完成控制平台的搭建,通过离线仿真与在线试验,实现了康复仪控制系统的模块化、智能化及治疗时间的可调节性,为康复患者提供菜单式治疗方案。
关 键 词 康复仪;控制系统;颗粒流;PLC;仿真;试验
中图分类号 TP272;R496 文献标志码 A
Design and test on control system of particle vibration rehabilitation based on PLC
QU Yunxia, WANG Mengdi, HOU Shujun, LI Kai, BAI Xiaofan, WANG Shiyang
(School of Mechanical Engineering, Hebei University of Technology, Tianjin 300130)
Abstract In this paper, the control system of the vibration particle recovery instrument developed by the research group has been designed and tested, and the operational performance during the application of the instrument has improved.The application of photoelectric sensor and stepping drive system has realized the zero-location control and improved the stability of rehabilitation instrument during start-up;The main working parameters (excitation frequency, vibration direction Angle) of the rehabilitation instrument are converted into therapeutic parameters such as massage method and massage intensity, which are intuitive and easy to operate.According to the functional requirements of the rehabilitation instrument and the control system, the control platform was built.Through offline simulation and online testing, the modularization, intelligence and adjustment of treatment time of the rehabilitation instrument control system have been realized to provide a menu-based treatment plan for rehabilitation patients.
Key words instrument; control system; particle flow; PLC; simulation; test
0 引言
自然災害(如地震、泥石流等)以及非自然事故(如车祸、工伤等)影响着人们的正常生活,当受灾人群肢体损伤程度较大时,需要通过手术修复甚至截肢治疗,机体的术后恢复是一个比较漫长的过程,对康复治疗提出了较高的要求[1-3]。控制系统可使被控对象趋于某种稳定状态[4-5],且具有较好的动态性能[6-7],临床治疗中要求这种康复设备需要和控制系统结合,使其具有一定程度上的信息自动处理功能和自动控制功能,优化康复治疗的效果[8]。
该康复仪旨在为截肢患者提供方便有效的治疗方式,其主要工作参数为激振频率和振动方向角。激振频率影响按摩强度,激振频率越高,振动电机转速越快,振动强度越大,颗粒流对肢体的按摩强度越强;振动方向角影响按摩方式,不同振动方向角下振动电机的空间位姿不同,激振力方向不同,康复仪中颗粒流的运动形式不同,从而实现不同的按摩方式。因此从对以上2种参数控制角度出发,根据康复仪的功能需求,对其控制系统进行设计,以实现其模块化、智能化及治疗时间的可调节性,为康复患者提供菜单式治疗方案。
1 控制系统的总体方案
设计一套可根据患者自身恢复状况选择治疗模式的康复仪控制系统。包括康复仪控制系统需求分析、功能分析、硬件组太和软件构架,以面板形式实现对康复仪的控制,并通过离线仿真与在线试验验证控制系统的设计功能、稳定性和可靠性。
1.1 振动颗粒康复仪的功能及需求分析
1)提供可选择的按摩强度模块,医生可根据正在接受康复训练患者所处的康复阶段进行选择。对于刚刚接受康复训练的患者而言,先进行低强度按摩,随着截肢患者创伤处耐受力的增强,可以接受的刺激强度的增加,而依次增加康复仪的按摩强度。
2)提供可选择的按摩形式模块,患者在接受康复训练时,需要对治疗肢体的不同位置进行刺激按摩,且同一位置需要不同的按摩方式,因此需要康复仪能够提供不同的按摩形式。
3)提供可选择的时间输入模块,根据截肢患者的恢复状态选择不同的治疗时间,提供小时、分钟、秒的输入界面,到达设定时间以后,定时指示灯亮,设备停止按摩工作,处于待机状态。
1.2 控制系统的主要功能分析
1)康复仪的参数采集预处理:根据为患者所选择的治疗方案,对相关工作参数(按摩强度、按摩形式、按摩时间)进行准确的采集与控制。
2)逻辑控制:通过逻辑顺控来实现康复仪相关的操作和动作。
3)急停控制:除关机状态外,当设备按照设定好的时间工作时,若出现紧急状况,可随时通过急停控制停止康复仪的工作。
1.3 康复仪控制系统框图
根据康复仪功能需求、控制系统功能需求设计控制系统框图如图1示。
在康复仪输入检测端,零位待机按钮用以配合传感器实现振动电机在任何位置的回归零位控制,对应输出响应端的零位指示灯;强度选择按钮开启按摩强度选择界面,对应强度选择模块;方式选择按钮开启按摩方式选择界面,对应方式选择模块;时间设定按钮开启时间输入界面,对应时间设定模块。
1.4 控制系统构成
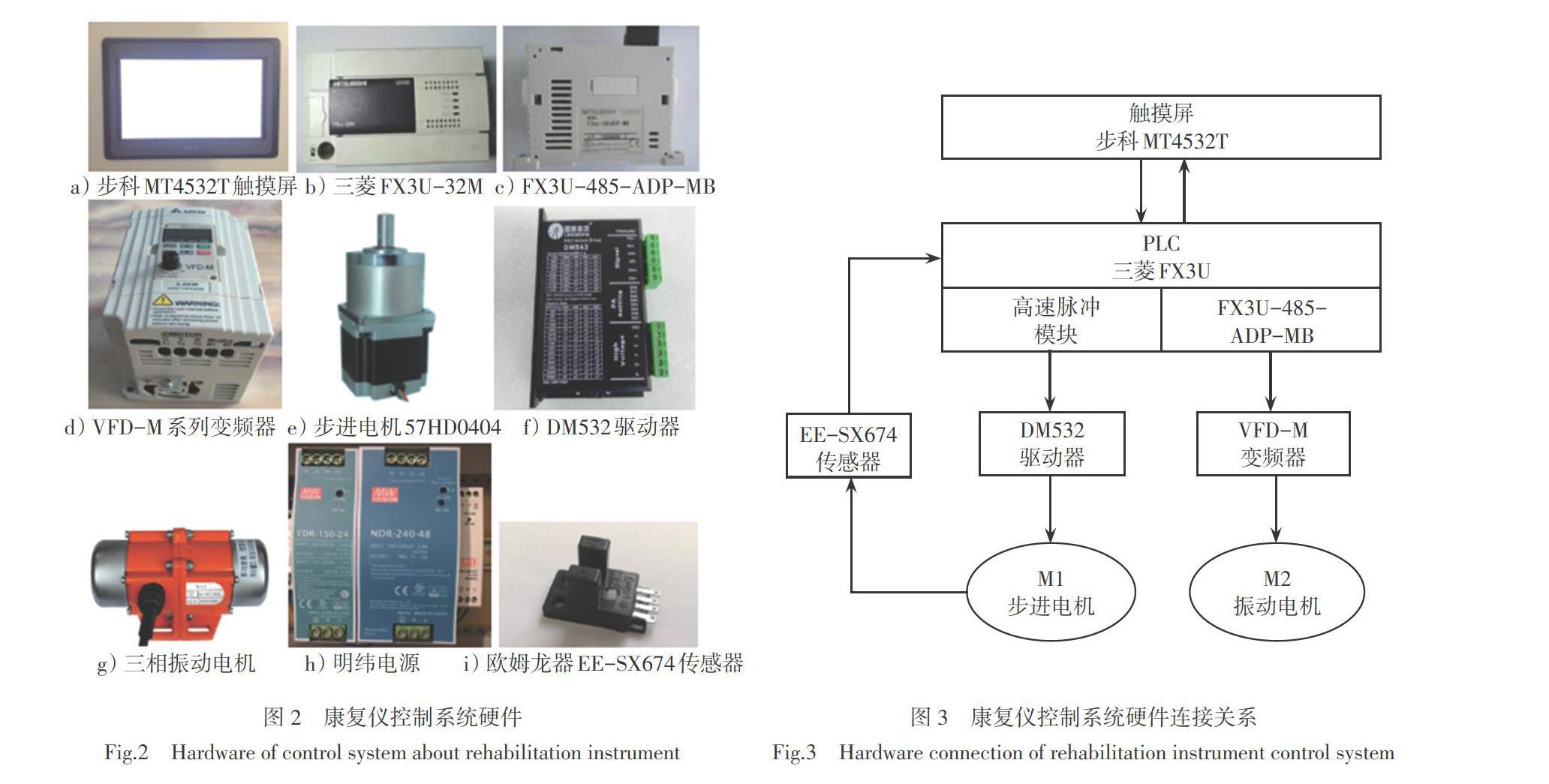
控制系统由控硬件和软件构成,康复仪控制系统主要硬件的选择如图2所示。
硬件间的连接关系如图3所示。
触摸屏显示器屏幕前的触摸检测部件接受按摩强度、按摩方式、按摩时间等触摸信号并将其转换成触点坐标传送给PLC-CPU,同时又能接收PLC-CPU发来的命令并加以执行;PLC通过对程序的扫描及运行,实现指定按摩强度、按摩方式、按摩时间等任务;PLC自带高速脉冲控制模块,通过驱动器控制步进电机旋转,配合传感器实现零位控制,并调节振动电机至指定空间位姿,从而得到相应的按摩方式;PLC结合RS-485通信模块与变频器进行通信,控制振动电机的转速,调节激振力大小,从而实现康复仪按摩强度的控制。
选用GX Works2编译控制系统各功能部分的程序梯形图,该软件专用于PLC设计、调试工作,操作性能好;选用Kinco HMIware编译触摸屏的组态画面,该软件自带模拟功能,达到的效果可以和实物基本一致,方便现场调试程序时不必重复的下载程序,节省了许多时间。
2 康复仪各功能模块子程序
依据康复仪控制要求,开机后,康复仪处于待机状态,控制柜上待机指示灯亮;根据截肢患者的康复状态选择按摩强度,触摸屏上强度选择模块指示灯亮;根据治疗时对颗粒流运动方式的要求选择按摩形式,触摸屏上形式选择模块指示灯亮;在时间输入界面设定时间,当治疗时间尚未到达设定时间时,设备一直处于治疗状态,当治疗时间到达 设定时间后,设备停止治疗状态,并返回待机状态。康复仪治疗流程如图4所示。
2.1 通信子程序设计
按摩强度功能模块用到的变频器需要和PLC-CPU进行通讯设置,应用MODBUS协议编写通信协议子程序,以实现对振动电机激振力的控制,采用数据长度为8位、停止位为1位的偶校验,波特率(bps)为19 200,硬件类型选用的RS-485模块,b0~b3为(0 0 0 1)、b4~b7为(1 0 0 1)、b8~b11为(0 0 0 0)、b12~b15为(0 0 0 1);通讯协议采用RTU模式设定,b0~b3为(0 0 0 1)、b4~b7为(0 0 0 0)、b8~b11为(0 0 0 0)、b12~b15为(0 0 0 0);从站响应超时设置为2 000 ms;播放延时设置为400 ms;帧间延时设置为10 ms;重试次数设置为3次。通信子程序梯形图如图5所示。
2.2 系统调零子程序设计
相比伺服驱动系统,选用步进驱动系统减低了成本,但同时使系统为开环控制,截肢患者接受治疗时常需要对振动电机的位姿进行调整。为保证振动电机位姿调节的准确性,提供可靠的按摩方式,并防止振动电机过量的单向旋转造成电机线缠绕而影响康复仪正常工作,为控制系统设计调零程序,保证每次治疗结束后,振动电机可以回归零位,系统的调零控制流程图如图6所示。
按下零位按钮进入调零状态,若此时已是零位状态,则零位指示灯亮,康复仪在零位待机;否则进入调零状态,调零过程为正传90 °、反转180 °,期間任意时刻到达零位,零位指示灯亮,康复仪在零位待机。该文应用PLC PLSY指令控制步进电机的转速及旋转量。
2.3 按摩强度选择子程序
振动电机是康复仪的动力源,为其提供激振力,激振力的大小由振动电机转速决定,应用变频器对振动电机进行调速控制,并根据不同激振频率下康复仪中颗粒流对肢体的按摩强度进行分级,即输入按摩强度等级,变频器便会控制振动电机按指定转速工作,康复仪按摩强度选择控制流程图如图7示。
本文应用PLC ADPRW指令实现对振动电机启、停及调速控制。
2.4 按摩方式选择子程序
振动电机的空间位姿决定了康复仪激振平台的振动方向角,振动方向角影响颗粒流的运动状态,颗粒流的运动状态又决定了康复仪的按摩方式,因此,控制系统通过对振动电机空间位姿的控制来实现康复仪按摩方式的转变。康复仪按摩方式控制流程图如图8所示。
应用PLSY指令将寄存器中输入的转速、旋转量发送给步进驱动系统,通过步进电机的旋转来调节振动电机的位姿。
2.5 按摩时间子程序
根据截肢患者对按摩治疗时间的要求为康复仪设定指定的工作时间,到达指定时间后,自动跳转到待机状态,应用PLC TCMP指令通过对时间比较结果的设定控制康复仪的治疗、待机,按摩时间设定流程图如图9所示。
2.6 触摸屏组态画面设计
根据康复仪控制系统需要实现的各项功能,应用Kinco HMIware软件对程序梯形图中各软元件进组态设计,为方便操作,将各功能模块分区处理,如图10所示。
3 控制系统的仿真与试验
3.1 控制程序的离线调试
通过更改各软元件的当前值对所编程序进行离线调试,如图11示。
调试模拟了控制系统的工作过程,分别调试各功能模块子程序,结果符合预期要求,依据逻辑顺控将各功能模块程序合并,整体调试,针对程序遗漏的互锁部分进行修正,并将功能多余重复部分进行改进,至结果符合控制要求且精炼为止。
3.2 控制程序的在线试验
控制程序的在线试验现场如图12所示。
将在Kinco HMIware软件中完成的组态设计导入触摸屏,如图10a)所示;将离线调试好的整个程序进行在线控制试验,如图10b)所示;通过康复仪样机试验对控制系统各功能模块进行验证,如图10c)所示。
通过在线试验中对康复仪控制系统各功能模块进行验证。振动电机在任意位姿下点击零位按钮,电机通过零位控制回归零位;在强度输入界面依次输入1-5,激振力逐渐增大,康复仪中颗粒运动剧烈程度逐渐升高,按摩强度逐渐增强;在按摩方式输入界面输入角度,振动电机旋转至指定位置,康复仪中颗粒流的运动形式根据激振力方向改变而变化,实现不同的按摩方式;在按摩时间输入界面输入时间,到达设定时间后,康复仪自动回归待机状态。试验结果符合预期要求。
4 结束语
通过对康复仪的工作需求、控制需求以及控制方案进行分析,对其控制系统进行设计,完成了如下工作。
1)面向输入端操作便捷的要求,将康复仪的主要工作参数(激振频率、振动方向角)转化为按摩方式、按摩强度等治疗参数,更直观且容易操作。
2)根据康復仪的功能需求,完成控制平台的搭建、控制柜的设计与加工和各功能模块程序的编译。
3)通过离线调试与在线试验,实现了康复仪样机调零、按摩强度分级、按摩方式转换、按摩时间可调节等功能。
参考文献:
[1] 李建军. 中国康复医学发展的回顾与展望[J]. 中国康复理论与实践,2011,17(1):1-4.
[2] 曾德昕,曾卓颐. 我国康复治疗技术专科教育:10年回顾与展望[J]. 中国康复医学杂志,2013,28(5):458-460.
[3] 喻洪流,胡秀枋,沈力行,等. 国内外康复医学的教育发展[J]. 中国临床康复,2006,10(44):182-184.
[4] 高瑞. 对PLC自动控制系统的可靠性问题与其设计方案的探究[J]. 科技展望,2015,25(3):150.
[5] NI K,HU Y H,LI X H. An overview of design,control,power management,system stability and reliability in electric ships[J]. Power Electronics & Drives,2017(2):DOI:10. 5277/PED170211 .
[6] XIA J,WANG Y. Development of comprehensive experimental equipment with automatic control principle and its teaching application[J]. Experimental Technology & Management,2017,46(1):223-225.
[7] 章云,陈玮,谢莉萍,等. “自动控制原理”课程建设[J]. 广东工业大学学报(社会科学版),2008,8(增刊):200-201,208.
[8] KRIVOSHEEV S V,OLEYNIK R V,BORISOV I I,et al. Development of the design and description of the control system of the hand rehabilitation device[C]//2017 IEEE 15th International Conference on Industrial Informatics (INDIN),Emden. IEEE,2017:326-330.
[责任编辑 杨 屹]
猜你喜欢
科教新报(2022年1期)2022-01-25
天天爱科学(2020年6期)2020-09-10
红领巾·探索(2020年2期)2020-05-19
电脑报(2019年10期)2019-09-10
领导文萃(2018年8期)2018-06-27
中国新闻周刊(2016年46期)2016-12-26
航空模型(2016年1期)2016-03-01
股市动态分析(2015年24期)2015-09-10
数字家庭(2009年3期)2009-06-23
物理教学探讨(2009年2期)2009-03-30
