音圈致动快速反射镜的降阶自抗扰控制
2020-07-07 02:53杨秀丽修吉宏李友一
光学精密工程 2020年6期
黄 浦,杨秀丽,修吉宏,李 军,李友一
(1. 中国科学院 长春光学精密机械与物理研究所 中国科学院航空光学成像与测量重点实验室,吉林 长春 130033;2. 空军航空大学,吉林 长春 130022)
1 引 言
在航空光电成像、天文望远镜和激光通讯等领域,快速反射镜(Fast Steering Mirror,FSM)被广泛用来实现自适应光学隔振及远距离图像稳定[1-3],经常与较大惯量框架运动机构构成复合轴用来实现二次视轴稳定,能够大幅提高视轴稳定精度和控制带宽[4]。因FSM具有惯量小、响应快、带宽高、加速度大的特点,在航空光电设备中,一般用于传感器曝光期间的视轴稳定或大惯量框架摆扫像移或速度残差的快速补偿[5-6]。在实际工程应用中,FSM有压电陶瓷致动和音圈致动两种。相比于压电陶瓷致动,音圈致动的FSM具有结构简单、驱动电压低、体积小、行程大等特点。音圈致动FSM行程大、带宽高,能使成像帧频更高,其像移补偿能力更强。因此,这类FSM在航空光电成像中的应用越来越广泛[7]。
在实际工程应用中,FSM控制是典型的位置控制,只有位置传感器作为反馈,一般使用电涡流传感器、四象限传感器和电容传感器等作为位置反馈元件[8]。即使在航空成像中采用FSM执行像移速度补偿功能,也需要把惯性速率敏感元件敏感到的角速率信息进行积分后作为FSM位置的参考输入,以位置控制方式执行速度补偿[5]。目前,FSM控制依然以传统PID思想为主,如二阶或多阶超前滞后控制、PID和自适应前馈复合控制、PID加零相差轨迹控制等[9-11]。针对FSM的一些先进控制方法也取得了一些成果,比如自适应鲁棒控制[4]、模糊控制[12]等,但一般实现过程复杂,难以满足工程应用需求。
控制问题的本质就是解决不确定性问题,即消除对象内部模型的不确定性和外部扰动,反馈的根本目的也在于此[13-14]。自抗扰控制(Active Disturbance Rejection Control,ADRC)的核心是扩张状态观测器(Extended State Observer,ESO),其突出特征是能把作用于被控对象的所有内部模型与外部扰动等不确定因素都归结为总扰动来进行估计和补偿[15-16]。这种控制方法借鉴了现代控制理论中的观测器思想,但又摆脱了观测器设计对模型精确性的依赖。在自抗扰控制理论中,扩张状态观测器阶次比系统阶次高一阶。但对系统阶次而言,相对阶越高,则带来的相位滞后越大。若要降低扩张状态观测器带来的相位滞后,自然就需要降低观测器的阶次,前提是系统输出能够通过传感器等其他手段获得,且其输出的多阶导数已知[17-18]。这种采用了降阶扩张状态观测器的自抗扰控制称为降阶自抗扰控制。
本文以一种应用于航空光电载荷的音圈电机驱动FSM为研究对象,利用获取的对象模型设计了通用ADRC。鉴于FSM位置输出采用电涡流传感器直接测量,因此设计了降阶后的ADRC进行控制,并采用跟踪微分器预测FSM位置的微分作为降阶扩张状态观测器的输入。这种方法不仅降低了观测器的设计与实现难度,还充分了利用了模型和传感器输出等已知信息,提升了FSM的位置阶跃响应动态性能及用于航空光电载荷成像进行像移速度补偿时的速度响应性能。
2 快速反射镜及其模型
作为本文被控对象的FSM如图1所示。该反射镜采用柔性转轴,由两只音圈电机采用推拉方式驱动,设计机械行程为±1°。

图1 快速反射镜实物Fig.1 Physical map of fast steering mirror
含有柔性转轴的FSM系统阻尼非常小,一般可以等效为弹簧-质量块模型进行描述。当FSM偏离平衡位置时,结构中的柔性轴就会产生弹性力矩。通常情况下,由于FSM采用了柔性轴,忽略电气时间常数,系统模型可简化为一个典型的二阶欠阻尼环节,其开环传递函数如式(1)所示:
(1)
其中:K为开环增益,ζ为阻尼,ωn为自然频率。
通过FSM的开环阶跃响应可以比较准确地获取其模型。FSM的开环阶跃响应曲线见图2。输入为电压值,输出为FSM的转角,曲线纵坐标为输出与输入之比。
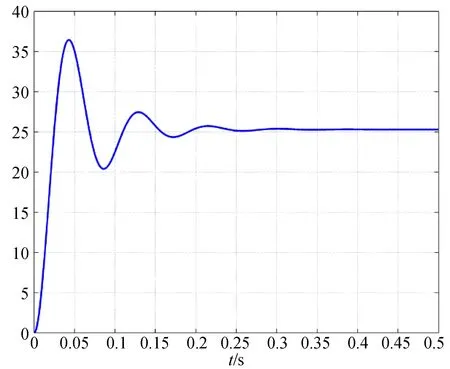
图2 FSM开环阶跃响应曲线Fig.2 Open loop step response curve of FSM
从开环阶跃响应曲线可知,开环增益K=25.3,峰值时间tp=0.043 s,超调量σ=36.4%。根据二阶欠阻尼系统峰值时间、超调量与阻尼、自然频率的近似关系,可以求得FSM系统的阻尼与自然频率。其中,系统阻尼为:
(2)
系统自然频率为:
(3)
根据式(1),FSM从电压输入到转角输出之间的开环传递函数为:
(4)
3 FSM降阶自抗扰控制器设计
3.1 FSM的通用扩张状态观测器设计
根据现代控制理论,若系统满足可观性,就能通过其输入和输出信号对其状态进行观测。对于扩张状态观测器,目前工程中应用最广泛的是基于线性增益矩阵的线性扩张状态观测器(Linear Extended State Observer,LESO),以LESO为基础的自抗扰控制称为线性自抗扰控制(LADRC)。根据观测器带宽参数设计LESO方法[19],使扩张状态观测器的设计实现难度大幅降低。
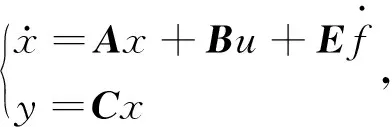
以FSM作为被控对象,其传递函数式(1)的微分形式可以写为:
(5)
假设系统未知模型信息及外部扰动总和为w,则式(5)可以写为:
(6)

(7)
扩张状态x3代表了系统未知的模型信息与外部扰动总和。将它写为矩阵形式为:
(8)

由二阶被扩张为三阶后的FSM对象的状态观测器可设计为:
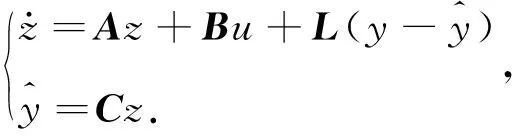
(9)
λ(s)=s3+(β1+2ζωn)s2+
(10)
根据扩张状态观测器的带宽设计方法,设观测器的带宽为ωo,该三阶LESO的期望特征方程为:
(11)
比较系数可得到观测器增益向量为:
(12)

(13)
这种方法将FSM 的模型信息引入观测器设计过程中,显然能降低系统的不确定性。采用这种LESO设计的FSM通用自抗扰控制器的原理框图如图3所示。其中,跟踪微分器(Tracking Differentiator,TD)用于对位置指令进行缓变处理,以减小或消除系统超调。
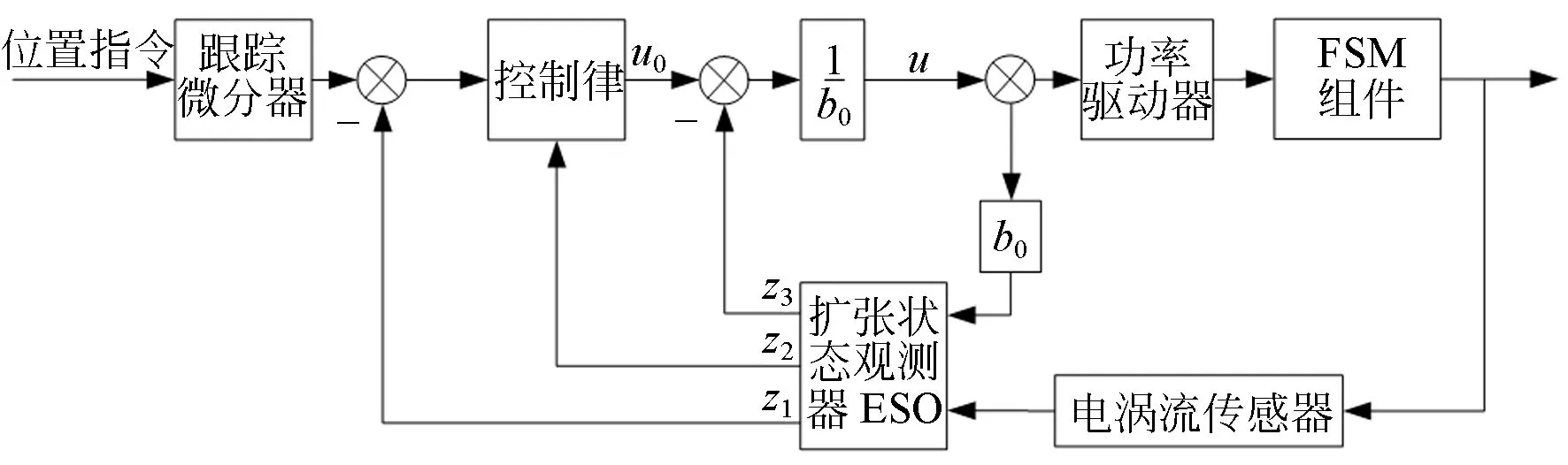
图3 FSM通用自抗扰控制器Fig.3 General ADRC of FSM
3.2 FSM降阶扩张状态观测器设计
上述针对FSM设计的三阶LESO,其特点是将电涡流传感器的测量值作为LESO的输入,而误差反馈采用了LESO输出的一阶量z1。这是一种全阶状态观测器,其优点是LESO对输出信号具有滤波的效果,可以降低测量噪声对系统性能的影响,但不可避免地将滞后引入到传感器的直接测量结果中。
降阶观测器的基本思想是若系统的部分状态变量已知或可由传感器直接测量得到,则该状态变量不需要观测估计。如果各阶状态变量可导,就只需要针对其他未知的状态变量进行估计。控制工程上对全阶和降阶观测器的优缺点没有明确的理论比较,通常认为降阶观测器具有实现简单的优点,但对噪声的抑制能力略弱于全阶观测器。
对FSM系统而言,系统输出指FSM的位置,其值由电涡流传感器直接测量得到,不需要对该状态进行估计,因此可在上述全阶LESO的基础上设计降阶LESO(Reduced Order LESO,RESO),去除不需要观测的传感器测量值y后,LESO变为一个二阶扩张状态观测器,这一过程实际上是先扩张系统状态再降低观测器阶次的过程。
对于降阶后的观测器,其观测对象形式如下:
(14)
降阶后的系统状态变量x1为传感器输出信号的微分,扩张状态x2代表了系统未知的模型信息与外部扰动总和,其矩阵形式为:
(15)

对于降阶后的对象,降阶扩张状态观测器形式[21]为:
(16)
误差传递矩阵可写为:

λ(s)=s2+(β1+2ζωn)s+β2.
(17)
同样可根据ESO的带宽设计方法,设观测器的带宽为ωo,该二阶RESO的期望特征方程可以写成:
(18)
比较系数可得到观测器增益向量如下:
(19)
对于这种形式的RESO,z1是电涡流传感器输出y的微分估计值,z2是f的估计值,其具体实现形式为:
(20)
显然,RESO的工程设计实现更加简洁,运算量更小。RESO实现的重要前提是需要求取输出y的微分作为RESO的输入值。工程实现时,一般可以采取对前后采样周期输出的y值进行差分的方式,但由于系统采样周期很小,这种差分无疑会给系统引入较大的微分噪声。因此,本文采用在反馈通道设计跟踪微分器求取输出y的微分作为RESO的输入。跟踪微分器对微分噪声的抑制效果明显优于简单差分方法[16]。采用这种RESO设计的FSM降阶自抗扰控制器(RLADRC)的原理框图如图4所示。
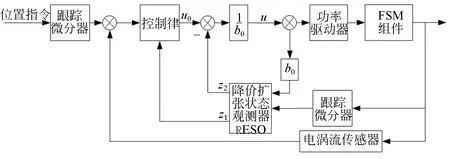
图4 FSM降阶自抗扰控制器Fig.4 Reduced order ADRC of FSM
3.3 FSM控制律设计
控制工程中,除了那些不允许系统产生振荡响应的系统外,通常都希望系统具有适当阻尼。因此,对于FSM这类阻尼过小的系统应设法适当增大其阻尼。为降低系统阻尼,采用适当的超前控制和微分控制等方式是很必要的手段。
在自抗扰控制设计过程中,对于可以简化为二阶积分器串联型系统的对象,根据控制器的带宽参数化设计方法,一般可以采用PD控制器实现控制。本文也同样采用带宽设计方法来实现对FSM的控制。
对于典型的单位二阶欠阻尼系统,其标准型为:
(21)
设控制器带宽为ωc,期望的闭环传递函数为:
(22)
将式(22)进行如下改写:
(23)
求解式(23)可得:
(2ωc-2ζ)y(s)s+y(s),
(24)
(25)
这显然是一个PD控制算法的形式,可以写为:
(26)
而式(1)的FSM的实际模型可以改写为:
(27)
因此,相比标准型,实际模型实际上是对标准模型进行增益和频率尺度化处理后的结果。从式(27)可知,相比于标准型,实际模型的比例尺度系数为K,频率尺度系数为ωn。考虑到标准型与实际模型的尺度系数,实际采用的PD控制算法为:
(28)
(29)
对于FSM降阶自抗扰控制器RLADRC,z1是电涡流传感器输出y的微分估计值,z2是f的估计值。加入扰动补偿量后,实际的控制量设计为如下形式:
(30)
其中:b0称为扰动补偿因子,其物理意义为音圈电机的力系数与FSM惯量之比。虽存在理论值,但实际是算法中需要调整的参数。
4 实验结果及分析
以FSM作为实验对象,采用TMS320 F28335型DSP作为处理器,选用非接触式电涡流传感器作为FSM位置测量传感器,系统的控制原理框图如图5所示。电涡流传感器的分辨率约为0.12 μm,输出为模拟信号。DSP通过A/D转换器采集传感器数据,通过D/A转换器输出音圈电机控制信号至线性驱动电路,给两只电机的控制电压相等,方向相反,以达到差动推拉效果。为提高FSM性能,应尽可能采用更高的采样频率。本系统采用5 kHz采样频率,采样周期为0.000 2 s。在每个采样周期内,均需完成传感器数据采集和控制算法运算等。
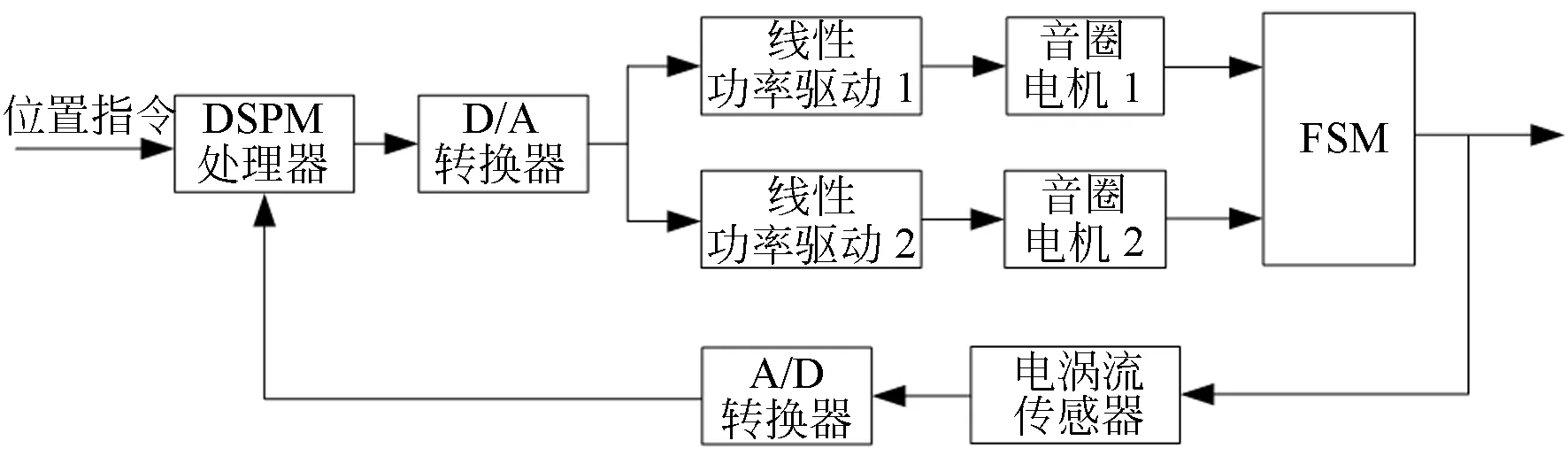
图5 FSM控制原理图Fig.5 Control schematic of FSM
对FSM的功率驱动而言,工程上通常的调制方式有脉冲宽度调制(Pulse Width Modulation,PWM)驱动和线性驱动两种驱动形式。相比PWM驱动,线性驱动具有对外辐射干扰小、控制精度高的特点。因此,本文选用线性功率驱动方式来驱动FSM的音圈电机。
FSM模型中开环增益、阻尼和自然频率等参数已知。根据以上LADRC和RLADRC控制器设计结果,控制器需要整定的参数包括控制器带宽ωc、观测器带宽ωo、微分调整因子ξ和扰动补偿因子b0。已知模型参数与需实际整定参数结果见表1。此外,对位置指令进行处理的TD快速因子取为180 000。而对于RLADRC中用于提取输出微分信号的TD,其目的是尽可能快地跟踪输出信号并提取其微分,因此其快速因子取值应尽可能大,以避免产生信号滞后,文中该参数取为10 000 000。
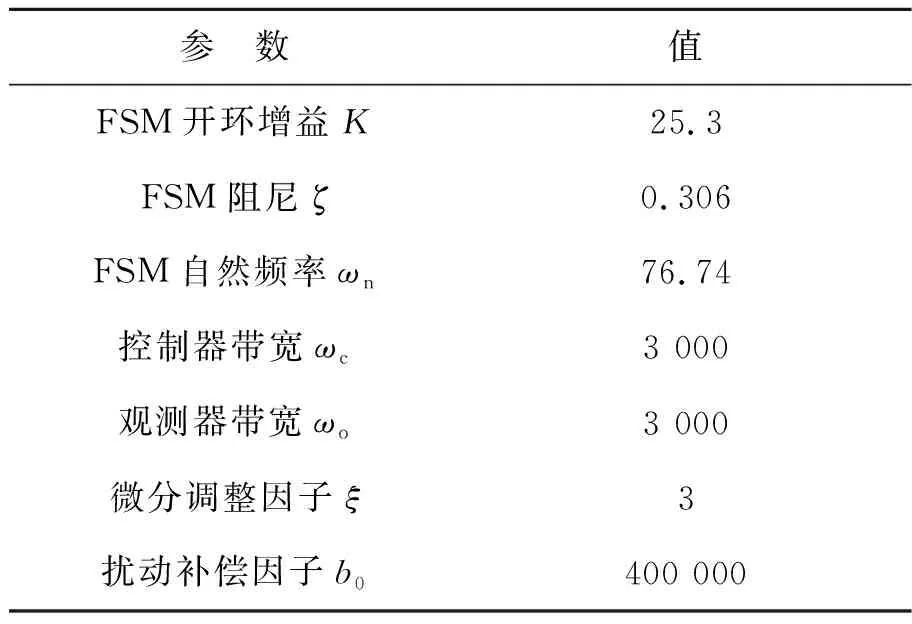
表1 FSM自抗扰控制器参数
FSM在航空光电载荷中主要用于进行快速像移补偿。工作过程中,其典型输入包括阶跃输入和斜坡输入。其中,阶跃输入一般用于FSM补偿结束后快速回到初始位置;斜坡输入为FSM的补偿指令输入,一般通过对安装于载荷的惯性速率敏感元件(如光纤陀螺)输出进行积分获取。
4.1 FSM的阶跃响应
FSM的阶跃响应是衡量其性能的重要指标。在行程范围内,更快的阶跃响应、更稳定的动态过程是FSM控制的目标。对于本文的FSM组件,设计行程为±1°。输入0.8°阶跃,分别采用通用LADRC和RLADRC方法,获得的阶跃响应曲线如图6所示,阶跃响应过程中LESO和RESO估计的系统等效总扰动如图7所示。
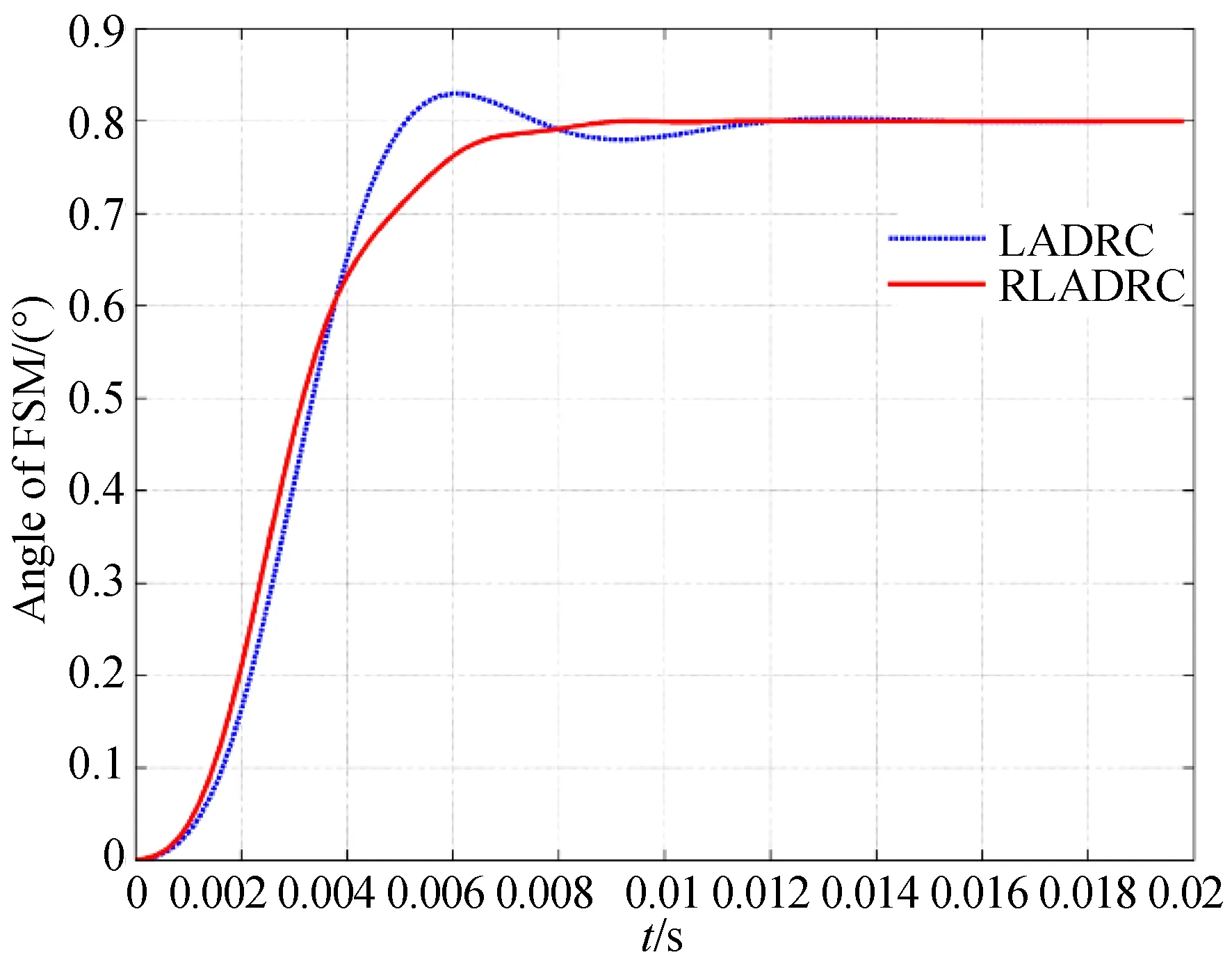
图6 FSM阶跃响应曲线Fig.6 Step response curves of FSM
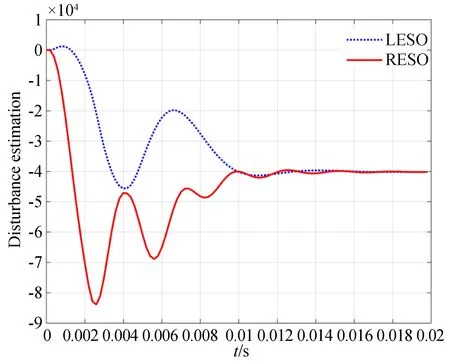
图7 阶跃响应LESO和RESO的扰动估计值Fig.7 Disturbance estimation of LESO and RESO in step response
从位置阶跃响应曲线来看,RLADRC的动态过程明显优于LADRC。LADRC经历一次振荡过程且产生了1.5%的超调;RLADRC过渡过程平稳无振荡且无超调。从稳态时间看,以±0.003°误差带为标准,过渡过程耗时分别为11.7 ms和9.2 ms,RLADRC达到稳态的时间提升了约21%。两种方法能达到的位置稳定精度基本一致,均优于0.001°。
4.2 FSM的斜坡响应
航空光电载荷在扫描成像过程中,一般由大惯量框架或镜筒带动光学系统进行速度扫描,图像传感器在扫描过程中进行高帧频成像。FSM在载荷工作过程中用于在成像过程中进行扫描速度补偿。以某光电载荷为例,成像过程中镜筒扫描速度为6 (°)/s,光学系统无焦光路放大倍数为10,FSM补偿速度应为30 (°)/s。由于FSM工作于位置系统,实际系统中需要采集镜筒陀螺的速度并进行积分获得角位置指令信号,是典型的斜坡输入信号。实验过程中,采用每个采样周期角位置指令增加0.006°的方法实现30 (°)/s的斜坡指令输入。LADRC和RLADRC对斜坡指令的跟踪曲线如图8所示。斜坡响应过程中LESO和RESO估计的系统等效总扰动如图9所示。
图10为FSM对斜坡位置输入的跟踪误差曲线。从斜坡响应误差曲线看,达到稳态后,RLADRC对位置斜坡输入的跟踪误差由0.042°降低至0.037°。
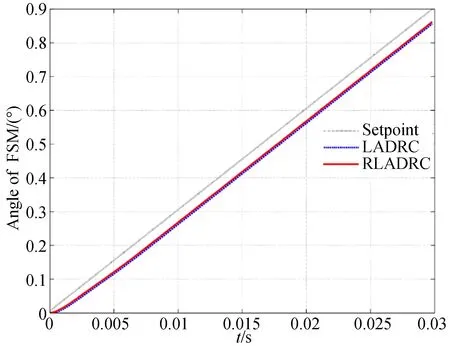
图8 FSM斜坡响应曲线Fig.8 Ramp response curves of FSM
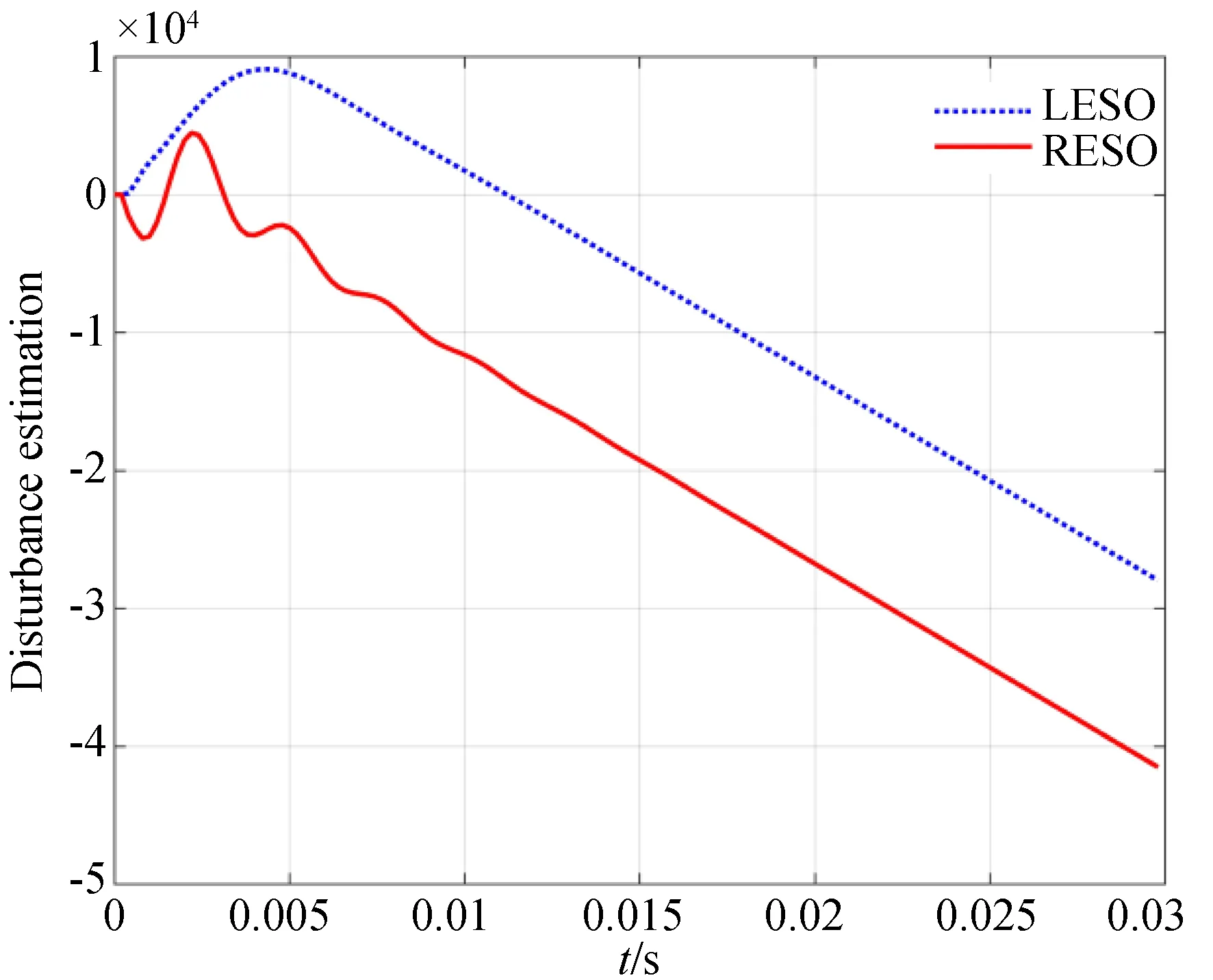
图9 斜坡响应LESO和RESO的扰动估计值Fig.9 Disturbance estimation of LESO and RESO in ramp response
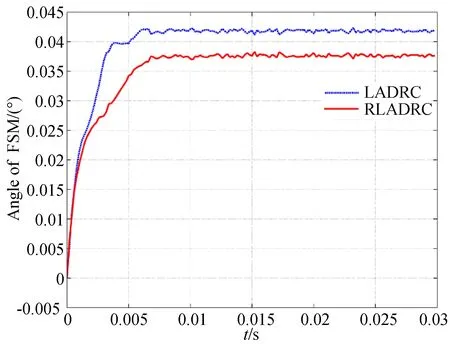
图10 FSM斜坡响应位置误差曲线Fig.10 Position error curves of FSM ramp response
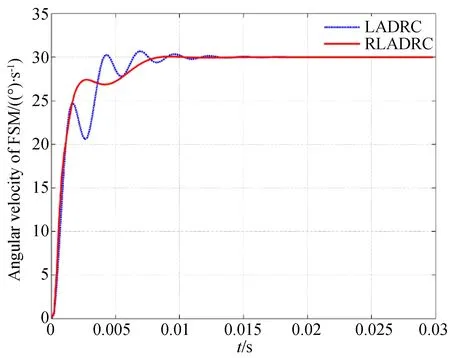
图11 FSM斜坡响应速度曲线Fig.11 Speed curves of FSM ramp response
为获得FSM实际的速度曲线,在FSM位置输出端设计跟踪微分器,其输出结果中包含了输入位置信号的微分,即FSM的角速度。LADRC和RLADRC在位置斜坡响应过程中的速度曲线如图11所示。从动态过程看,RLADRC动态过程优于LADRC,平稳无振荡,LADRC的动态过程存在多次小幅值振荡。
FSM以20 Hz帧频进行像移速度补偿及位置回位的连续工作曲线见图12。帧周期为50 ms,FSM在第30 ms启动速度补偿,要求10 ms稳速,第40~50 ms为曝光成像时间。以1%稳速精度作为要求,LADRC的稳速时间为7.8 ms,RLADRC的稳速时间为10.2 ms,稳速时间提升约24%。
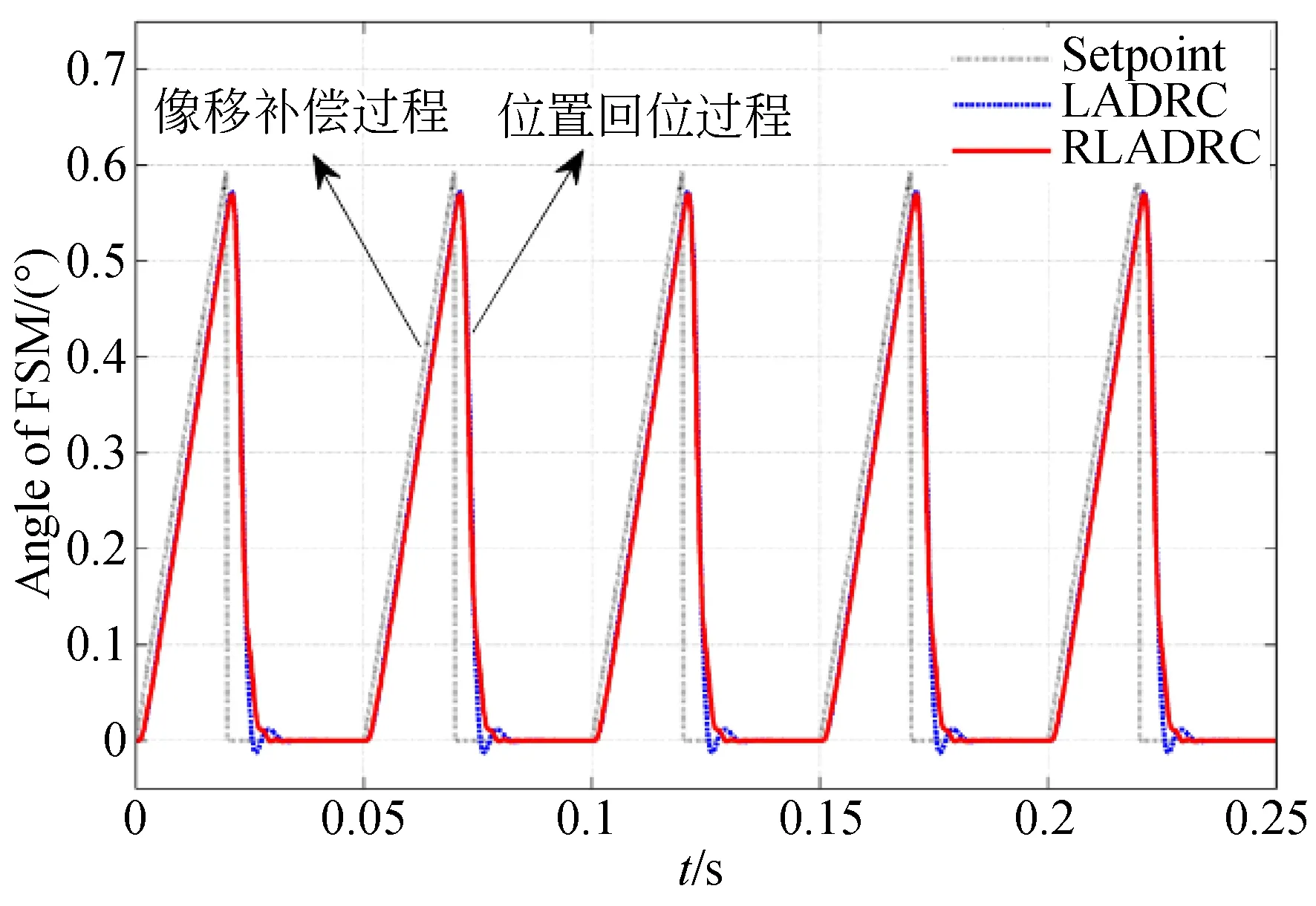
图12 FSM连续工作曲线Fig.12 Continuous working curves of FSM
5 结 论
为实现一种音圈致动的快速反射镜的控制,本文对FSM模型进行了分析简化并获取了模型参数。根据自抗扰控制理论,设计了FSM的三阶通用LESO。将电涡流传感器测量结果视为已知,提出了降阶扩张状态观测器及其对应的自抗扰控制器设计方法。根据控制器带宽设计思想,对于FSM 这类二阶欠阻尼对象,采用PD控制策略能够实现其控制目标。实验结果表明,降阶自抗扰控制能明显改善FSM的位置阶跃响应动态性能,能实现无超调与振荡的阶跃响应,稳态时间由11.7 ms提升至9.2 ms。同时,能够降低FSM对位置斜坡输入跟踪的稳态误差并改善其速度曲线动态过程,像移补偿稳速时间由10.2 ms提升至7.8 ms,提升约24%。FSM降阶自抗扰控制具有实现简单、运算量小的优点,能够明显提升FSM的动态性能。
猜你喜欢
数学物理学报(2021年2期)2021-06-09
数学物理学报(2021年2期)2021-06-09
数学年刊A辑(中文版)(2021年4期)2021-02-12
应用数学(2020年4期)2020-12-28
应用数学(2020年4期)2020-12-28
数学物理学报(2019年5期)2019-11-29
天津教育·下(2018年9期)2018-07-13
自动化仪表(2017年8期)2017-08-30
空间控制技术与应用(2015年2期)2015-06-05
航空学报(2015年4期)2015-05-07