红外双波段双视场成像告警系统设计
2020-07-07 02:52张洪伟丁亚林马迎军陈卫宁
光学精密工程 2020年6期
张洪伟,丁亚林,马迎军,陈卫宁
(1.中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院大学,北京 100049;3.中国科学院 西安光学精密机械研究所,陕西 西安 710119)
1 引 言
红外光学成像探测系统在复杂环境下具有目标探测精度高、虚警率低、可实现全天时探测等优势,在遥感、导航以及导引等领域得到广泛的应用。由于飞行器尾焰,飞行器、坦克等发动机喷出的高温气体在3~5 μm波段有较强的辐射;而飞行器、坦克等设备本体在8~12 μm波段有较强的辐射,因此利用中波/长波红外双波段复合探测系统可有效提高复杂环境下目标探测精度。然而,随着飞行器、机动器等目标的机动性能、隐蔽性能的不断提高,常规的定焦红外系统难以实现对来袭目标的有效探测及跟瞄,需要一种双视场变焦成像系统,大/小视场协同作业便可实现对目标的大视场搜索及小视场跟踪监视[1-4]。同时,为保证大/小视场切换过程中目标不丢失,光学系统需要快速切换,且切换后系统需要保持较高的光轴稳定精度。因此,红外双波段双视场探测技术是一个亟待研究的课题。
近年来,国内外陆续报道了许多关于红外成像探测系统的研究方法与成果,但是为了满足总体包络尺寸以及重量要求,多采用单色定焦透射或反射光学结构形式,难以满足复杂环境下目标探测的需求。尽管有些双视场光学系统设计,但大多采用电机驱动凸轮进行变焦,其轴向尺寸大,变倍速度慢,也无法满足实际使用要求。本文设计了中波/长波双波段红外成像系统。根据系统体积重量以及实际探测需求,中波红外分系统采取定焦结构,长波红外分系统采取光学元件切入/切出形式的双视场变焦结构。长波红外分系统采用旋转电磁铁为驱动元件实现了大于80 ms快速变焦,且大/小视场切换后光轴晃动小于两个像素。由于光学成像系统工作环境恶劣,需要承受-40~60 ℃大动态范围的温度变化,在无调焦光学系统中需要进行无热化设计以保证成像质量。该系统具有结构紧凑、视场大、长波红外分系统大/小视场切换速度快、光轴稳定性高及成像质量好等优点。
2 总体设计
根据总体指标对整机的体积包络、质量的要求,本文设计的中波/长波双波段红外成像告警系统中的中波与长波红外分系统采取共用窗口与分光镜的结构形式,进入窗口的光能量在分光镜处进行分光,分别进入中波与长波红外分系统,完成对目标的双波段复合探测[5-9]。
2.1 红外成像系统组成
中波/长波双波段红外成像告警系统主要由窗口共形组件、分光镜组件、中波红外镜组组件、中波制冷型红外探测器及成像电路组件、长波红外镜组组件、变倍组件、长波制冷型红外探测器及成像电路组件、底板等组成,红外成像系统组成如图1所示。其中,变倍组件需要能够满足80 ms快速切换稳定、大/小视场切换后光轴晃动小于两个像素的指标要求。
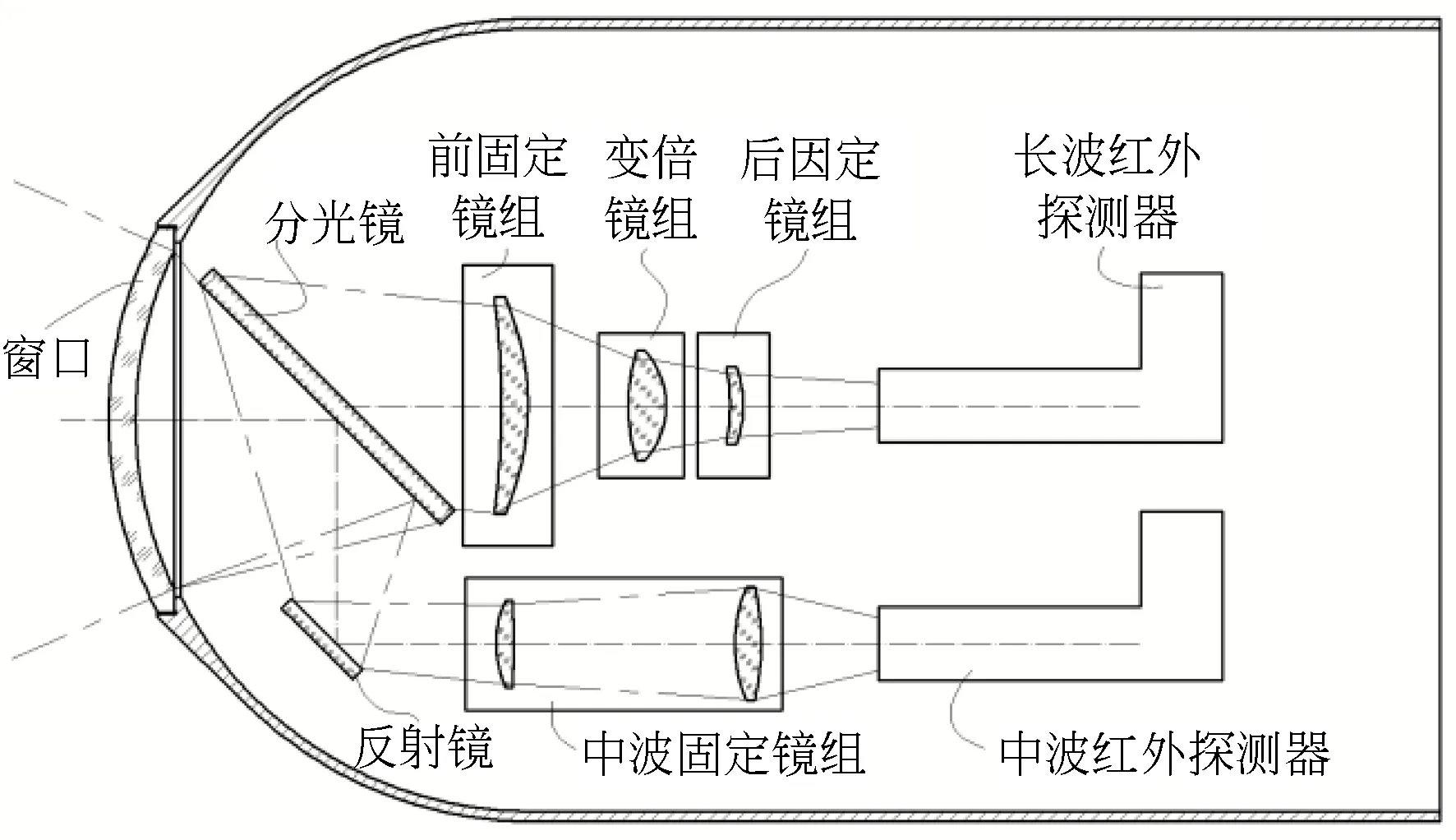
图1 红外成像系统组成示意图Fig.1 Schematic diagram of infrared imaging system
2.2 变倍结构形式选择
双视场红外成像光学系统中大/小视场的切换形式有多种,目前常用的有以下两种切换形式:一种是通过轴向移动变倍及补偿镜组来改变系统焦距以实现大/小视场的切换,采用这种变倍形式切换速度较慢、结构较为复杂,并且参与成像的镜片数量多,对光学系统透过率以及成像质量有一定的影响,如图2(a)所示;另一种是通过径向切入/切出变倍镜组来改变系统焦距以实现视场切换,采用这种径向变倍形式不需要轴向预留镜组移动空间从而有利于系统小型化,仅需保证变倍镜组切入光路的复位精度便能确保光学系统长短焦光轴的一致性,并且采用适当的驱动组件便能实现大/小视场的快速切换,如图2(b)所示。因此,本文采用径向切换方式进行长波红外分系统的设计。
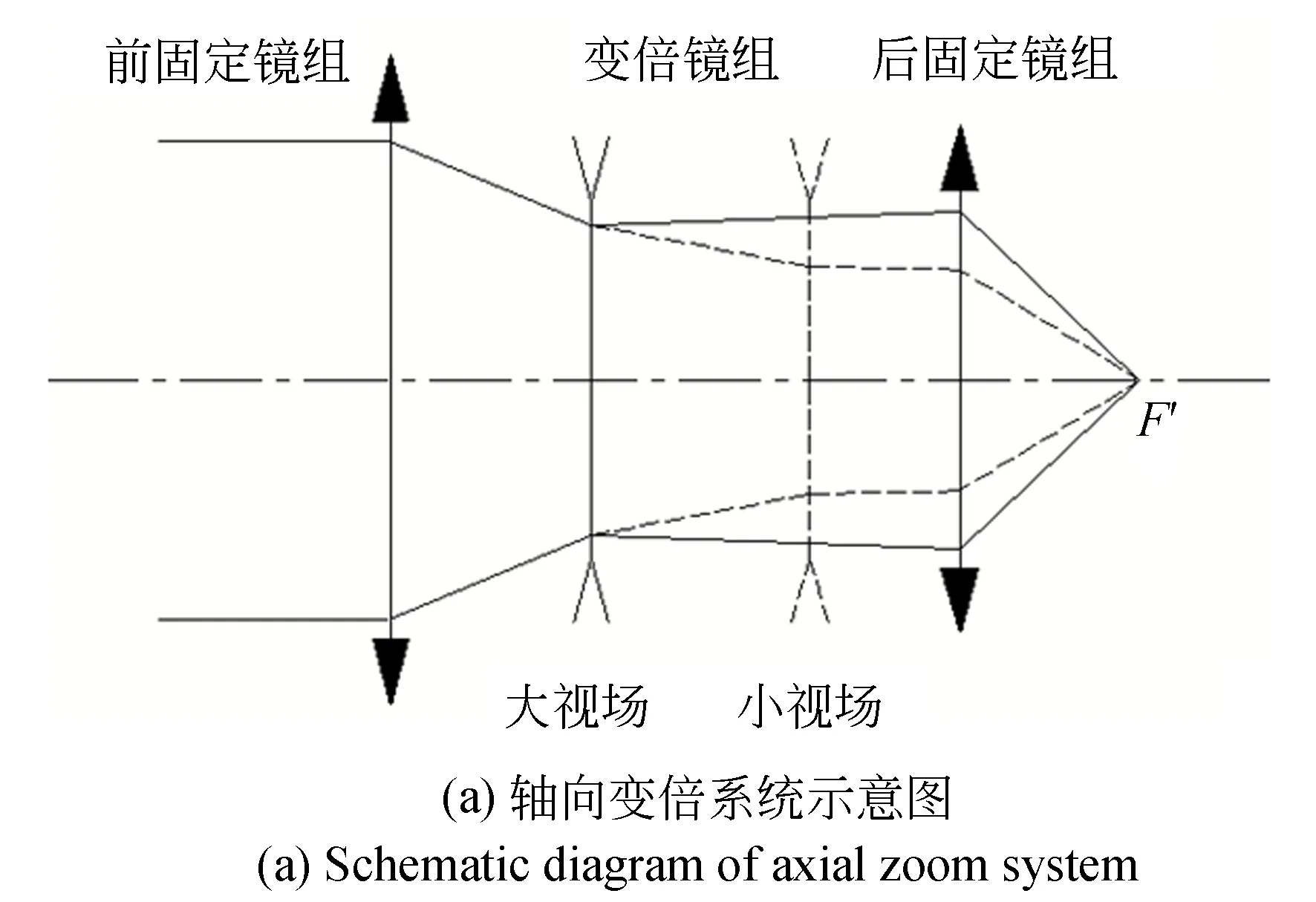
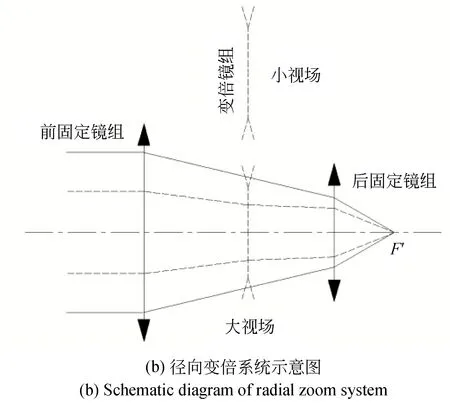
图2 双视场变倍系统结构Fig.2 Structure of zoom system with dual-FOVs
3 光学系统设计
3.1 参数及构型设计
成像光学系统的主要参数包括焦距、相对口径和视场角等[10-11]。受衍射极限的限制,成像光学系统的最小分辨率往往取决于系统的相对口径。本文中波与长波光学系统均采用制冷型640×512面阵探测器,像元尺寸为15 μm。综合考虑红外成像告警系统的包络尺寸、质量和探测性能等因素,光学系统参数如表1所示。
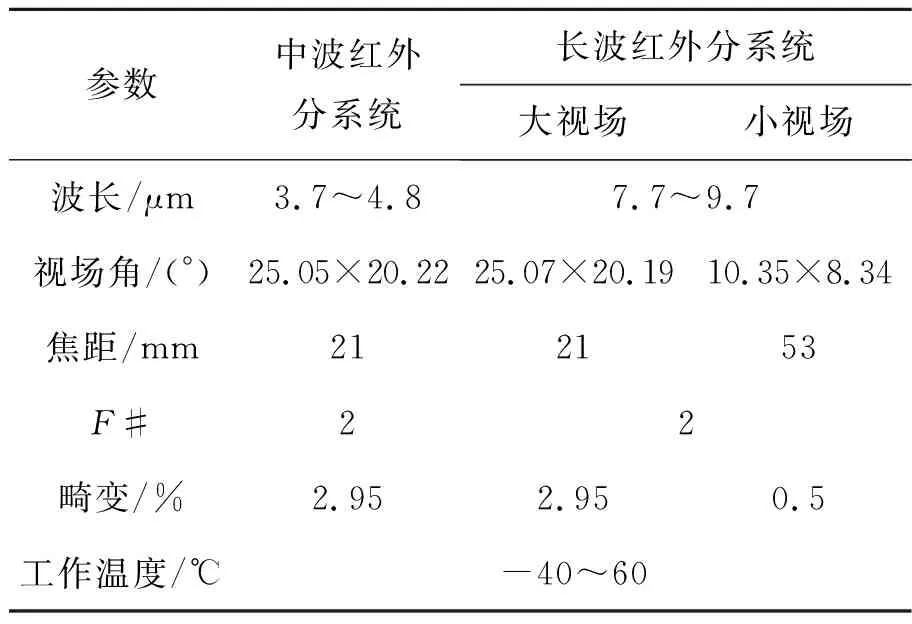
表1 红外成像光学系统参数

fn=fw×k.
(1)
长波红外分系统在大视场工况下变倍镜组的物像距公式为:
(2)
(3)


(4)
(5)
其中:dw_12为大视场工况下前固定镜组与变倍镜组的间隔,dw_23为大视场工况下变倍镜组与后固定镜组的间隔。
最后,再依据长波红外分系统的实际焦距进行比例缩放,缩放比为Pr。
(6)
(7)
dFw_12=dw_12×Pr,
(8)
dFw_23=dw_23×Pr,
(9)

由于中波/长波红外分系统采取共用窗口与分光镜的结构形式,为保证系统不会引入较大像差对成像质量造成较大影响,窗口两个面的曲率半径分别为120.2, 116.6 mm,其光焦度为1/13 000趋近于0,因此分光镜位于入射光路的平行光路中,不会引起较大像差。为了达到光学系统无热化设计以及消色差的目的,中波红外波段采用HW14,ZnS两种材料,长波红外波段采用ZnSe,HW14两种材料,窗口采用ZnS材料,分光镜采用Ge材料。通过加入非球面(图3)、规划光焦度等光学系统设计以及材料的选择等方法达到校正系统像差、提高光学系统成像质量的目的;通过光学材料与镜筒等结构材料的匹配达到无热化设计的目的[12-15]。
为实现光学系统的无热化设计,光学系统的光焦度、消色差以及消热差必须满足:
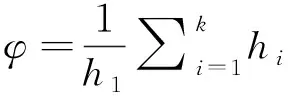
(10)
(11)
(12)
(13)
其中:φ为光学系统的光焦度,hi为第一近轴光线在透镜上的入射高度,φi为透镜光焦度,Δfc为光学系统由色散引起的光焦度变化值,ωi为透镜色散因子,ΔfT为光学系统由光学元件引起的焦距变化值,χi为归一化热差系统,agi为透镜的线膨胀系数,am为结构件的线膨胀系数,L为系统总长。
通过式(10)~式(13),可计算得到满足光学系统无热化要求的光学系统的近轴关系,然后再经过合理匹配透镜材料与结构件材料就能够得到光学系统无热化要求的光学系统的初始结构。
为减小镜片口径,中波/长波红外光学分系统均采用二次成像的形式,并且在长波红外光学系统的一次成像附近设置切入/切出变倍镜组,以实现大/小视场的切换,这样设计可减小变倍镜组口径以达到减小驱动扭矩的目的。采用CODE V光学设计软件对光学系统进行反复优化,得到最优的设计结果,如图3所示。
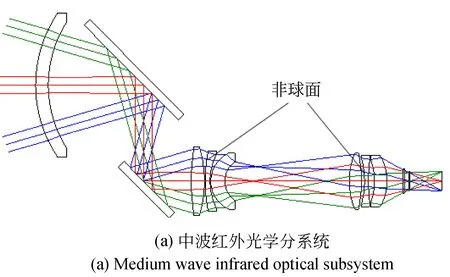
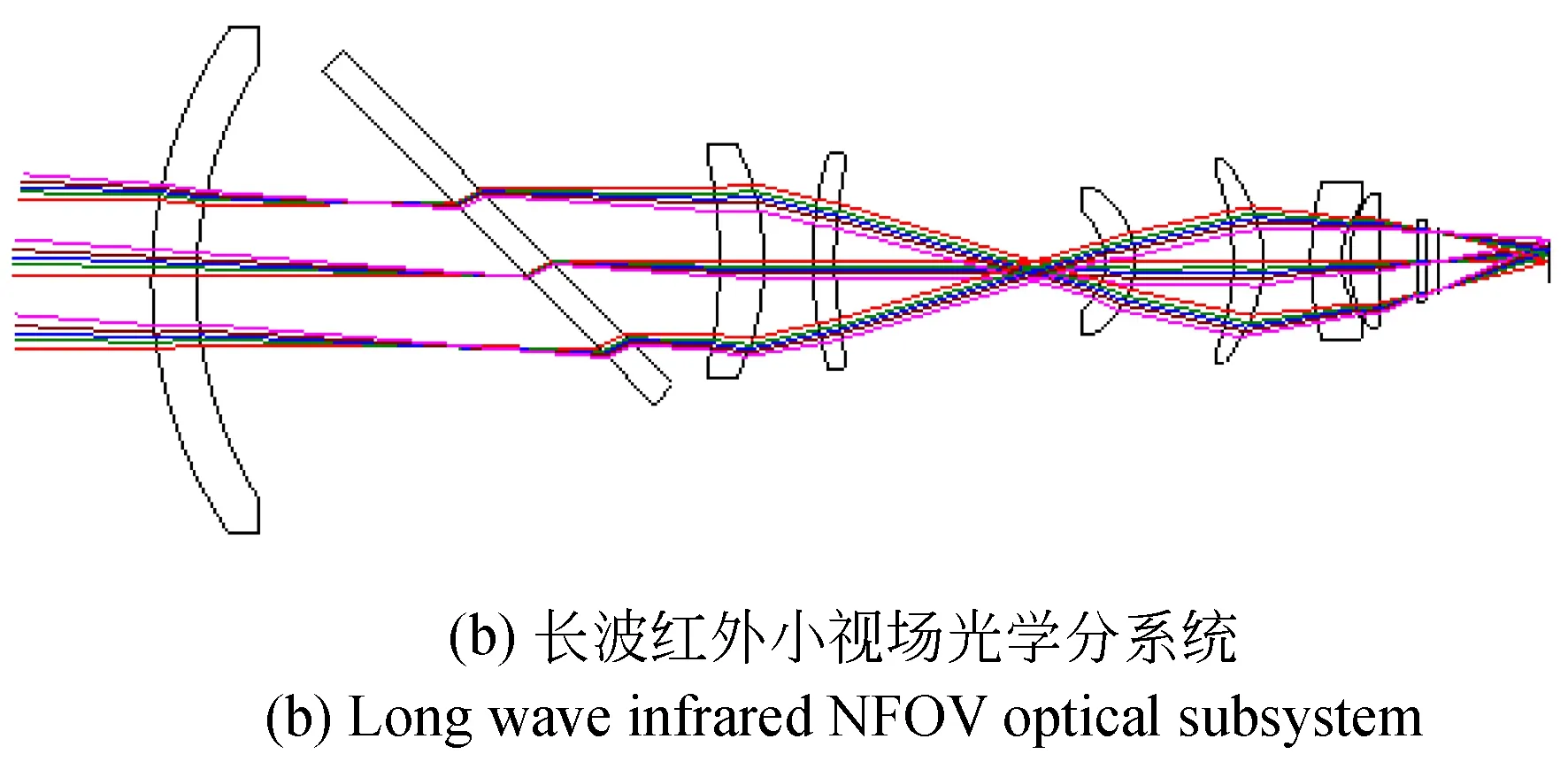
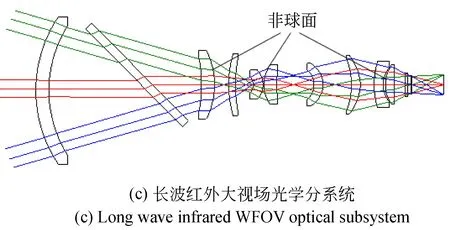
图3 成像告警光学系统Fig.3 Optical system of image early warning system
3.2 变倍驱动及限位组件
长波红外分系统的变倍镜组围绕驱动组件的回转中心转动切入/切出光路来实现分系统大/小视场的转换。驱动组件主要由驱动元件、驱动轴系等组成。其中,驱动轴系主要包括一对角接触球轴承、轴承端盖、轴承座和变倍镜组摆臂的旋转轴等。由于伺服电机的电气时间常数较大,启动较慢,因此选用旋转电磁铁作为驱动组件的驱动元件,以实现双视场的快速切换。
限位组件采取电限位、机械限位及磁力锁紧机构的组合形式。在变倍镜组切入、切出两个位置均设有一套电限位、机械限位以及磁力锁紧机构。其中,电限位采用光电开关;机械限位采用聚氨酯减震材料;磁力锁紧机构采用失电源型电磁铁与铁镍合金座组合形式,失电源型电磁铁即通电失去磁力,断电恢复磁力,因此采用失电源型电磁铁仅在视场切换过程中通电,视场切换结束后便可断电锁紧,减少系统功耗,如图4所示。
长波红外分系统初始处于大视场搜索模式,待系统发现目标,磁力锁紧机构与旋转电磁铁同时通电工作,变倍镜组瞬间切出系统光路,此时旋转电磁铁低电压保持力矩,磁力锁紧机构断电锁紧定位,系统变为长焦小视场工作模式,对目标进行瞄准跟踪。大/小视场切换速度达到80 ms以内,以确保目标在视场切换过程中不会丢失。
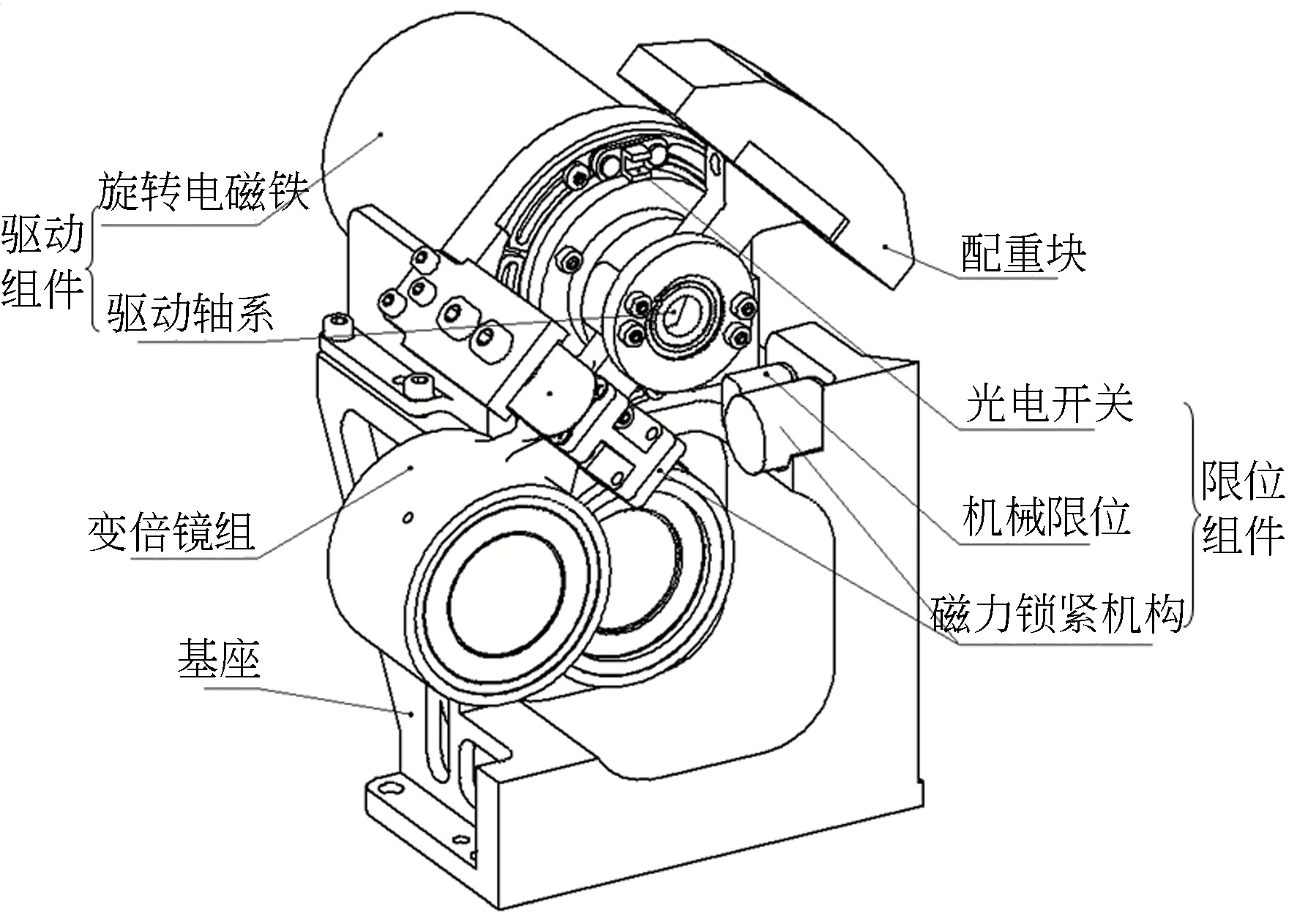
图4 变倍驱动及限位组件Fig.4 Zoom drive and limit components
3.3 像质评价
系统采用的中波/长波红外探测器均为15 μm,其特征频率为33 lp /mm。中波红外光学分系统与长波红外光学分系统大小视场在-40,0,20,60 ℃条件下的调制传递函数如图5~图7所示。从图中可以看出,各光学系统在不同温度下的调制传递函数均接近衍射极限,由此实现了红外光学系统在-40 ℃~60 ℃内的无热化设计。
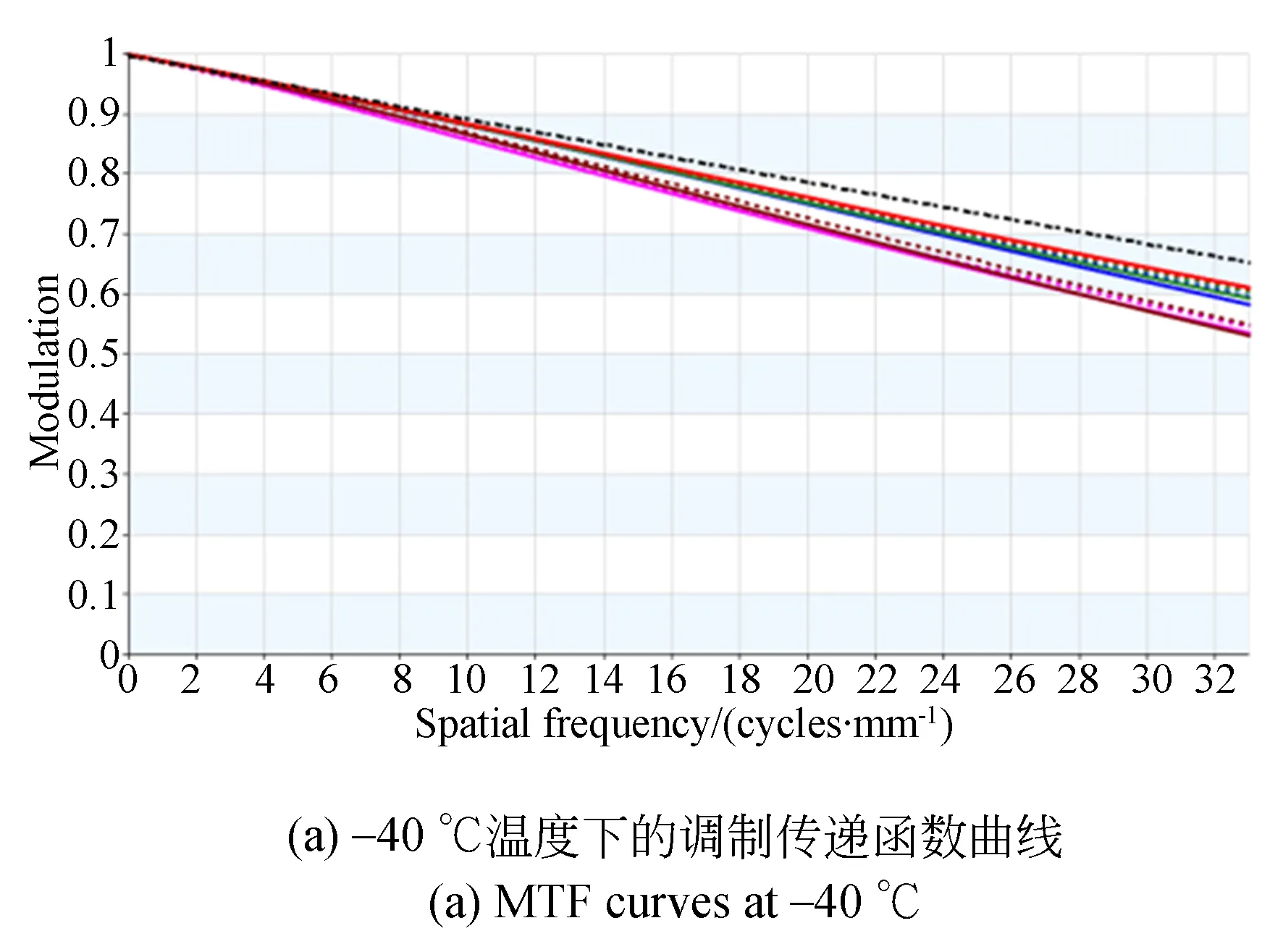
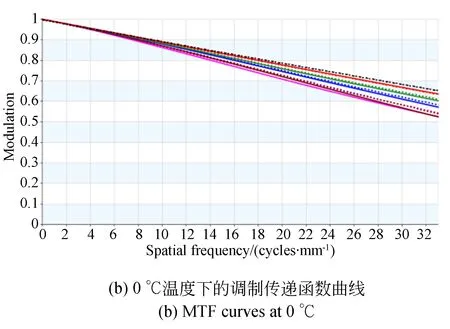

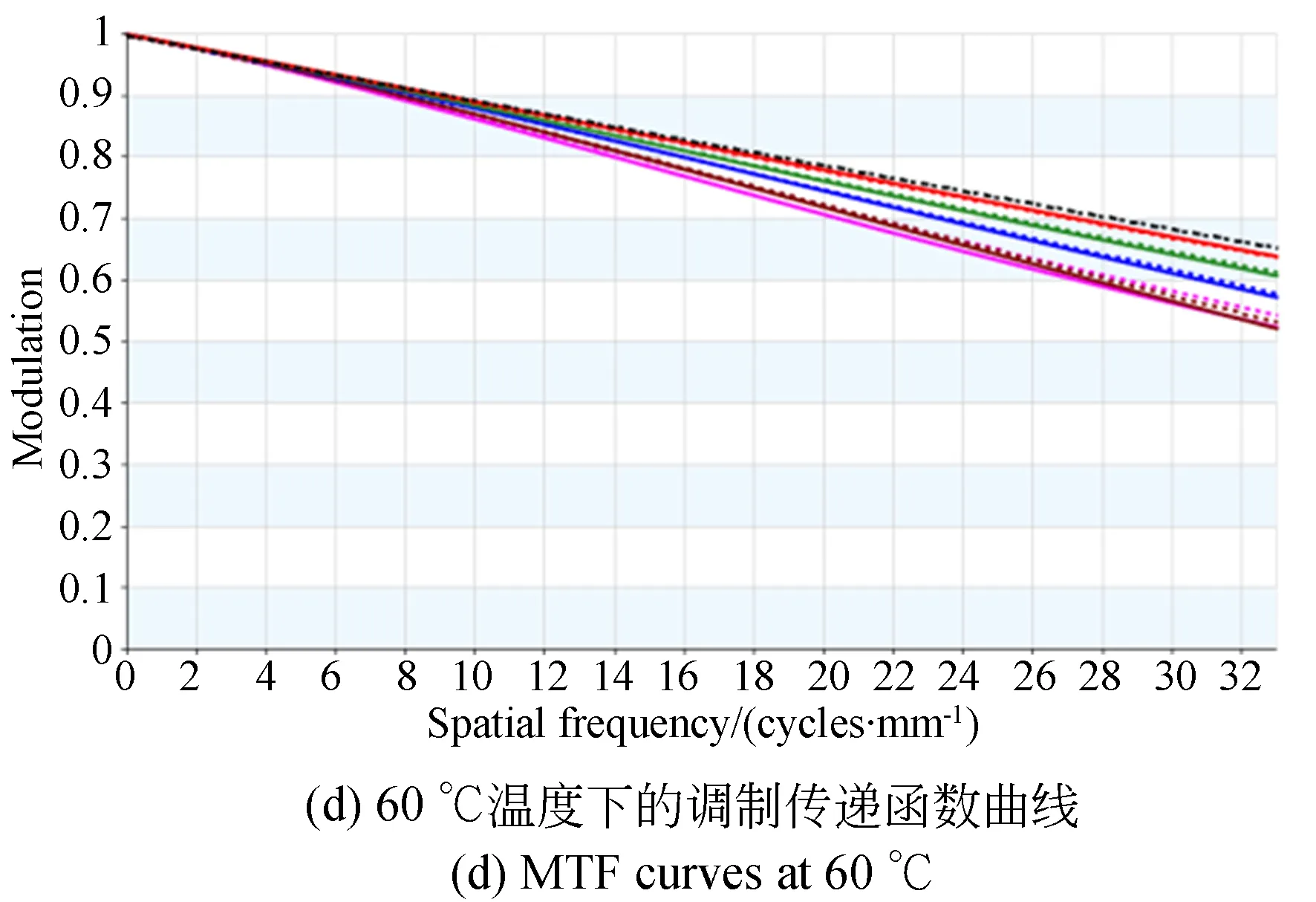
图5 中波红外光学分系统在不同温度下的调制传递函数Fig.5 MTF curves of MWIR optical subsystem at different temperatures
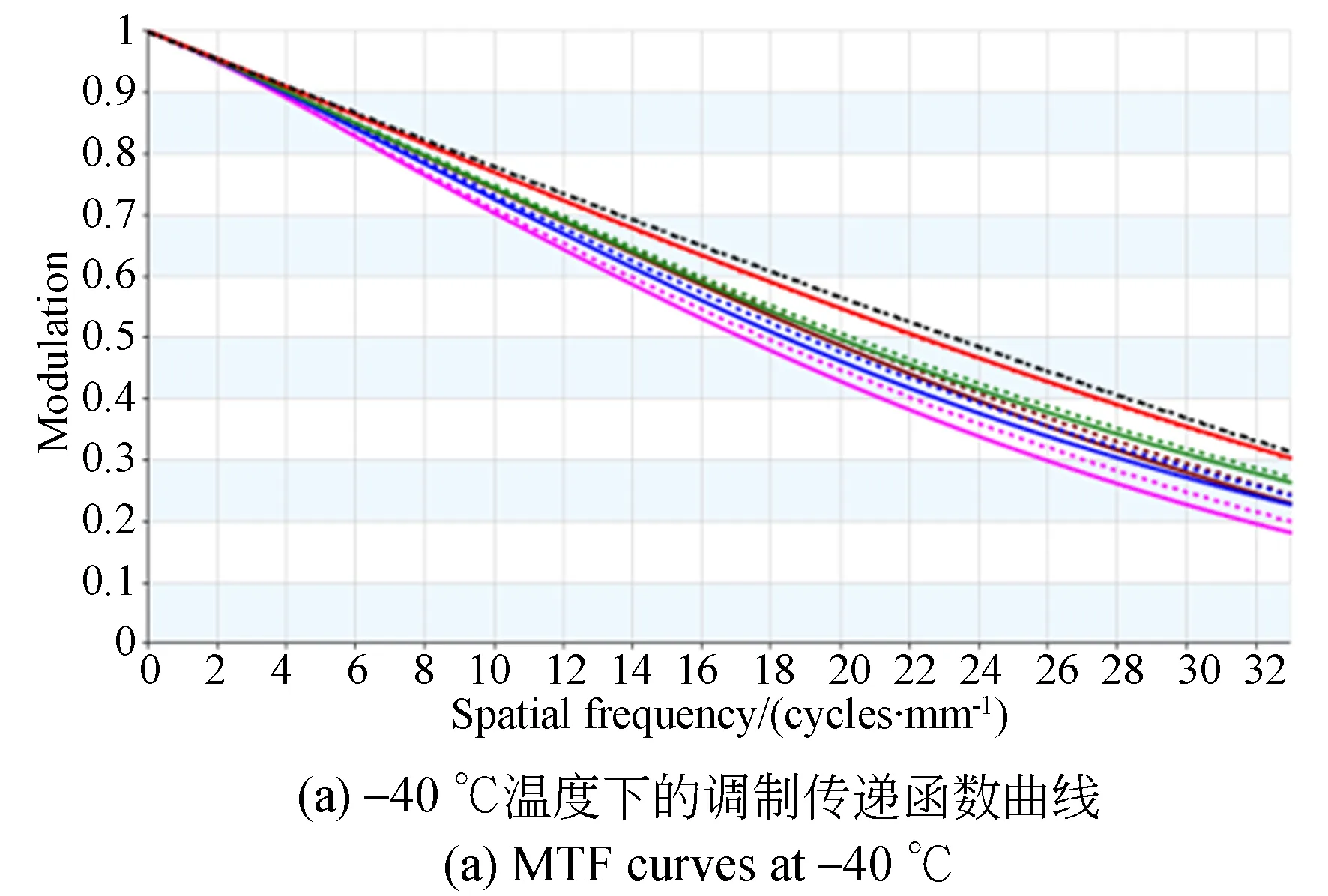
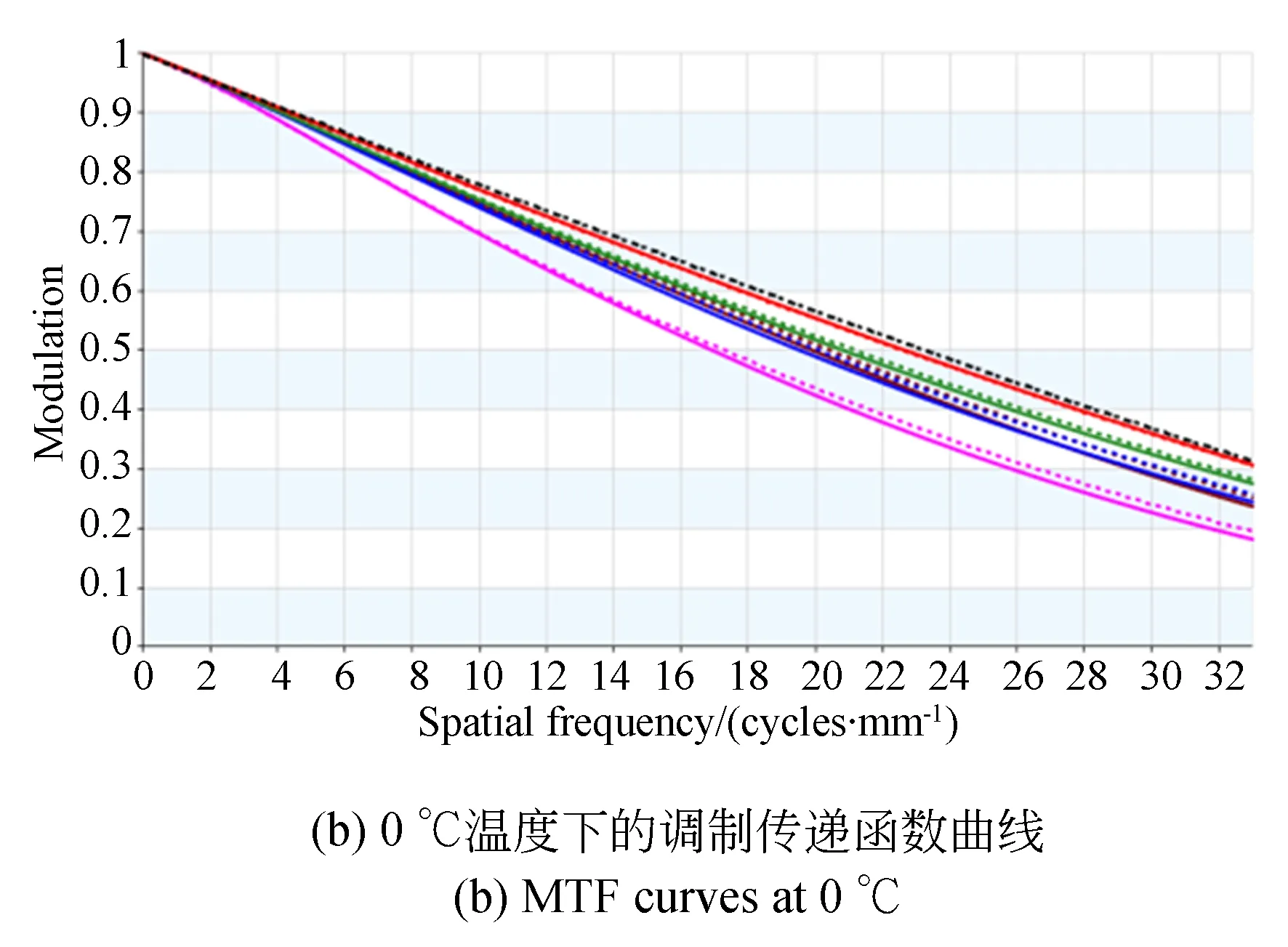
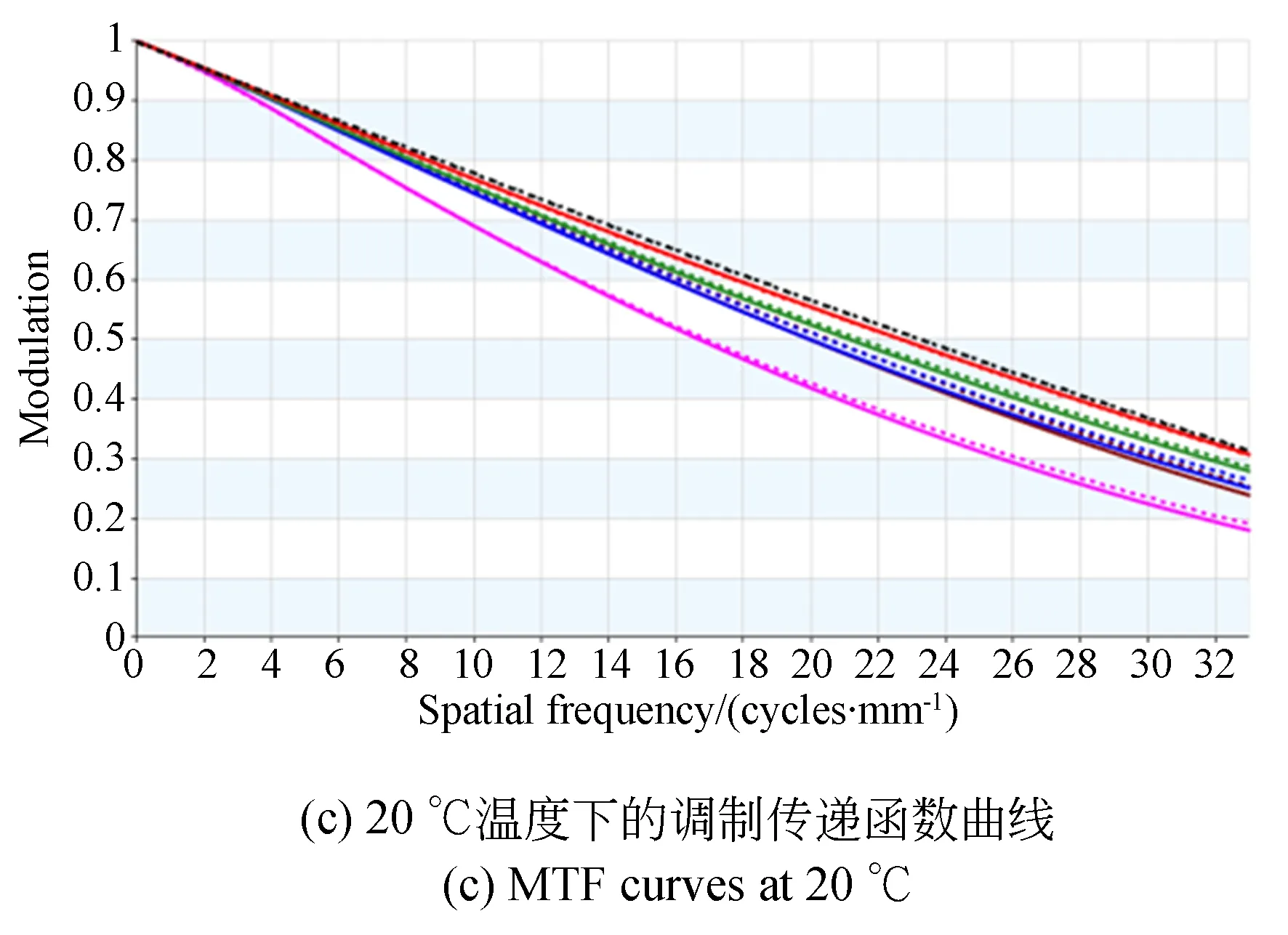
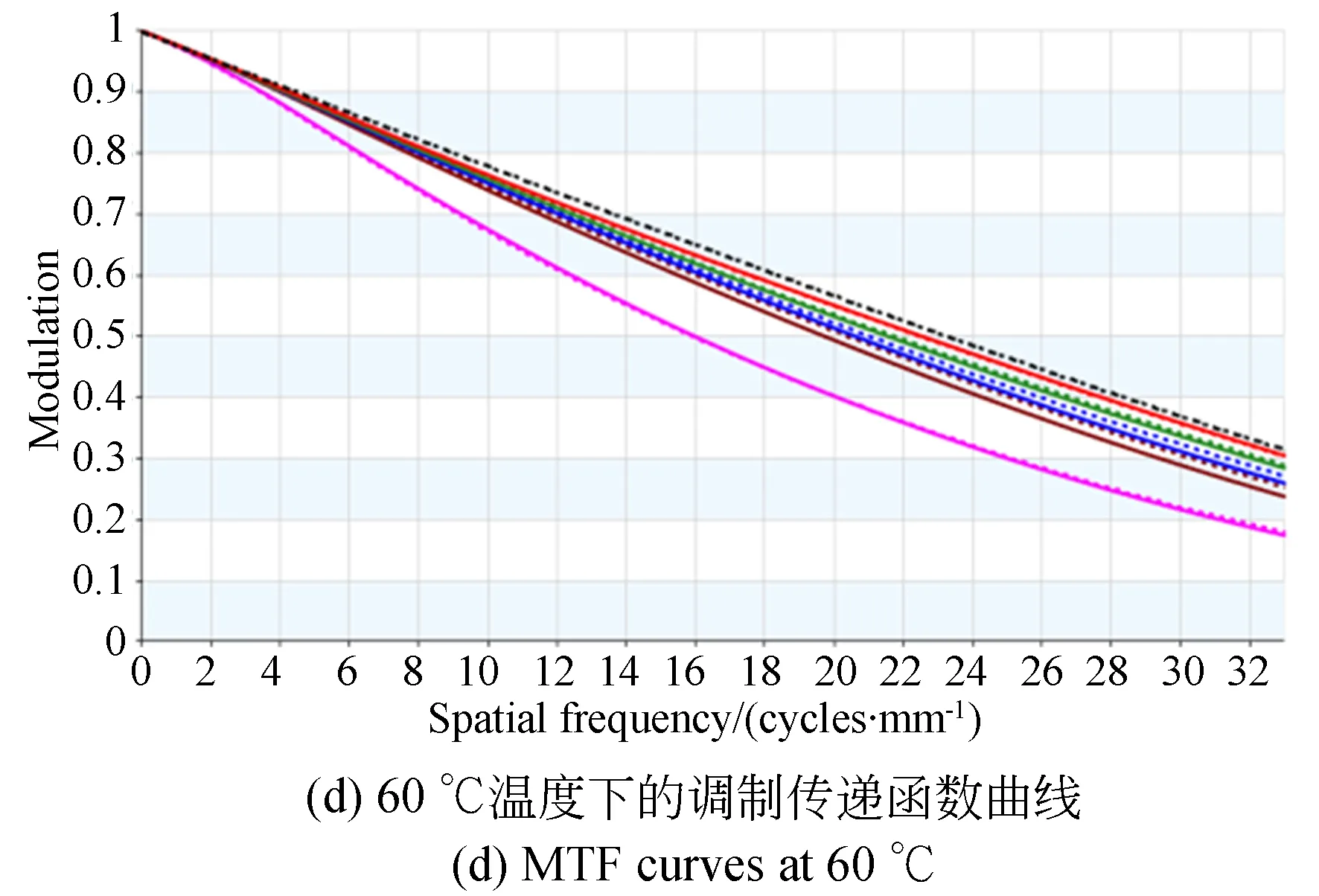
图6 长波红外光学分系统大视场不同温度下的调制传递函数Fig.6 MTF curves of LWIR-WFOV optical subsystem at different temperatures
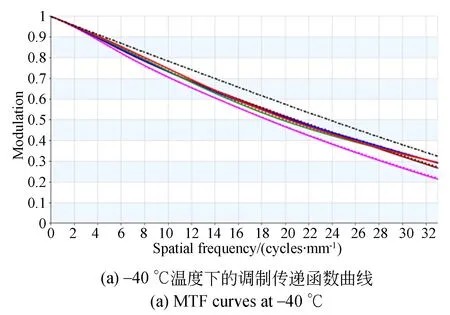
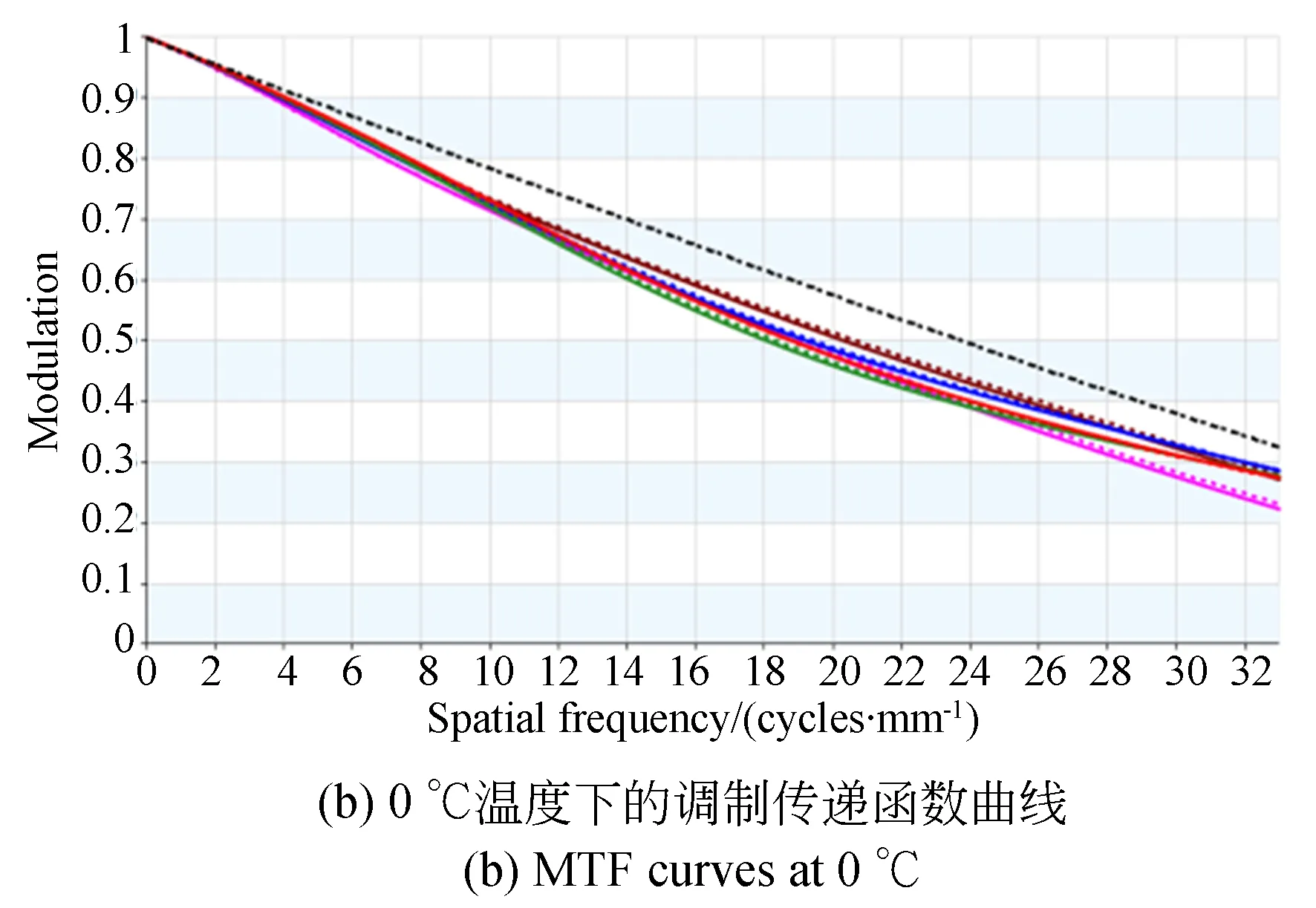
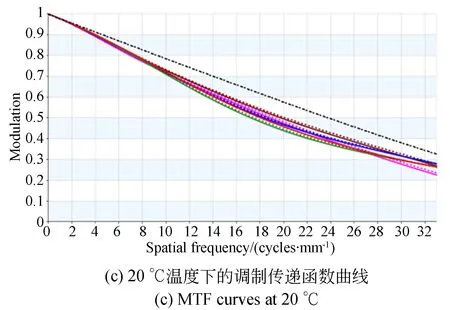
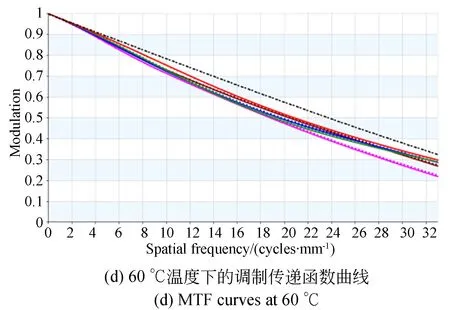
图7 长波红外光学分系统小视场不同温度下的调制传递函数Fig.7 MTF curves of LWIR-NFOV optical subsystem at different temperatures
中波红外光学分系统与长波红外光学分系统的畸变曲线分别如图8、图9所示,从图中可以看出畸变均小于3%,满足系统指标要求。
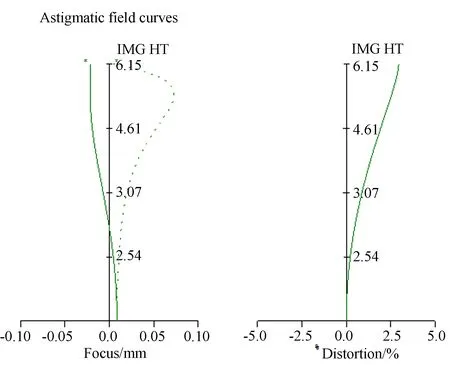
图8 中波红外光学分系统的畸变曲线Fig.8 Astigmatism and distortion curves of MWIR optical subsystem
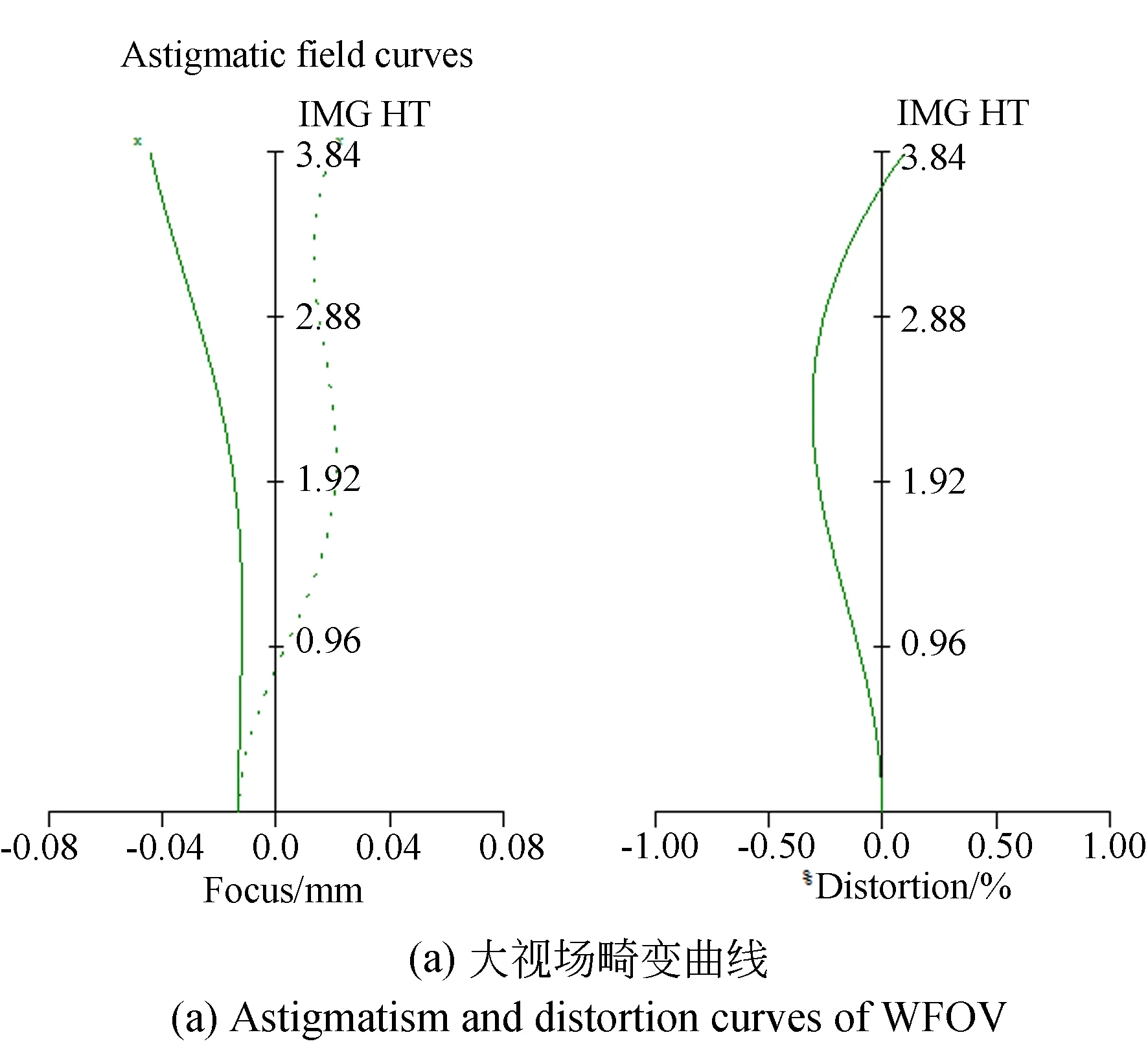
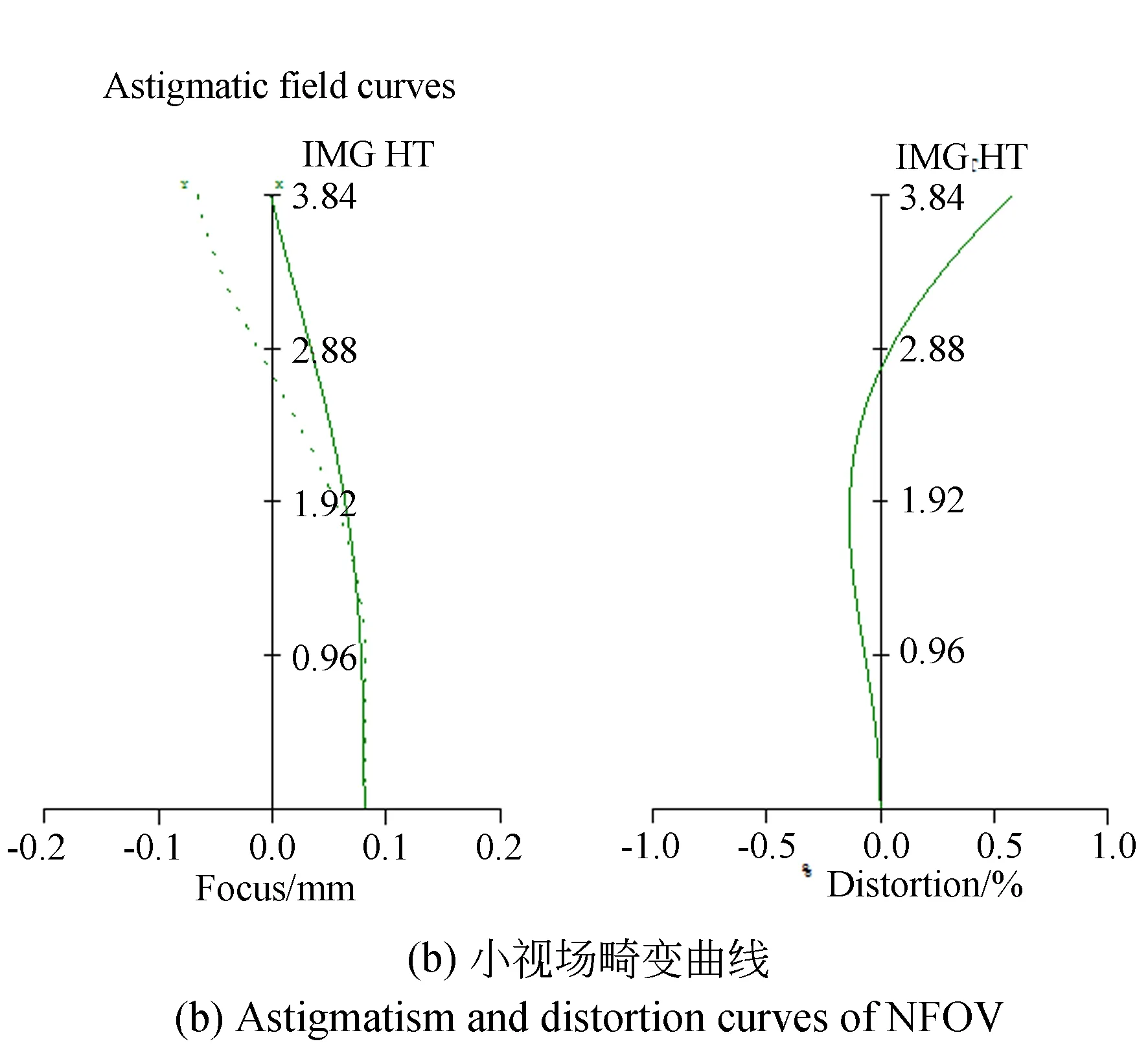
图9 长波红外光学分系统的畸变曲线Fig.9 Astigmatism and distortion curves of LWIR optical subsystem
3.4 光学系统公差分析
在光学元件的加工和装配过程中,光学系统公差会影响系统的成像质量,主要体现在传递函数上。其中,偏心、倾斜和中心厚误差等系统公差对不同视场角光线的传递函数的影响较大。为保证成像质量,须对光学系统公差加以分析,并依此作为机械结构的设计依据。
经分析,光学镜片在偏心0.01 mm、倾斜1′、中心厚误差为±0.02 mm、面型3圈以上时,中波红外分系统在33 lp/mm处全温度范围内,中心视场传递函数优于0.4的概率为90%,0.7视场传递函数优于0.4的概率为90%;长波大/小视场在33 lp/mm处全温度范围内中心视场传递函数优于0.20的概率为90%,0.7视场传递函数优于0.20的概率为85%。以目前的加工及装配能力均可满足要求。
3.5 系统光轴精度分析
3.5.1 光轴误差系统
中波红外成像系统为定焦成像系统,镜组为固定镜组;长波红外成像系统的变倍镜组切出后为长波红外成像系统的小视场,镜组为固定镜组。镜组均采用定心装配工艺进行装配,故中波及长波红外成像系统的小视场光轴重复精度均小于1个像素。
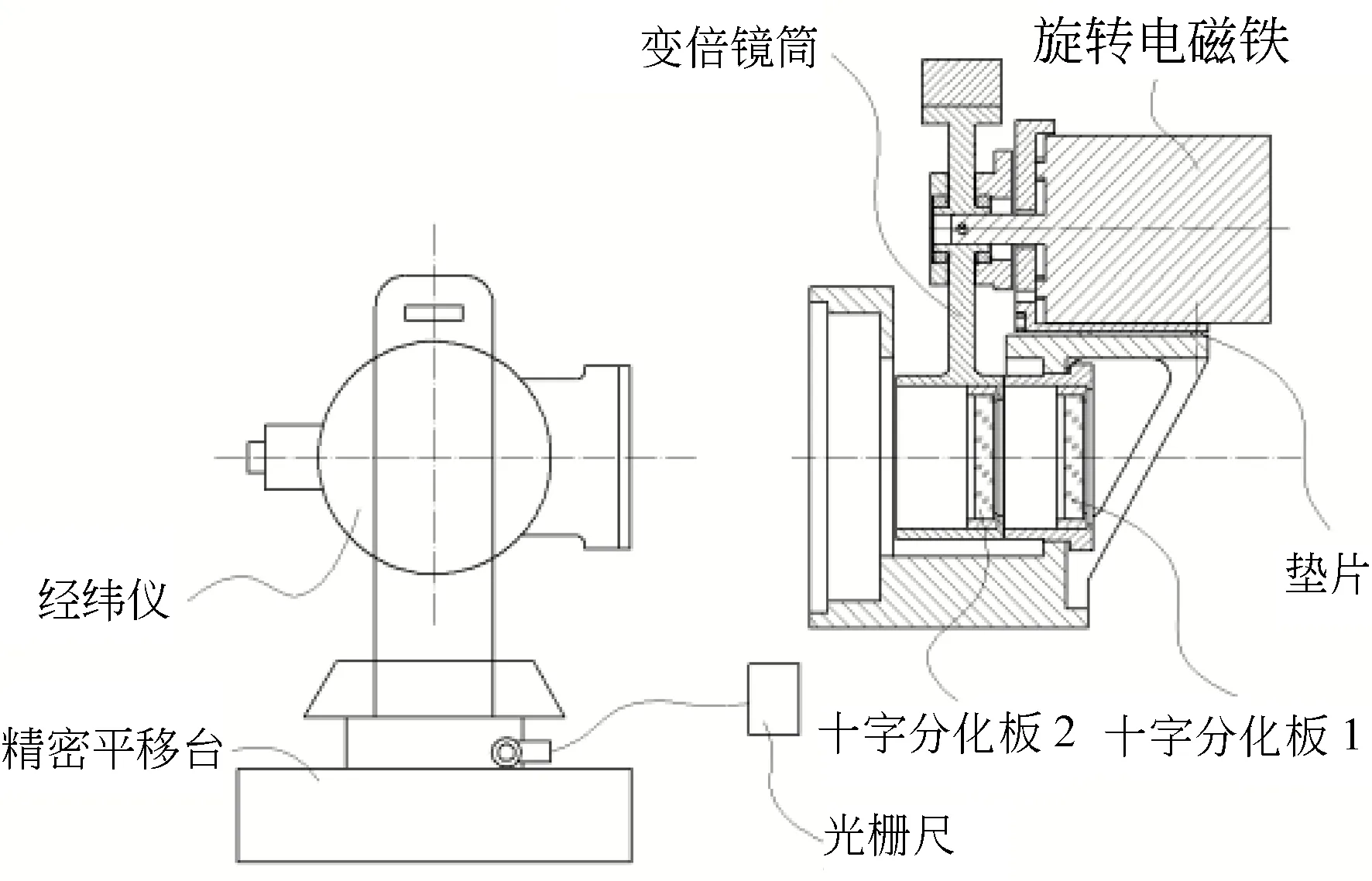
图10 变倍镜组装配测试系统Fig.10 Assembly and test system of zoom lens group
长波红外成像系统的变倍镜组切入后为长波红外成像系统的大视场,由于变倍镜组切入光路时会引入倾斜、偏心误差,对像质产生影响,因此要严格控制变倍镜组切入光路时产生的倾斜和偏心误差。采用光学穿轴工艺对变倍镜组进行装配,设备包括经纬仪、精密平移台、光栅尺和两片十字分化板,如图10所示。首先,将后固定镜组的十字分化板1作为基准,将经纬仪与后固定镜组的十字分化板1进行光学穿轴,即将基准转换到经纬仪;然后将变倍镜组切入光路,将经纬仪与变倍镜组的十字分化板2进行光学穿轴,从而实现变倍镜组与后固定镜组的光学穿轴。通过修切旋转电磁铁支座下的垫片可实现对经纬仪反射像的穿心调整;移动精密平移台并以光栅尺作为位移反馈,通过修切机械限位处的垫片(图中未显示)对经纬仪的中心像进行穿心调整,从而实现对变倍镜组的光学穿轴装配[16-17]。进而能够最大程度保证变倍镜组切入光路后的光轴稳定性。
3.5.1.1 倾斜误差
场地是群众开展乒乓球运动的重要硬件。乒乓球场馆在不影响工作的前提下,需要按时对外开放,为群众健身互动做出服务。相关地方政府也要注重对乒乓球场馆的维护,根据地方情况与发展形势,构建出满足当地群众需求的乒乓球活动中心,因地制宜地使用校园、公园、广场等能够遮风避雨的地方,在群众人数较多的区域构建能够满足群众健身活动的乒乓球场地。
倾斜误差主要以经纬仪反射像作为依据,其主要来自以下几个方面:结构件的加工误差、轴系误差、结构件与轴系装配时的不垂直度误差、振动引起的结构件形变误差、测量误差等。其中,由于结构件刚度很大,变形量很小,形变误差可忽略不计。
采用上述工艺可将结构件的加工误差、结构件与轴系装配时的不垂直度误差等系统误差减小甚至消除,残差取决于检测装置的精度误差,现使用经纬仪进行检测,其分辨率为σ1=4″,按均匀分布考虑,则经纬仪检测引入的误差为:
(14)
轴系误差取决于选取的轴承精度(圆度、直径差和材料硬度不均匀度等)及轴承安装方式,选择一对P4精度的角接触轴承背对背安装,其最大误差σ2=10″,按正态分布,则轴系误差为:
(15)
测量时采用格值为σ3=4″的经纬仪,读数可估读1/10格值,按均匀分布考虑,则测量误差为:
(16)
根据误差合成理论得到:
(17)
3.5.1.2 偏心误差
偏心误差主要以经纬仪中心像作为依据,其主要来自以下几个方面:结构件的加工误差、轴系误差和振动引起的结构件形变误差等。同样由于结构件刚度很大,变形量很小,形变误差可忽略不计。
同样采取光学穿轴工艺,由于经纬仪无法测平移量,借助光栅尺可测出中心像与基准偏移量。因此,仪器误差便转为光栅尺的精度误差,其分辨率为σ4=0.01 mm,按均匀分布考虑,则光栅尺的误差为:
(18)
由于光栅尺为数字式测量仪器,不存在测量读数误差。
轴系误差引起的偏心误差为随机误差,其最大误差σ5=0.02 mm,按正态分布,则轴系误差为:
(19)
根据误差合成理论得:
(20)
3.5.2 光轴晃动对成像质量的影响
变倍镜组的倾斜、偏心误差均会影响光轴在探测器中心的位置。当变倍镜组的倾斜误差为12.1″时,长波宽视场光轴偏离探测器中心0.006 mm,小于1个像素;当变倍镜组的偏心误差为0.027 mm时,长波宽视场光轴偏离探测器中心0.016 mm,小于2个像素;当变倍镜组同时存在0.027 mm偏心误差与12.1″倾斜误差时,此时长波宽视场光轴偏离探测器中心最大值为0.025 mm,小于2个像素。
将上述分析结果带入CODE V软件对长波红外分系统大视场的成像质量进行评价,获得的光学调制传递函数如图11所示。由图可知,变倍镜组切入光路时光轴晃动对长波红外大视场的成像质量几乎没有影响。
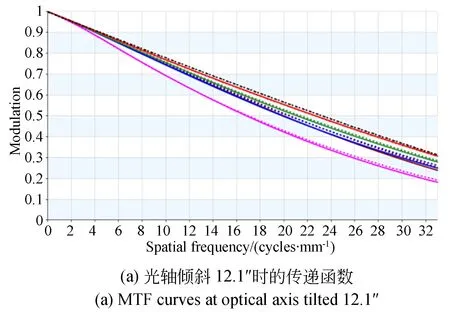
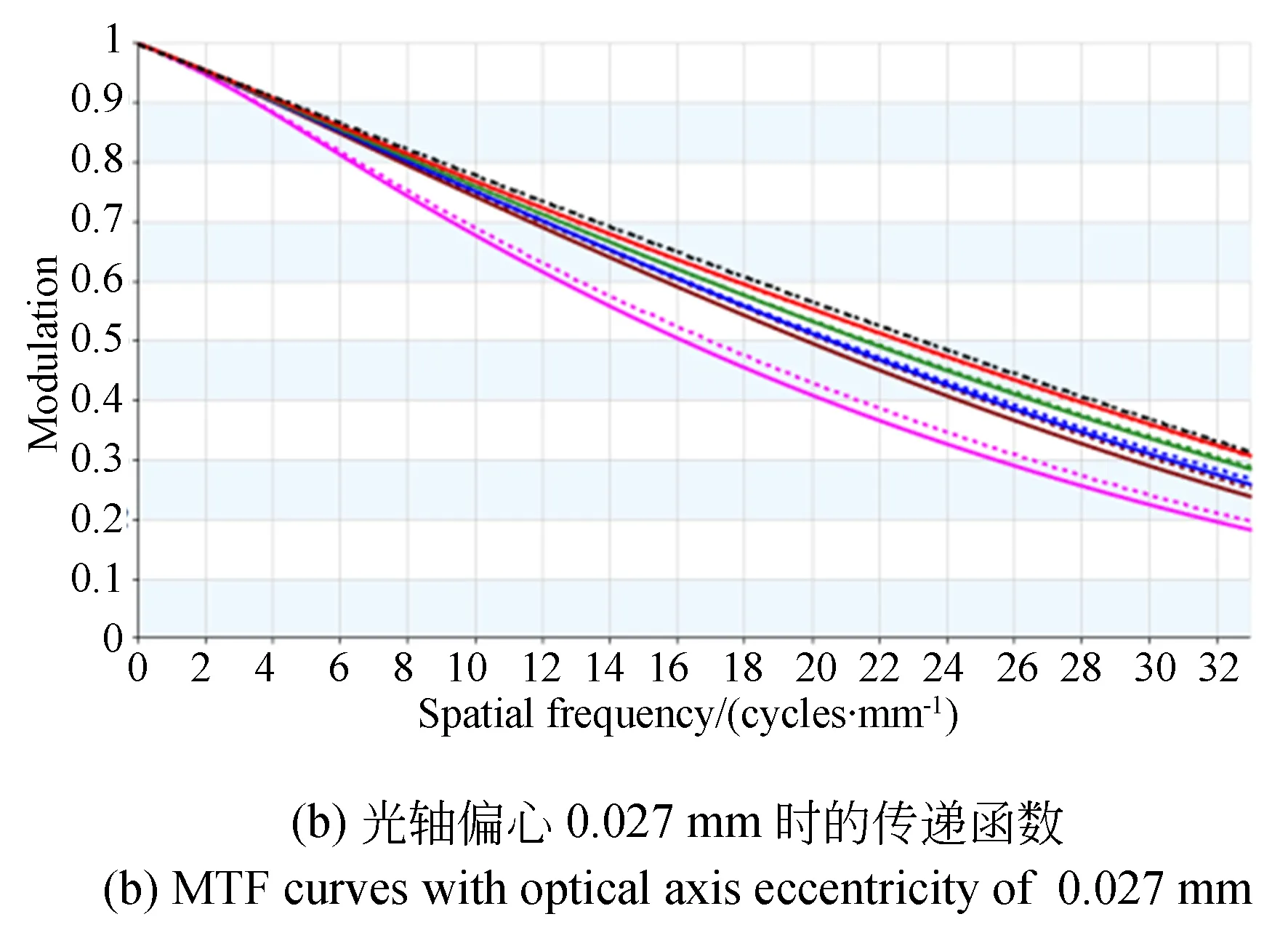
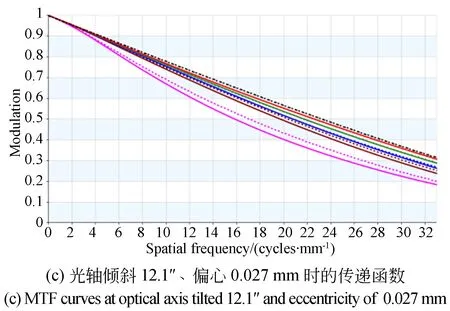
图11 光轴晃动下长波红外分系统的调制传递函数曲线Fig.11 MTF curves of LWIR optical subsystem at optical axis shaking
4 实验与结果
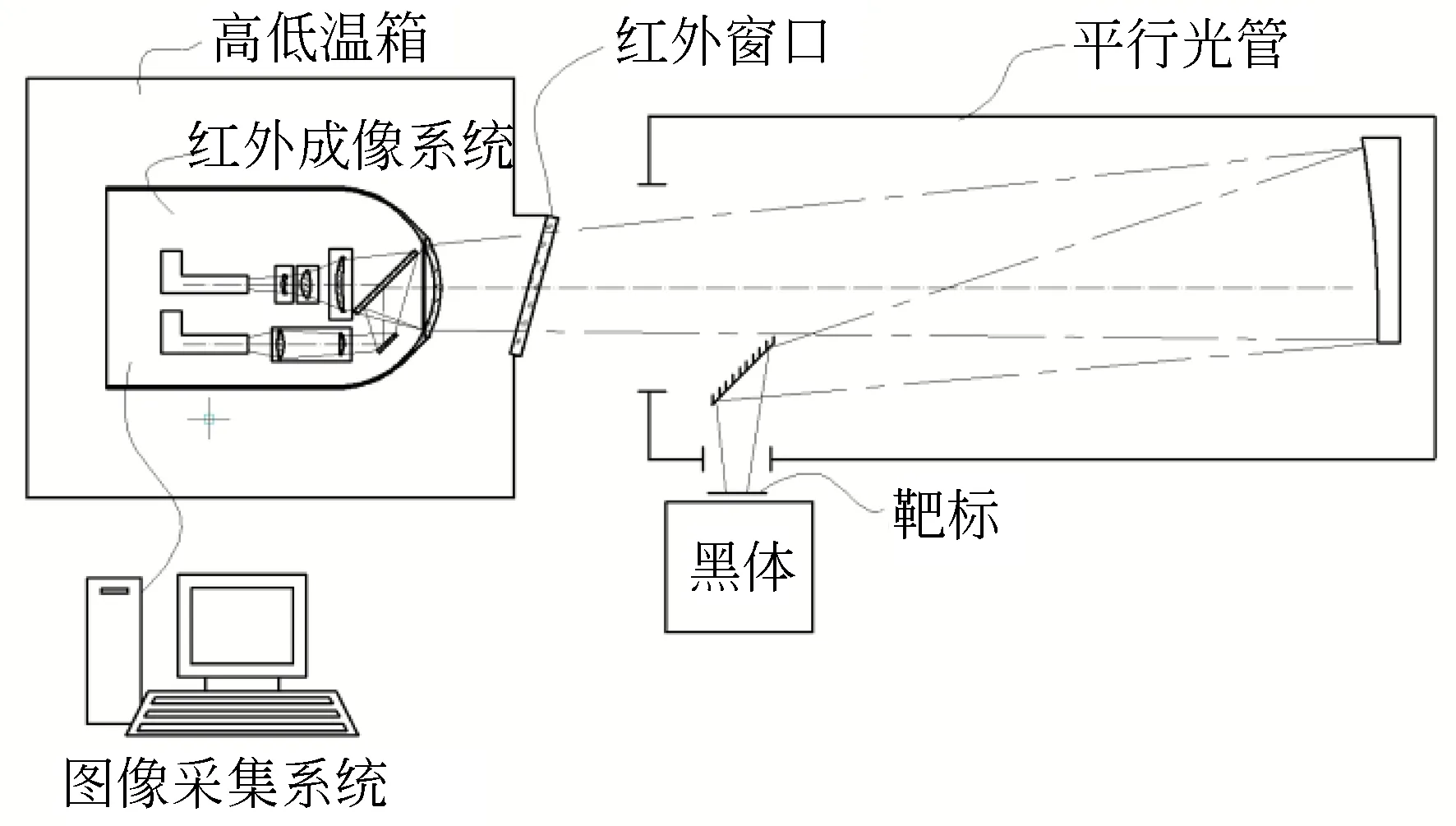
图12 红外成像性能检测系统Fig.12 Performance detection system of infrared imaging system
为了充分考核红外成像告警系统的光轴重复精度、长波红外分系统的大/小视场切换后光轴稳定精度以及视场切换快速响应性能,搭建了如图12所示的性能检测系统。整套系统主要由成像系统、高低温箱、图像采集系统、1 m平行光管、自制十字靶标和黑体等组成。成像系统位于高低温箱内,图像采集系统、平行光管、十字靶标和黑体等位于高低温箱外。为消除红外窗口引起的冷反射现象,红外窗口采取一种倾角安装形式。以黑体作为热源,黑体发射出均匀的热辐射,依次通过十字靶标、平行光管、高低温箱的红外窗口进入成像系统,从而得到无穷远十字靶标在长波/中波红外探测器上的像,再经过图像采集系统显示在显示器上。根据指标要求设定高低温箱的温度对成像系统进行高低温成像性能检测。依次设定高低温箱的温度为-40,20,60 ℃,检测红外成像系统的光轴重复精度以及长波红外分系统大/小视场切换后光轴稳定精度,图13为低温时红外成像系统对十字靶标的一组成像效果图。从图中可看出,中波红外分系统与长波红外分系统大小视场所成十字靶标清晰,靶标边缘锐利,成像质量好;中波红外分系统、长波红外分系统大/小视场的光轴重复精度小于1个像素,且长波红外分系统大/小视场切换后的光轴晃动量小于2个像素,满足总体指标要求。
采用对十字靶标进行视频图像采集的方法对长波红外分系统的大/小视场切换速度进行考核,长波红外探测器的帧频为50Hz,单幅图像间隔为20 ms。依次设定高低温箱的温度为-40,20,60 ℃,使用成像系统对十字靶标进行长波红外视频成像,对变倍镜组切换前后的图像进行逐帧分析,如表2所示。变倍镜组切换前后稳定图像均相差3帧,故其变倍稳定时间约为60 ms,满足双视场切换速度不大于80 ms的总体技术指标。

图13 十字靶标的红外成像效果Fig.13 Images of cross target captured by infrared imaging system
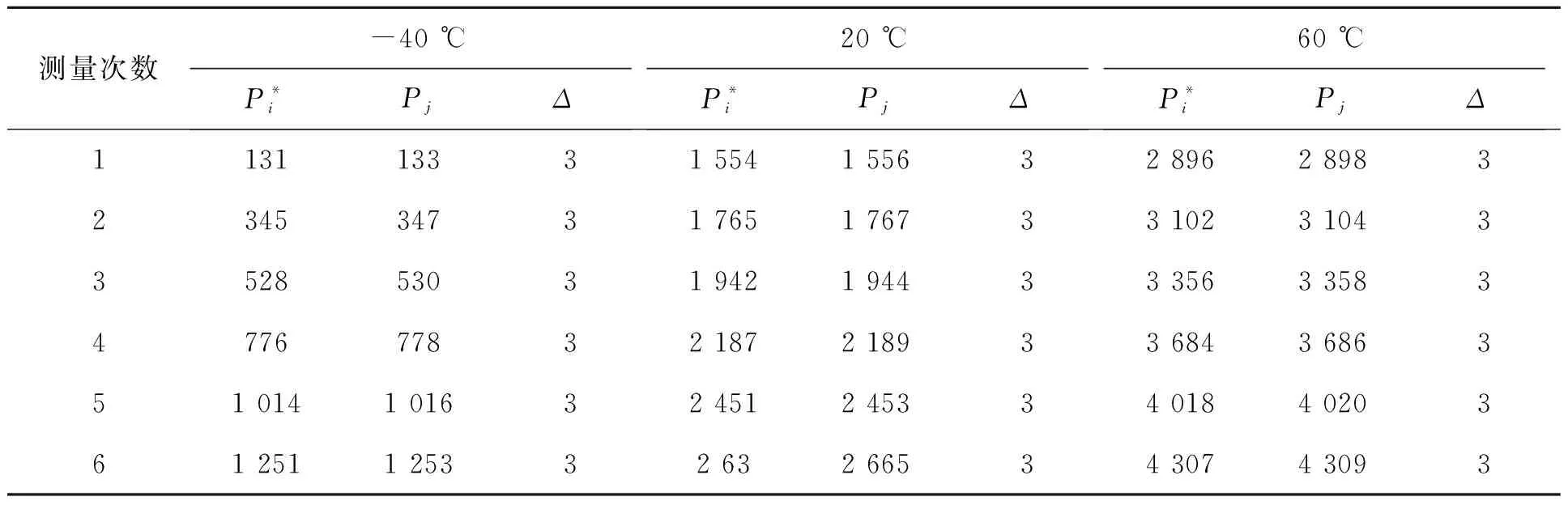
表2 长波红外视频成像测量结果
*Pi为变倍镜组切换前稳定图像帧频值;Pj为变倍镜组切换后稳定图像帧频值;Δ=Pj-Pi+1,即前后帧频差值。
5 结 论
本文基于复杂环境下远距离点目标的探测需求,设计了一种共用窗口与分光镜的紧凑型无热化双波段双视场红外成像告警系统。在系统体积与质量受限的前提下,采用光学被动消热差方法实现了系统在-40~60 ℃大动态温度范围内的无热化设计。采用旋转电磁铁作为驱动元件,同时采用电限位、机械限位以及磁力锁组合定位机构作为限位机构,实现了长波红外分系统快速切换变倍功能以及变倍切换过程中光轴晃动小于两个像素的稳定精度。实验结果表明:红外成像告警系统成像清晰,长波红外分系统的大/小视场变倍切换速度优于80 ms,满足总体指标要求。
猜你喜欢
中国交通信息化(2022年12期)2022-02-11
数学物理学报(2021年3期)2021-07-19
临床眼科杂志(2020年6期)2021-01-13
摄影之友(2020年12期)2020-12-23
制造技术与机床(2019年6期)2019-06-25
宇航计测技术(2017年4期)2017-11-27
中国铁道科学(2015年4期)2015-06-21
中国光学(2015年1期)2015-06-06
大众摄影(2015年5期)2015-05-13
应用光学(2014年3期)2014-06-01