
面向配电室智能监测的传感器巡检机器人设计
2020-07-06 07:57刘宇郑琳于力王春张琼华刘明江
计算技术与自动化 2020年2期
刘宇 郑琳 于力 王春 张琼华 刘明江


摘 要:开发了一种用于配电室危险环境下的多元传感器移动巡检机器人。设计了满足配电室环境的机器人结构,使得巡检机器人具有结构紧凑、体积小、重量轻、携带方便等特点。通过运动学分析,研究了机器人的差动能力和爬升能力。运用PTZ摄像机和控制系统将采集的图像和传感器数据传输通过IEEE 802.11b/g传输到智能维护中心(IMC)。实验结果表明,该机器人能够在配电室内顺利移动,并能有效地对配电室环境进行智能监测。
关键词:配电室;智能监测;传感器;巡检机器人
中图分类号:TP242.6 文献标识码:A
文章编号:1003—6199(2020)02—0067—06
Abstract:This paper develops a multi-sensor mobile inspection robot for distribution room in dangerous environment. The structure of the robot is designed to satisfy the environment of the distribution room,which makes the inspection robot compact in structure,small in size,light in weight and easy to carry. By kinematics analysis,the differential ability and climbing ability of the robot are studied. PTZ camera and control system are used to transmit the collected image and sensor data to the Intelligent Maintenance Center (IMC) through the IEEE 802.11b/g. The experimental results show that the robot can move smoothly in the distribution room,and can effectively monitor the environment of the distribution room intelligently.
Key words:distribution room;intelligent monitoring;sensors;inspection robot
配电室作为电力系统中直接与用电设备相连并分配电能的重要环节,用电设备对供配电的可靠性和稳定性提出了更高的要求[1-3]。对配电室内的配电设备和电缆的稳定性及时发现和告警将直接关系到电网的运行安全[4]。因此对配电室进行智能化监测具有重大意义。智能配电监测系统将传统配电监测技术与现代先进的自动化测控技术[5]、高速通信技术[6]以及计算机技术[7]相融合而构成的新型配电监测系统,是协助提升智能化配电房管理能力的最新工具。
由于配电室存在着环境复杂等缺点,为了保证配电室中配电设备和电缆在运行中零停机时间,必须对火灾事故提前采取检查措施[8]。同时,室内配电室中的有毒气体往往超过可接受的浓度水平。因此,对配电室进行无线、不可触及、在线检测和报警迫在眉睫。目前,红外火灾报警系统已用于配电室智能检测[9],然而固定的监测系统往往无法在发生火灾后进行进一步监测,并且在复杂的配电室环境中安装固定火灾报警系统成本较高。因此,有必要设计一种面向配电室智能监测的传感器巡检机器人。
开发了一种用于室内配电室危险环境下的多元传感器移动巡检机器人。给出了移动机构的结构、张紧机构和机器人机身的有限元分析,通过运动学分析,研究了机器人的差动能力和爬越障碍物能力。运用PTZ摄像机和基于多元传感器的控制系统对配电室环境进行智能监测。
1 配电室巡检机器人的结构
为了使机器人从设备要求工况尺寸700 mm×700 mm的方形轻松地进入一米宽的配电室设备通道,应该使其体积小、重量轻、携带方便[10]。因此,系统要求如下:
(1)主体尺寸:长420 mm,宽320 mm,高300 mm(不含天线)。前臂长度超过200 mm。
(2)移动速度大于24 m/min。
(3)重量小于20 kg。
(4)障碍物高度小于100 mm。
(5)工作时间大于2小时。
为满足上述要求,设计了一种配电室巡检机器人。它由移动机构和控制系统组成。如图1所示,移动机构采用对称双履带驱动,前臂旋转角度从0°到90°。当机器人需要进入配电室时,它将使前臂上升到90°以便通过小型检修孔。当需要跨越障碍物时,前臂可根据高度调整倾斜角度。如果它需要穿过沟槽或跨越线缆时,前臂将降到0°并延伸到水平线。在移动机构的侧面安装了八个超声波传感器用于检测障碍物。
在移动机构上,安装了无边框的PTZ摄像机和控制系统。这款摄像机采用小型压铸铝封装的红外图像传感器,可适用于恶劣环境[11]。摄像机的平移和倾斜角度分别为360°和105°。因此,在配電室中,摄像机比多个固定摄像机能提供更大的采集图像范围。在倾斜轴上装有小型红外温度传感器和激光传感器。当摄像机平移或倾斜时,温度传感器可以检测摄像机拍摄图像中激光所扫描物体的温度。
如图2所示,机器人控制系统的配置包括机器人上的电气控制系统、远程操作和监视器。电气控制系统负责机器人的移动和信号处理。传感器包括倾斜仪、陀螺仪、气体传感器(CO、CH4、CO2、O2)、温度传感器、红外距离传感器和超声波传感器。机器人移动控制器是基于TI 2407DSP设计[12]。DSP、A/D模块、声纳测距模块和其它三个直流驱动器通过串行RS485总线连接在一起[13]。机器人能够在紧急情况下以自主模式工作,如避免碰撞和跨越障碍物等。此外,设计还使用了便携式遥控器来遥控机器人的移动。智能维护中心(IMC)[14]位于更远的位置,通过IEEE 802.11b/g接入点接收监视器无线传感数据[15]。因此,可以通过实时在线系统对配电室的环境进行监测,其中,机器人的一些移动指令也可以从IMC发出。
2 移动机构设计
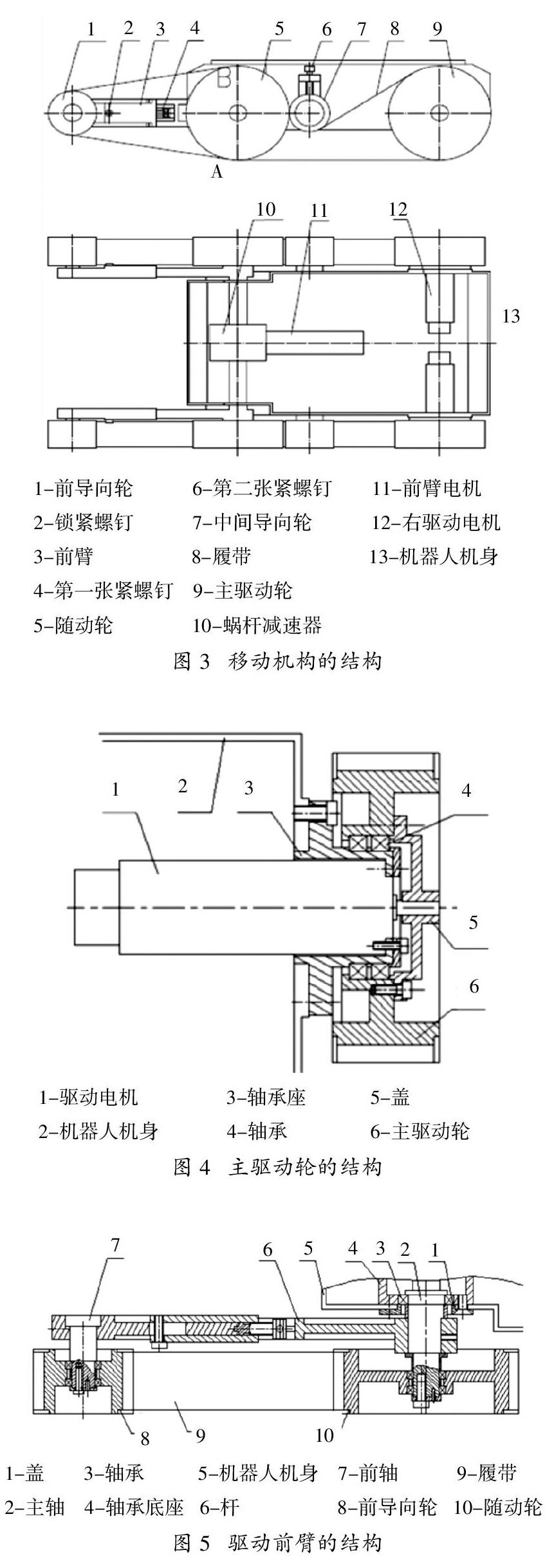
2.1 移动机构的结构
配电室检测机器人移动机构的结构如图3所示。机器人有三个驱动电机,一个驱动前臂通过蜗杆减速器旋转用于越过一些障碍物,如电缆和矮台阶。另两个驱动左右履带分别旋转。其中,履带由四个皮带轮支撑,即主驱动轮、中间导向轮、随动轮和前导向轮(见图3至图5)。所有的轮子都安装在机器人装置的框架上。
2.2 张紧机构
由于机器人仅采用两条履带来支撑前臂和机体框架,因此设计了张紧机构来调节履带张力。
履带与A、B点上的随动轮啮合,将皮带分为前臂部分和车身部分,如图3所示。当第一张紧机构拧紧时,前导向轮和随动轮之间的距离将被调节。然后,在紧固锁定螺钉之后,前臂部分中的履带被张紧。当第二张紧机构拧紧时,中间导向轮将沿指定路径移动。还有一个紧固螺钉,以保持履带在主体部分的张力。
2.3 机器人机身的有限元分析
如图3所示,机器人机身是配电室巡检机器人的最大部件,其中安装了车轮和控制系统。机器人机身采用半封闭式结构设计,由四块侧板和一块底板厚度为3 mm的铝合金焊接而成。
由于机器人的重量小,强度高,因此有必要对其进行有限元分析。3D模型、啮合结果和有限元分析分别如图6、图7和图8所示。
分析表明,受重力和履带张力的影响,最大应力和最大变形均满足设计要求。同时,机器人机身重量小于3 kg,便于携带。
3 运动学分析
3.1 差动分析
采用差动方法控制机器人的姿态。转弯半径和轨道速度之间的关系,如图9所示。
因此,转弯半径R0可由以下公式得出:
其中,S为两个履带中心之间的间隙,va和vi分别为左右履带的线速度。
3.2 爬越障碍物
以主驱动轮中心为半径R的原点建立笛卡尔坐标系。假设重心坐标为O(x′0,y′0),X′轴与水平线的夹角为?准,障碍物的高度为h,转弯半径与轨道速度的关系和机器人的爬升状态分别如图10和图11所示。
则机器人爬升障碍物的高度可表示为:
由上述公式可知,爬升高度取决于重心的位置和主驱动轮半径。考虑h对x′0、y′0和R的偏导数,则有
因此,可以推断h是x′0的单调递增函数,并且它是y′0和R的单调递减函数,因此,如果x′0增加,或者y′0和R减少,则机器人的爬升能力将会提高。
4 机器人的操作程序
巡检机器人所面临的复杂任务会因配电室环境的差异而有所不同。但是,它们在两个方面是相似的:(1)需要考虑放或吊的程序;(2)应考虑巡检程序。
对于一个700 mm × 700 mm的巡检通道,对于机器人的检测方法,数据采集过程如下:首先,摄像机捕获一帧图像,然后,通过图像处理算法识别出通道的路径。如果通道被阻塞,机器人将停止并将通道状态反馈给监视器。否则,机器人将根据图像处理结果规划其移动路径。同时,及时收集CO、CH4、CO2、O2等气体浓度。
由于火灾事故通常是由配电设备或电缆的高温引起,因此机器人对配电设备和电缆温度的检测非常重要。必须检测配电设备及沿线电缆上各点的温度。所有的温度检测都是由图像帧中的激光光点位置自动完成。因此,如果机器人需要检测配电设备和电缆的温度时,机器人的主驱动轮将首先停止。然后,PTZ摄像机将平移轴和倾斜轴旋转,当激光所扫描设备及電缆的图像中被识别为亮点时,红外温度传感器将测量该点周围的温度。不仅配电设备和电缆的温度和气体的浓度存储在机器人的存储器中,而且数据通过监视器传输给远程操作人员。如果温度或气体浓度不在安全范围内,将输出一个警告信号,机器人将沿原路径返回。
5 实验分析
以云南省某供电局配电室为例,在配电室中进行了大量可靠的试验。机器人在配电室中的巡检,如图12所示。远程操作端的无线发送器和接收器,如图13所示。
在实验过程中对机器人进行了移动能力的测试。通过图像识别可以控制机器人的转向和避障功能。当遇到像墙这样的无法跨越障碍物时,机器人将在预定安全距离内停止,该距离根据移动速度设定(例如5 m/min,其相应的距离值为0.2 m)。在调整了速度va和vi后,机器人可以根据公式(1)以所需的转弯半径旋转来避开障碍物,并继续向前移动。
当遇到可跨越的障碍物时,如电缆、门槛或台阶,机器人将尝试跨越障碍物。实验结果表明,当倾斜仪传感器的反馈角度小于44°时,将可以跨越障碍物,否则将无法跨越。实验还表明,障碍物的最大可跨越高度为105 mm。
配电室中监测到的气体浓度与温度的传感器警报值范围,如表1所示。
从表1可以看出,机器人发现的CH4和CO水平越低,配电室越安全。如果机器人观察到空气中O2浓度低于21.9%时,则会发出警告信号。CO2浓度的安全范围为300 ~ 500 ppm。在所设计的机器人系统中,当配电室中配电设备和电缆的温度分别超过80 ℃和50 ℃时,也会输出警告信号。如果配电室机器人的远程操作人员或监视器接收到警告信号,则应及时对配电室内的设备及电缆进行现场检测及维修。
6 结 论
設计了一种用于巡检配电室危险环境下的多元传感器机器人。为了便于携带机器人,设计了一种重量小于3 kg的对称双履带机器人。通过运动学分析,研究了机器人的差动能力和爬升能力。此外,还介绍了该机器人采集设备图像和有毒气体浓度数据的传感器检测方法。实验结果表明,该机器人能够在配电室内顺利移动,并能有效地对配电室中配电设备及电缆进行巡检。
参考文献
[1] 何方,张军,王松亭,等.高压开关配电室SF6气体浓度变送器标定系统的设计[J].电子世界,2018(23):133-134.
[2] 赵春凤.35 kV变压器跳闸事故分析[J].机电工程技术,2018,47(10):84-86.
[3] 童鹰.某公司某核心机房变配电系统增容改造[J].通信电源技术,2018,35(09):126-128.
[4] 向真,张宏钊,姜勇,等.一种高压室消防机器人[J].机械与电子,2018,36(12):64-68.
[5] 刘光辉,方景林,夏士旸,等.室内热环境监测分析系统设计[J].辽宁科技学院学报,2018,20(04):6-7.
[6] 曾庆武. 优化配电室网络运行环境的方法[J]. 电子技术与软件工程,2017(12):11.
[7] 吕平,向珉江,赵嫄,等. 居民小区智能化配电室建设方案探讨[J]. 山东电力技术,2016,43(09):46-49.
[8] 严冬,龙国强,王平,等. 基于Modbus协议的配电室环境监测系统设计[J]. 四川大学学报(自然科学版),2015,52(03):538-546.
[9] 陈婷. 浅谈火灾自动报警系统在工业厂区的应用[J].通讯世界,2017(11):277-278.
[10] MONROY J G,BLANCO J L,GONZALEZ-JIMENEZ J. Time-variant gas distribution mapping with obstacle information[J]. Autonomous Robots,2016,40(1):1-16.
[11] 潘振福,朱永利,周国亮. 基于改进核相关滤波器的PTZ摄像机控制方法[J]. 机器人,2016,38(04):420-427.
[12] 郭红艳,王会霞. 基于TD-SCDMA与DSP2407的微弱通信信号检测系统设计[J]. 计算机测量与控制,2015,23(04):1352-1354.
[13] 扈书亮,韩淼. 基于Modbus总线的一主多从数据采集系统的设计[J]. 工业控制计算机,2018,31(11):34-35.
[14] 孙玥,张纲,郑艳秋,等. 基于内模控制(IMC)的主汽温度控制系统设计[J]. 计算机测量与控制,2018,26(10):98-101.
[15] 杨春雷,银伟,邢国强. 802.11无线网络拒绝服务攻击与安全防护技术研究[J]. 网络安全技术与应用,2018(12):85-87.
猜你喜欢
中国电子报(2019年54期)2019-10-24
中国电气工程学报(2019年5期)2019-10-21
山东工业技术(2019年24期)2019-08-26
时代英语·高一(2019年1期)2019-03-13
中国计算机报(2018年30期)2018-11-12
中学物理·初中(2017年8期)2018-03-06
科学家(2017年11期)2017-07-29
劳动保护(2017年1期)2017-03-15
劳动保护(2017年1期)2017-03-15
新高考·高一物理(2015年5期)2015-08-18
