
智能阀门定位器控制系统设计
2020-07-06 01:08汪川
自动化仪表 2020年6期
汪 川
(上海宝信软件股份有限公司,上海 201900)
0 引言
传统阀门多用手动调节[1],且需现场调整来适应生产要求。然而在一些操作不方便或有害物质存在的地方,无法用手动调节。因此,研究智能阀门定位器具有十分重要的现实意义。本文设计了一种基于MSP430的智能阀门定位器控制系统。该系统实现了阀门控制参数的自整定[2],可自动设定阀门动作所必需的全部参数,包括:阀门的零点和量程,作用方向;阀门的动作速度;参数KP、KI、KD的值及死区;阀门的全开和全关时间等。该系统提高了阀门定位器的控制精度和定位速度,具有广阔的应用前景[3]。
1 系统方案设计
本文所设计的系统主要由控制核心、通信、LCD显示及按键输入、采样、阀位反馈、电气转换等模块构成。
1.1 控制核心模块
本系统是以MSP430F149单片机作为核心控制器[4],利用其片内外设和数据处理功能进行设计的。4~20 mA电流为整个系统的输入,采用二线制(工业标准的4~20 mA电流信号)结构。电源和控制信号线共用两根导线,其电源本身取自信号线。通过4~20 mA采样电路,实现控制信号的采样,并将其作为阀门工作设定值。系统结构如图1所示。
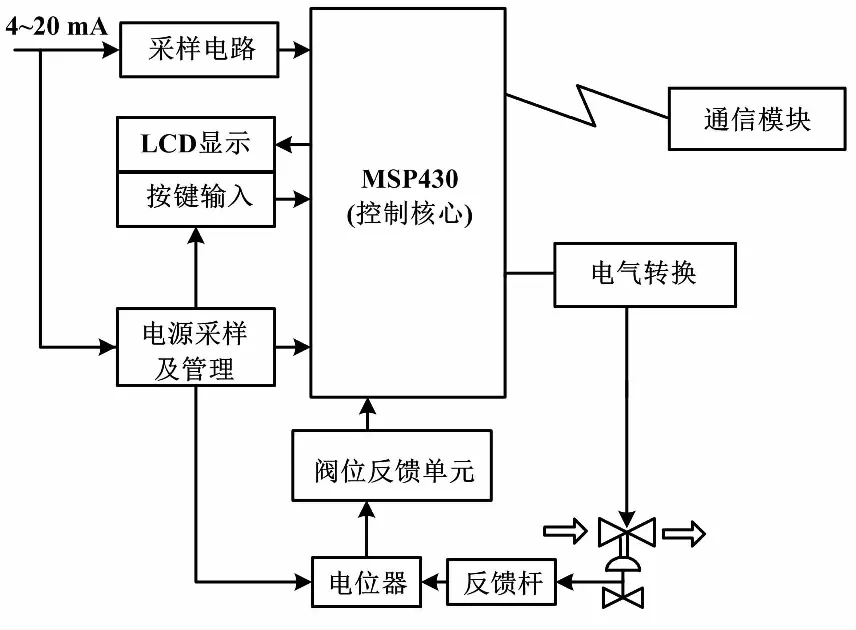
图1 系统结构示意图
1.2 LCD显示及按键输入模块
LCD显示及按键输入模块用于提供人机接口。通过LCD,用户可直观地获得阀门当前的开度、工作模式和一些具体工作参数,并可配合按键设置系统的工作方式、系统参数等。
1.3 阀位反馈模块
阀位反馈模块通过角位移传感器测量执行器阀杆的位移,将阀杆的位移量转换为电量,以负反馈的形式连接到系统的输入,构成阀门位置系统的闭环控制回路,提高系统精度。执行器阀杆移动过程中,带动固定在其上的反馈杆转动;固定于反馈杆的电位器检测装置转动,并产生电信号;经过反馈单元处理,形成电压信号,送至控制器处理。
1.4 电气转换模块
电气转换模块实现完成电气转换功能。通过微控制器输出的电信号,控制压电阀,完成气路充气或放气,从而改变作用于气动调节阀的气路气压。这样,即可推动阀杆移动,完成阀门定位。
1.5 通信模块
通信模块利用单片机上的USART接口[5]。发送时,数据由UTXD端送出。接收时,数据由URXD端输入。它是可编程的全双工串行口。基于单片机的下位机,主要完成现场数据的采集与处理,并通过无线的方式将数据发送到上位机。上位机根据用户设定,定时向下位机发出读取数据的命令,并接收返回的数据值。
2 控制系统软件设计
根据系统的功能要求,本系统的主要流程包括:系统初始化、阀门开度及各种参数的显示、A/D采集、系统自整定、按键的处理、控制算法的实现、故障处理及安全保障程序等。
2.1 系统初始化
系统初始化包括:标志位及单元的清零;单片机I/O口的设置;液晶显示驱动芯片NJU6433、存储芯片EEPROM等与MSP430F149的接口定义;各个参数单元的初始值设定;定时器工作方式的设定;定时器初值的设定;中断标志的设定等。
2.2 阀门开度及各种参数的显示
系统正常工作时,要显示阀门开度及其他各种信息。当液晶显示屏显示系统状态时,即开始等待键盘输入;输入有效值后,则在液晶显示屏上显示所需查看的各种模式。
智能阀门定位器的工作模式主要有自动模式和手动模式。
自动模式是智能阀门定位器的常用工作方式,也是智能阀门定位器的核心功能部分。它通过自适应控制程序,根据系统输入的电流设置值完成阀位开度的闭环控制,不断减小系统输入输出偏差,并可将阀门实时开度百分比、工作方式显示在液晶屏上。
手动模式是通过按键,设置系统自动模式向手动模式的切换。此时,系统将放弃对阀位开度的闭环控制,允许用户采用UP和DOWN键控制阀位,并在液晶显示屏上显示当前系统的阀位开度百分比。通过按下UP和DOWN键,完成现场调整:长按UP键,实现系统的快速充气;长按DOWN键,实现系统的快速放气;释放UP和DOWN键,保持当前状态,执行机构停止。
2.3 A/D采集
MSP430单片机带有8路的12位A/D转换模块,在这里选用了三路采集通道,分别对输入信号、反馈和速度进行采集。使用单通道多次采样的方式,每隔一定的时间对当前值进行检测,并将检测到的值与设定值进行比较,得到正确的显示值,传送至LCD显示。
2.4 控制算法
采用积分分离的PID控制算法[6]。控制单元比较采样、滤波处理后得到的设定值(set value,SV)与反馈值(process value,PV)获得系统的输出误差;通过控制算法计算,输出控制信号,驱动压电阀动作,控制气动调节阀、气腔气压、驱动执行机构动作,完成阀位的闭环控制[7]。
主程序是整个系统软件的运行主体,各个子系统软件都必须经过它的调度,才能运行得当。主程序包括初始化程序、看门狗复位及通信发送启动等。初始化主要完成上电自检ROM、RAM、EEPROM、I/O;将系统中所有的命令、状态以及有关的存储单元置成初始状态;分配内存单元及设置定时器参数等。故障判断及安全处理程序,可为系统正常工作创造条件。在主循环系统中,随时等待中断的发生,并转入相应的中断处理程序。同时,通过按键功能,进入相应的按键处理程序[8]。
系统总体程序流程如图2所示。
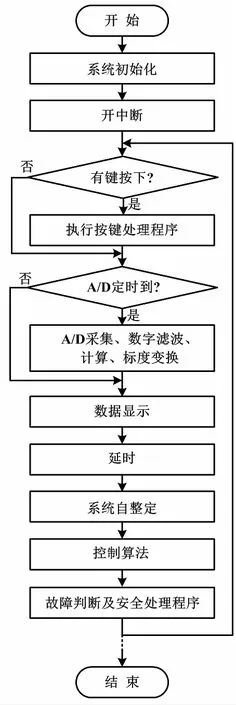
图2 系统总体程序流程图
3 系统测试及试验结果
当阀门流量特性为线性流量特性时,阀门流量特性测试结果如表1所示。
从表1的试验数据可以看出,系统控制后的流量特性和预期的目标流量特性是相吻合的,系统的精度控制在1%之内。由此证明,本控制系统能够稳定运行,可靠性高,具有良好的动态响应特性。

表1 阀门特性
4 结论
本文提出了一种以MSP430为核心的智能阀门定位器。阀门的动作模式、流量特性、自动调零与调量程、段幅控制、各个参数的确定、现场数据的显示等,都可由系统自动设定,也可根据用户需求进行自定义。阀门定位准确,具有较好的控制精度和响应速度[9-10]。该设计在实际工业生产中具有较高的应用价值。
猜你喜欢
仪器仪表用户(2022年2期)2022-02-18
电子制作(2021年3期)2021-06-16
科学与财富(2021年33期)2021-05-10
北京汽车(2021年2期)2021-05-07
科技创新导报(2021年33期)2021-04-17
发电技术(2020年3期)2020-06-29
电子制作(2019年13期)2020-01-14
戏剧之家(2018年21期)2018-10-19
数码世界(2018年7期)2018-08-11
小学生作文选刊·低年级版(2017年4期)2017-06-07
