
基于无位置传感器的电子水泵控制系统设计
2020-07-04 02:27朱文龙马西沛何郑王一鸣
智能计算机与应用 2020年3期
朱文龙 马西沛 何郑 王一鸣

摘要:在对无位置传感器直流无刷电机(BLDCM)的工作原理分析后,本文设计了一种基于无位置传感器的BLDCM控制系统。根据汽车用电子水泵对控制器功能的要求,该系统主要包括CAN通信電路、电流检测电路、电机驱动电路、电平转换电路等;采用速度和电流双闭环控制,输出转矩稳定,提高了电机的响应速度。最后利用以STM32系列微控制为核心的BLDCM实验平台进行验证,实验结果表明,该控制系统具有较好的稳态和动态性能,适用于汽车、卡车或其它工业领域。
关键词: 无刷直流电机; 矢量控制; 无位置传感器; STM32
【Abstract】 After analyzing the working principle of the position sensorless brushless DC motor (BLDCM), a BLDCM control system based on position sensorless is designed. According to the requirements of the controller for the electronic water pump of the automobile, the system mainly includes a CAN communication circuit, a current detection circuit, a motor drive circuit, a level conversion circuit, etc.; uses the double closed loop control of speed and current, stabilizes the output torque and improves the response speed of the motor. Finally, the BLDCM experimental platform based on STM32 series micro-control is used to verify. The experimental results show that the control system has good steady-state and dynamic performance, which is suitable for automotive, truck or other industrial fields.
【Key words】 brushless DC motor; FOC; positon sensorless; STM32
0 引 言
无刷直流电机(BLDCM)具有结构简单、运行可靠和效率高等显著优点,近年来被广泛应用到电器、车辆、航天和军事等领域。在无刷直流电机控制当中,通常采用有位置传感器获取转子信号位置的方法。有位置传感器控制方案具有控制程序相对简单、维护简单等优点[1],但其结构复杂、成本高和易损坏的特点限制了其在振动环境、高温环境等恶劣工况下的应用,例如汽车发动机舱,因此本文拟采用无位置传感器控制方案对汽车电子水泵控制器进行设计。在中小功率无刷直流电机设计中,常常采用转矩分数槽绕组,其反电动势波形比较接近正弦波[2],本文讨论的就是反电动势为正弦波的无刷直流电机。对于反电动势为正弦波的无刷直流电机,通常具有方波驱动和正弦波驱动两种控制方法。方波驱动控制方法,系统噪声大,运行效率低,转矩波动大;相比之下,正弦波驱动具有明显的优势,正弦波驱动控制下,电机不仅效率高,运行噪声也低,因此,本文采用正弦波的驱动方法。
基于正弦波的优点,国内外学者研究了各种正弦波驱动方法[3-6]。简易正弦波(SPWM)方法由于无法获得最大转矩,因此需要调整电压相位;磁场定向控制,简称矢量控制(FOC)方法虽然算法实现较为困难,但具有控制精度更高、输出转矩大和高效率等优点。因此,本文采用STM32F103RCT6微控制器作为电机控制系统主控芯片,实现基于无位置传感器的直流无刷电机的矢量控制;该方法不仅成本低,还能实现复杂的控制算法,具有较好的应用前景。
1 原理分析
1.1 转子磁场定向控制技术
2 控制系统硬件电路设计
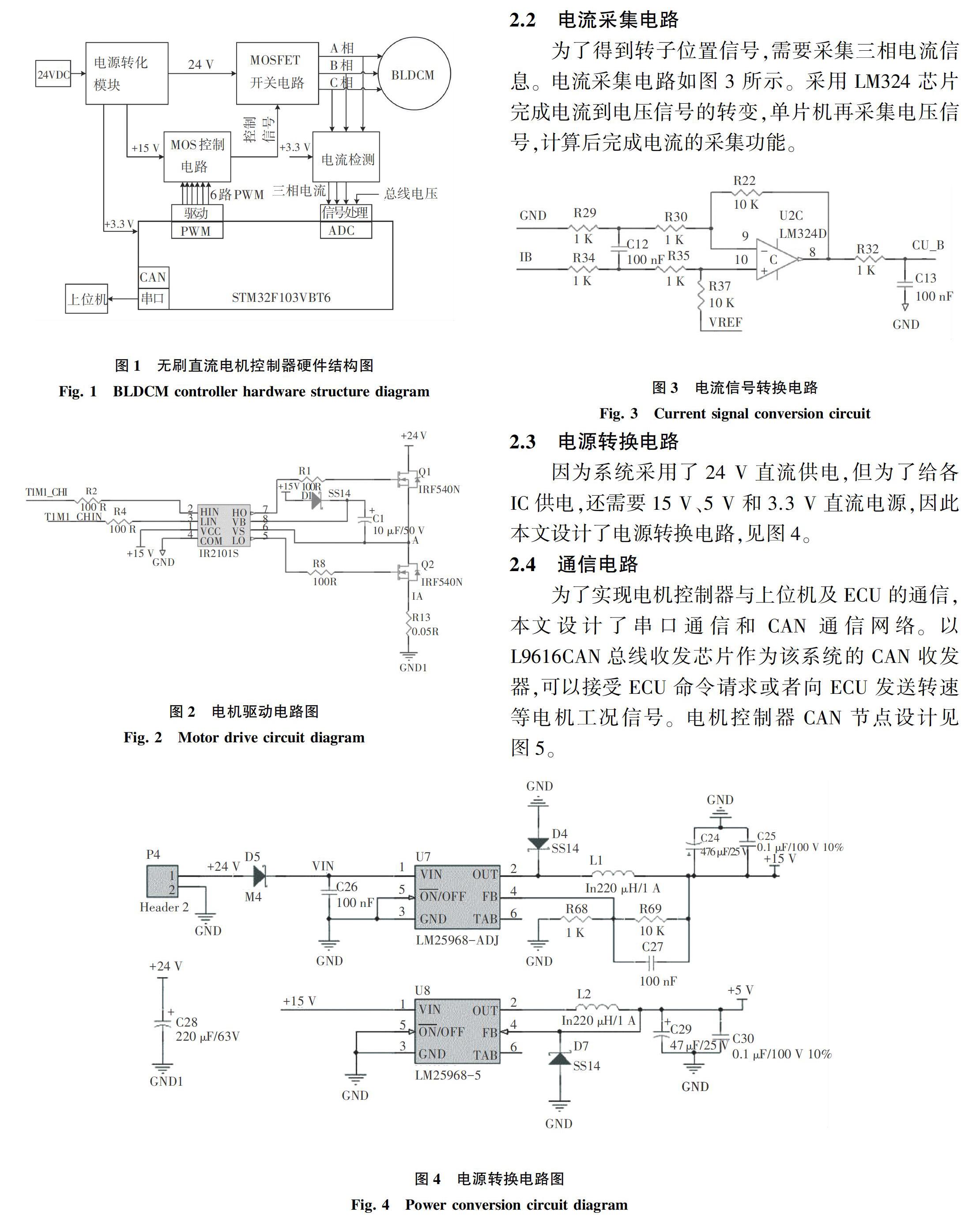
无刷直流电机的无位置传感器控制系统由电源转换电路、单片机电路、MOSFET驱动电路、电压电流检测电路和通信电路等共同组成,硬件系统各模块如图1所示。单片机采用ST公司的STM32F103C8T6为主控制芯片,主频率达72 Mhz,满足控制系统对性能的需求。
2.1 MOSFET驱动电路
在电机驱动电路中,本文选用IR2101S作为MOS管开关控制芯片,选用IR公司的IRF540N作为MOSFET开关管。IR2101S控制芯片的反应时间为150 ns左右,可以同时控制2个MOS管,性能优异,满足本文研究的需求;IRF540N在100°下最大能承受23 A电流,瞬间峰值电流为110 A。电机驱动电路如图2所示。
2.2 电流采集电路
为了得到转子位置信号,需要采集三相电流信息。电流采集电路如图3所示。采用LM324芯片完成电流到电压信号的转变,单片机再采集电压信号,计算后完成电流的采集功能。
2.3 电源转换电路
因为系统采用了24 V直流供电,但为了给各IC供电,还需要15 V、5 V和3.3 V直流电源,因此本文设计了电源转换电路,见图4。
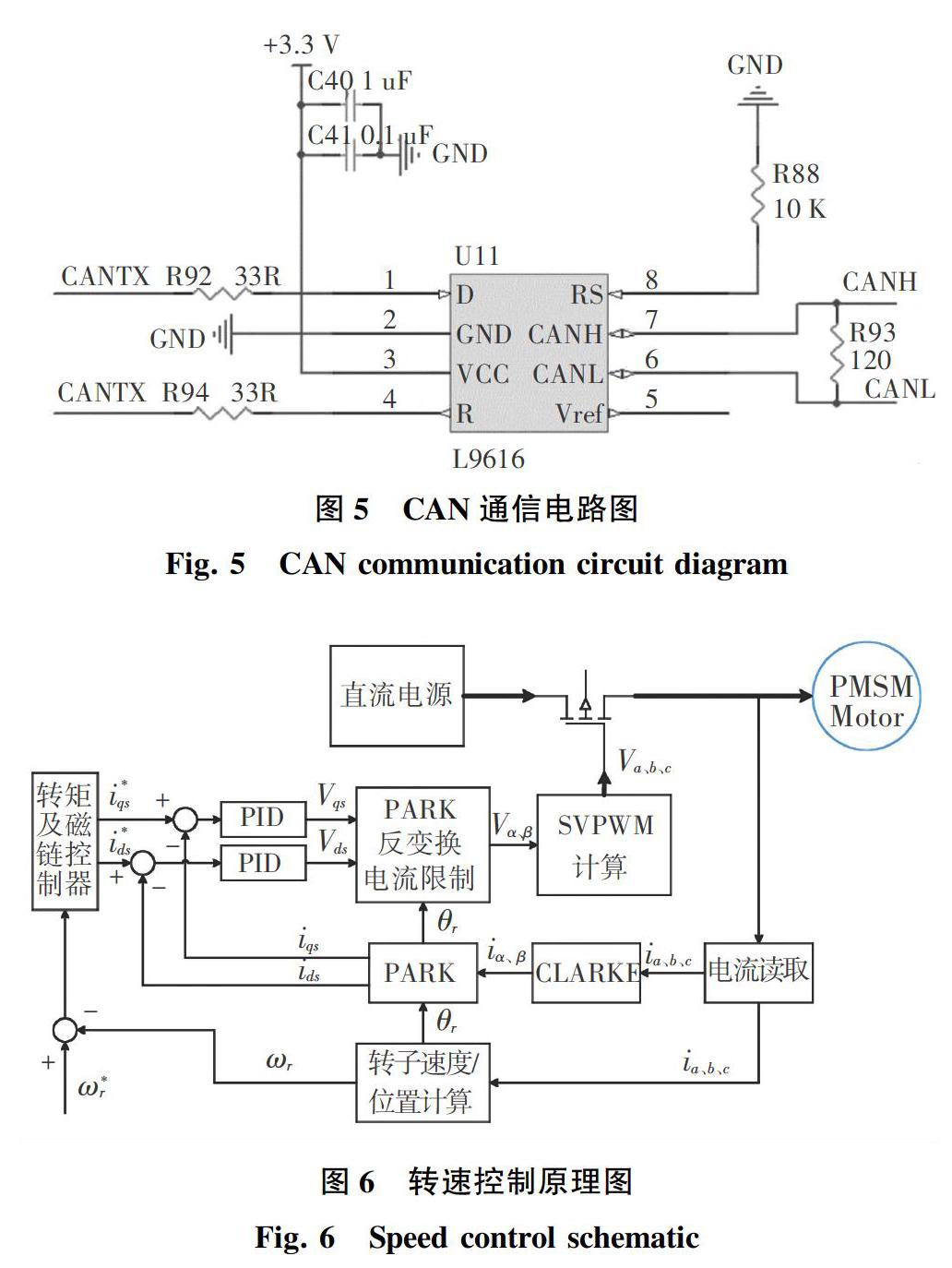
2.4 通信电路
为了实现电机控制器与上位机及ECU的通信,本文设计了串口通信和CAN通信网络。以L9616CAN总线收发芯片作为该系统的CAN收发器,可以接受ECU命令请求或者向ECU发送转速等电机工况信号。电机控制器CAN节点设计见图5。
3 控制系统软件设计
本文设计内环为电流环。通过电流采样得到电流信号,通过Clarke和Park变换后得到d、q轴电流iqs和ids;再经过q、d轴电流PID调节器,Park反变换后,并由SVPWM调制后,转变为逆变器电路控制信号输入电机逆变电路中。外环设计为转速环,由前文推论可知,由电流信号可以计算出转子的位置信息和转速信息,通过与目标转速相减得到速度偏差后,经过转矩及磁链控制器,得到q、d轴的电流参考信号,随后系统进入内环处理程序。转速控制原理图见图6。本文选择TIM1高级定时器的CH1、CH2和CH3通道为三相逆变电路的上桥臂PWM驱动信号,选择CH1N、CH2N和CH3N为逆变电路的下桥臂PWM驱动信号。由STM32芯片的ADC1、ADC2的多个通道进行采集电流信号。
5 结束语
针对方波驱动容易出现电磁噪声大、转矩脉动大等问题,本文基于无位置传感器控制策略,实现了正弦波驱动的转速和电流双闭环控制方案。实验结果表明,该方案获得较好的系统动态和稳态性能,达到了比较理想的控制效果,并且具有较高的工程应用价值,同时也为以后的程序优化研究提供了支撑。
参考文献
[1] 夏长亮. 无刷直流电机控制系统[M]. 北京:科学出版社, 2009.
[2] 吴勇, 王友仁, 王强, 等. 基于STM32的无刷直流电机正弦波驱动控制系统设计[J]. 微电机, 2015,48(9):39.
[3] 黄科元, 金其军, 黄守道. 一种永磁同步电机转子位置混合辨识方法[J]. 电工技术学报, 2018, 33(9):1938.[JY](下转第278页)[FL)]
[4] 刘云, 贾洪平, 张鹏, 等. 基于SVPWM的无刷直流电机矢量控制系統研究[J]. 机电工程, 2014,31(9):1177.
[5] 姚绪梁,鲁光旭,王景芳,等. 基于最优电流矢量的无刷直流电机换相转矩脉动抑制方法[J]. 中国电机工程学报,2019,39(14):4272.
[6] 胥思蒙, 耿攀. 基于滑模观测器的永磁同步电动机无传感器控制策略[J]. 上海电机学院学报, 2018, 21(5):8.
[7] 华志广, 窦满峰, 赵冬冬, 等. 基于改进型滑模观测器的PMSM无位置传感器控制[J]. 西北工业大学学报, 2018,36(4):754.
[8] 王正, 王一平. 基于滑模观测器的PMSM无速度传感器研究[J]. 微电机, 2012, 45(5):52.
[9] 李冉. 永磁同步电机无位置传感器运行控制技术研究[D]. 杭州:浙江大学,2012.
[10]张乘玮, 沈汉林, 唐其鹏, 等. 一种高效的PMSM无位置传感器I/f控制方法[J]. 微特电机, 2017,45(10):48.
[11]李海剑, 易映萍. 基于自适应扰动观测器的PMSM无传感器控制[J]. 电子测量技术, 2018,41(21):123.
