
既有地铁线自动化监测技术的应用研究
2020-07-04 13:55:00齐昌洋
江西建材 2020年6期
齐昌洋
湖南高速铁路职业技术学院,湖南 衡阳 421002
1 工程背景
东方·智尊堡项目位于南宁市青秀区高坡岭路与凤岭22号路交叉口西南象限地块内,项目东侧高坡岭路下方为南宁轨道交通1 号线百花岭站及埌东客运站~百花岭站区间隧道。南宁轨道交通1号线已于2016年12月28日投入运营。在东方·智尊堡项目基坑土方开挖过程中,对既有地铁1 号线百花岭站可能造成影响,为实时掌握东方·智尊堡项目施工过程中对南宁市轨道交通一号线百花岭站的影响,保障既有地铁1 号线的运营安全,需要对既有地铁1 号线百花岭站进行变形监测。
采用常规方式进行变形监测时,需要测量人员在地铁线路上行走,而地铁运营时又封闭线路,只能晚上地铁停运后才能进行,所以常规的测量方法不能保证实时采集监测数据,也就是不能保证地铁运行安全。因此,工程采用基于测量机器人的自动化监测系统,可实时掌握东方·智尊堡基坑工程项目建设过程中对既有地铁百花岭站车站结构形状和对道床、轨道状况的影响,提供动态监测数据,以便及时评定东方·智尊堡基坑工程施工对既有地铁线的安全影响,从而对工程施工项目采取相关预案、对已经发生变形的地铁线路及时进行维修养护作业,确保既有地铁线运营安全。
2 自动化变形监测系统构成
系统主要包括系统硬件和系统软件两部分。
2.1 硬件部分
变形监测系统如图1 所示,由三部分组成:监测工作站、主机房、测量点位。
监测工作站:根据现场实际情况,选择合适位置,建设观测墩,要保证点位稳固性与良好的视野,并安置好测量机器人。测量机器人指的是测角精度在1″级以上的智能型全站仪,拥有伺服马达,可以实现自动目标识别、自动照准、自动测角与测距、自动目标跟踪、自动记录等功能,根据远程计算机设置参数,实现多目标连续、重复观测。由于配备了供电电源和通讯模块,实现了全自动化的实时监测和传输。

图1 自动化变形监测系统
主机房:主机房指的是控制计算机房,设置在办公室。机房内的计算机通过通讯电缆和测量机器人相联。在主机房可以设置测量机器人的测量参数(间隔时间、重复次数等),还能实时了解其运行情况。
测量点位:包括了基准点和变形监测点。基准点设置在变形区域之外,作为监测的基准,基准点不少于3 个。变形监测点采用徕卡L 型棱镜安装在变形体上,棱镜面朝向观测墩。
2.2 软件部分
主要由联机测量模块和数据处理模块组成。
联机测量模块:工作人员在主机房内借助此模块可以控制全站仪,根据实际需要设定各项参数与处理措施,合格数据直接导入数据处理模块。测量机器人外业测量的流程为:联机、定向;对所有的监测点进行学习测量;根据主机设置参数,按照观测顺序,自动寻找目标,得出目标点精确坐标。
数据处理模块:本期数据采集完成后,即可进行监测数据的平差处理,得出监测点的监测成果,并输出工作报表,实现内外业一体化,节省了人力资源,提高了工作效率。并根据系统数据库中之前的监测数据,进行对比分析,输出成果表和变化趋势图等。
3 自动化监测系统布点方案
3.1 基准点设置
为确定系统的变形参照基准,需在影响范围之外,布设四个基准点。基准点埋设稳固,保证整个监测过程中不受破坏,基准点为整个系统提供稳定不动的参照系。基站网点采用独立坐标系统,建立与隧道平行的坐标系统,X 坐标正值为沿平行于隧道往百花岭站方向,Y 坐标正值为垂直于X 坐标往东,Z坐标正值为竖直方向向上。
3.2 监测点设置

图2 监测断面上监测点布设图
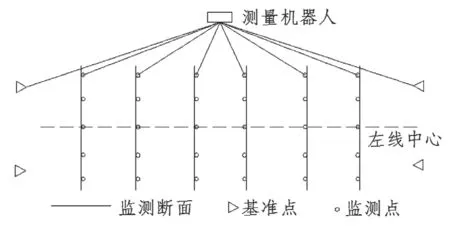
图3 百花岭站自动化监测平面布点图
变形监测点布设根据现场实际情况,结合施工对一号线的影响情况进行布设,在一号线百花岭站(ZSK28+471.413~ZSK28+510.348 段)左线约40m 范围内,共布设4 个监测断面,在影响较小的两端各延伸布设1 个监测断面,即监测断面布设的地铁里程范围为ZSK28+461.413~ZSK28+520.348,按照10m的间距设置监测断面。每个监测断面布设5 个监测点,在地铁轨道中心线两侧道床上各布设1 个沉降监测点,监测道床几何状态。在隧道顶部布设1 个沉降监测点,监测隧道变化情况。在地铁站侧墙和站台板下各布设1 个水平位移监测点,监测其是否发生位移。监测断面上点位布设位置见图2。百花岭站自动化监测平面布点图见图3。
4 自动化监测系统数据处理
实时监测数据首先进行基准网平差计算。基准网是由监测工作站和4 个基准点组成的边角交会网。获得基准网内的倾斜距离、水平角和垂直角观测数据,对基准网进行平差计算,为监测点的计算提供基准。监测点的三维坐标与上个周期监测结果的差值,即为该点的相对位移量;与起始坐标的差值,即为该点的累计位移量。
5 小结
为了确保自动化监测成果准确、可靠,应该定期进行人工复核,在车站影响范围的自动化监测断面处ZSK28+475、ZSK28+485、ZSK28+495、ZSK28+50布设4个道床人工监测点,人工复核监测频率为15 天每次。
利用自动化变形监测系统对既有地铁线进行监测,具有测量精度高、更新速度快、运行成本低,全天候作业等优点,克服了传统测量方法的缺点,为既有地铁线两侧基坑开挖提供了实时、高精度的测量数据,是同类工程的最佳选择。
猜你喜欢
煤气与热力(2022年4期)2022-05-23 12:44:56
华中建筑(2022年4期)2022-04-14 07:50:52
水利水电科技进展(2021年6期)2022-01-07 02:58:02
现代测绘(2021年1期)2021-04-28 10:19:56
水电站设计(2020年4期)2020-07-16 08:23:48
快乐作文(3.4年级)(2020年4期)2020-05-25 02:50:59
人物画报(2020年6期)2020-01-06 05:05:51
北方音乐(2018年16期)2018-05-14 08:59:23
湖南畜牧兽医(2016年3期)2016-06-05 08:37:55
全球定位系统(2010年2期)2010-07-18 03:49:58
