
天山云杉林无人机可见光影像树冠信息提取方法研究
2020-07-03 02:27:40金忠明曹姗姗
林业资源管理 2020年1期
金忠明,曹姗姗,王 蕾,孙 伟,
(1.新疆农业大学 计算机与信息工程学院,乌鲁木齐 830052;2.中国农业科学院农业信息研究所,北京 100081;3.新疆林业科学院现代林业研究所,乌鲁木齐 830052)
树冠是树木与大气进行物质和能量交换的主要场所,是最直接反映树木信息的部位,也是在遥感影像中最易被获取信息的部分[1]。通过树冠信息,可以间接估测胸径[2]、树高[3]、林分郁闭度[4]、生物量[5]等信息,也可以监测由病虫害、干旱、林火等引起的林冠变化。因此,及时准确获取树冠参数信息对森林资源经营管理、健康监测和生态系统评估等具有重要意义。
传统的森林树冠测量工作量大、周期长、效率低、易受人为主观因素影响,虽然卫星遥感是一种有效的树冠监测方式,但易受云层干扰,而且受限于空间分辨率、几何形变、时效性差等因素影响,无法满足林场等中小尺度下树冠信息被精准快速提取的需求。无人机遥感具有高空间分辨率、不受云层影响、快速灵活、可搭载多种传感器等优点,为快速获取高精度树冠信息提供了有效途径。
近10年来,在应用无人机影像提取森林关键参数方面,国内外学者开展了大量研究。对于无人机传感器数据类型而言,主要包括可见光、多光谱、高光谱、激光雷达等,其中激光雷达等主动遥感数据对森林三维参数的提取更为精准[6],但数据获取成本较高,而通过光谱信息可以有效获取植物的颜色信息和纹理特征[7],尤其是无人机可见光影像的成本相对较低,具有良好的推广应用价值[8-9]。对于无人机影像树冠信息提取方法而言,主要包括面向对象[7-8,10]、随机森林[11]、标记控制分水岭[12]、模板匹配[13]等方法,其中面向对象法充分利用了影像的纹理和形状等空间特征,较大程度上克服了传统方法基于像元而导致的光谱易混淆和混合像元等问题,随机森林法是基于决策树的新型机器学习算法,运算速度快、算法稳定,有利于提高树冠信息提取精度,从而被广泛应用。但是现有研究都是针对特定树种和立地条件的,而每个树种都有其独特的颜色和纹理信息,对于不同影像和树种没有通用的高精度提取方法。
天山云杉(Piceaschrenkianavar.tianschanica)在我国仅见于新疆地区,占新疆天然林有林地总面积的44.9%[14],是新疆山地森林中分布最广、蓄积量最大、生态功能最为重要的森林植被。天山云杉主要分布在1 770~2 800m的中海拔区域,地形复杂、交通不便,相比于传统树冠信息获取方法,遥感为快速准确获取天山云杉林树冠信息提供了有效途径,但现有研究多侧重于应用卫星遥感影像获取天山云杉林树冠信息,在流域或区域等较大尺度上估测郁闭度[6]、森林生物量[15]、碳储量和空间分布[16]等,对于适用于中小尺度的无人机影像提取天山云杉林关键参数的研究较少。因此,本研究采用无人机高分辨率可见光影像,对比分析3种主流的树冠信息提取方法(以光谱为特征空间的面向对象法、以光谱+纹理为特征空间的面向对象法、随机森林法),为天山云杉林树冠信息提取最优方法适应性选择提供参考依据,以期促进天山云杉林其他关键参数、单木生物量、森林生物量和碳储量动态监测的遥感应用水平。
1 研究区概况与研究方法
1.1 研究区概况
研究区位于新疆农业大学南山实习林场,属于天山北麓中段的乌鲁木齐南山区域,地理坐标为43°16′~44°07′N,86°46′~87°56′E,平均海拔为2 200m,年降水量为500~600mm,春夏两季降水量占全年的70%左右,年均气温达3°C,日照充足,无霜期约140d。地势南高北低,北坡、东北坡和西北坡是天山云杉主要分布区,林型以天山云杉纯林为主,在研究区西北部通过轻小型无人机采集实验数据,其地理位置如图1所示。
1.2 无人机影像数据预处理
影像数据获取于2017年11月21日,研究区地表仍有积雪覆盖,天气晴朗无云,气温为-5~1℃,能见度高,风速较小,适合无人机航拍作业。使用搭载CCD相机的固定翼无人机获取研究区天山云杉林的航空正射影像,规划航线航向重叠率为80%,旁向重叠率为60%,所获影像包括红光(Red)、绿光(Green)和蓝光(Blue)3个分量,数据格式为8bit无符号整形TIFF格式,空间分辨率为0.117 7m,数据坐标系统为WGS84,采用UTM投影。
本研究选择成像效果好、清晰、色彩饱满的遥感影像,利用Agisoft Photo Scan无人机数据处理软件进行影像拼接,使整幅拼接影像的色彩均衡、过渡自然、边界平滑,进而对整幅影像做正射处理,影像预处理结果如图2所示。由于山地地形复杂,无人机影像中一些树冠处于阳光直接照射的光照区域(简称“光照区域”),树冠颜色丰富,另一些树冠分布在被山体遮挡而未被阳光直射的区域(简称“阴影区域”),树冠颜色较为单一。
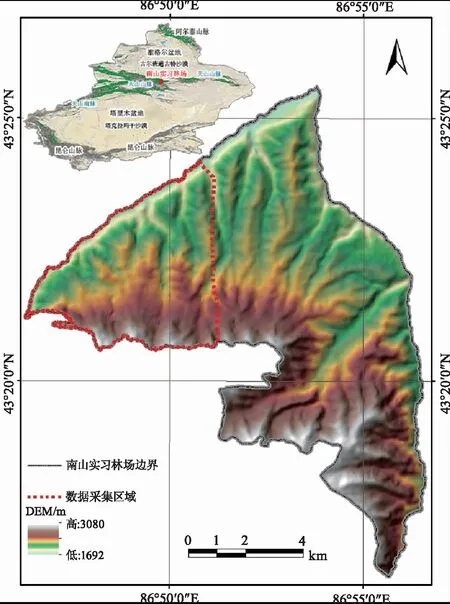
图1 南山实习林场及数据采集区域地理位置Fig.1 Geographic positionof Nanshan Internship Forest Farm and data acquisitionregional (地图来源:国家林业和草原科学数据中心、地理空间数据云平台)
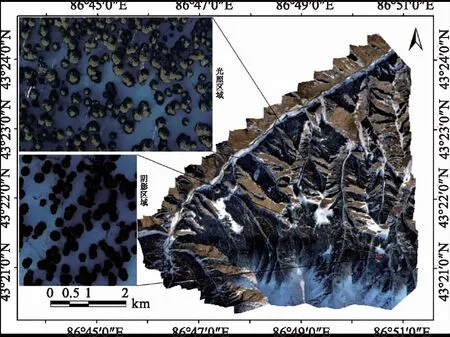
图2 无人机遥感影像预处理效果Fig.2 Pre-processing effect of UAV remote sensing image
1.3 遥感样地选择
研究区天山云杉主要分布在天山北坡中山阴坡地带,地形条件复杂。森林资源二类调查数据表明,超过95%的天山云杉分布于北坡、西北坡、东北坡和西坡,其中幼龄林占10.63%、中龄林占38.30%、近熟林占15.96%、成熟林占24.47%、过熟林占10.64%。为验证树冠提取精度,综合考虑海拔、林龄、光照条件等因素,选取16个小班,其中幼龄林1个、中龄林5个、近熟林4个、成熟林5个、过熟林1个。在小班内划定遥感样地16个,每个样地100m×100m(图3),其中海拔1 500~1 999m的5个、2 000~2 499m的10个、2500~3000m的1个;阴影区域8个、光照区域8个。同时,以目视解译出的样地内天山云杉林树冠值作为参考数据。
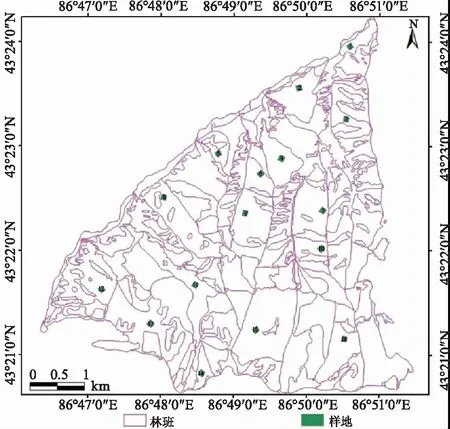
图3 样地分布Fig.3 The distribution of plots
1.4 面向对象提取法
1.4.1多尺度分割
遥感影像分割是面向对象法提取天山云杉树冠信息的关键步骤,分割结果直接关系到特征信息提取的精度,而多尺度分割过程由分割尺度、形状因子、紧致度因子和输入图层所占权重等4个参数控制。尺度(scale)参数是基于异质性最小的一种区域合并算法中的阈值,直接决定了天山云杉高分辨率影像中对象的大小和分割质量;形状因子主要调节色彩和形状分割准则的权重关系,形状因子越大,色彩因子越小;紧致度因子主要调节平滑度和紧致度分割准则的权重关系,紧致度因子越大,对象边缘的平滑度越小。
试验采用eCognition软件中的多尺度分割算法(Multiresolution Segmentation)对影像进行分割。通过固定形状因子、紧致度因子和输入图层所占权重,确定影像最佳分割尺度,利用Dragut设计的自动计算最佳分割尺度参数工具ESP(Estimation of Scale Parameter)[17]确定影像分割尺度,ESP通过计算不同分割尺度参数下影像对象同质性局部变化(local variance,LV)的变化率值ROC-LV(rates of change of LV)来指示影像分割的最佳尺度参数[18],根据公式(1)计算ROC-LV。当ROC-LV出现波峰状态的值,即局部最大值时,该点对应的分割尺度值即为最佳分割尺度。
(1)
式中:LV(L)为目标层次,即L层对象层的平均标准差;LV(L-1)则为目标层L层的下一层L-1层中对象层的平均标准差。
本研究为排除其他因子的影响,将形状因子与紧致度因子分别设定为默认值0.1和0.5,输入图层所占权重为1,利用ESP工具计算最优分割尺度,结果如图4所示。
图4中横坐标表示分割尺度参数,纵坐标分别表示LV(红色线)和ROC(蓝色线)。参考ROC局部最大值,获得最优分割尺度值为23,29,39,51,63,75,99。光照区域不同分割尺度分割效果如图5(a)—(d)所示,阴影区域不同分割尺度分割效果如图5(e)—(h)所示。从图5(a),(e)中可以看出,当分割尺度为23时,影像中无论阴影区域树冠还是光照区域树冠都被分割得过于破碎。如图5(b),(f),当分割尺度为29时,对象分割略破碎,但树冠和雪地区分良好。如图5(c),(g)和图5(d),(h),当分割尺度为39,51时,部分树冠与较暗的雪地合并,分割结果不理想。分割尺度由51至99的过程中,对象逐渐被大规模合并,不适于分类。因此,本研究将分割尺度确定为29。
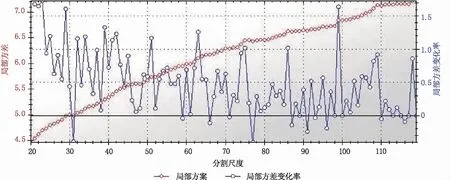
图4 最优分割尺度计算结果Fig.4 The optimal results of segmentation scale
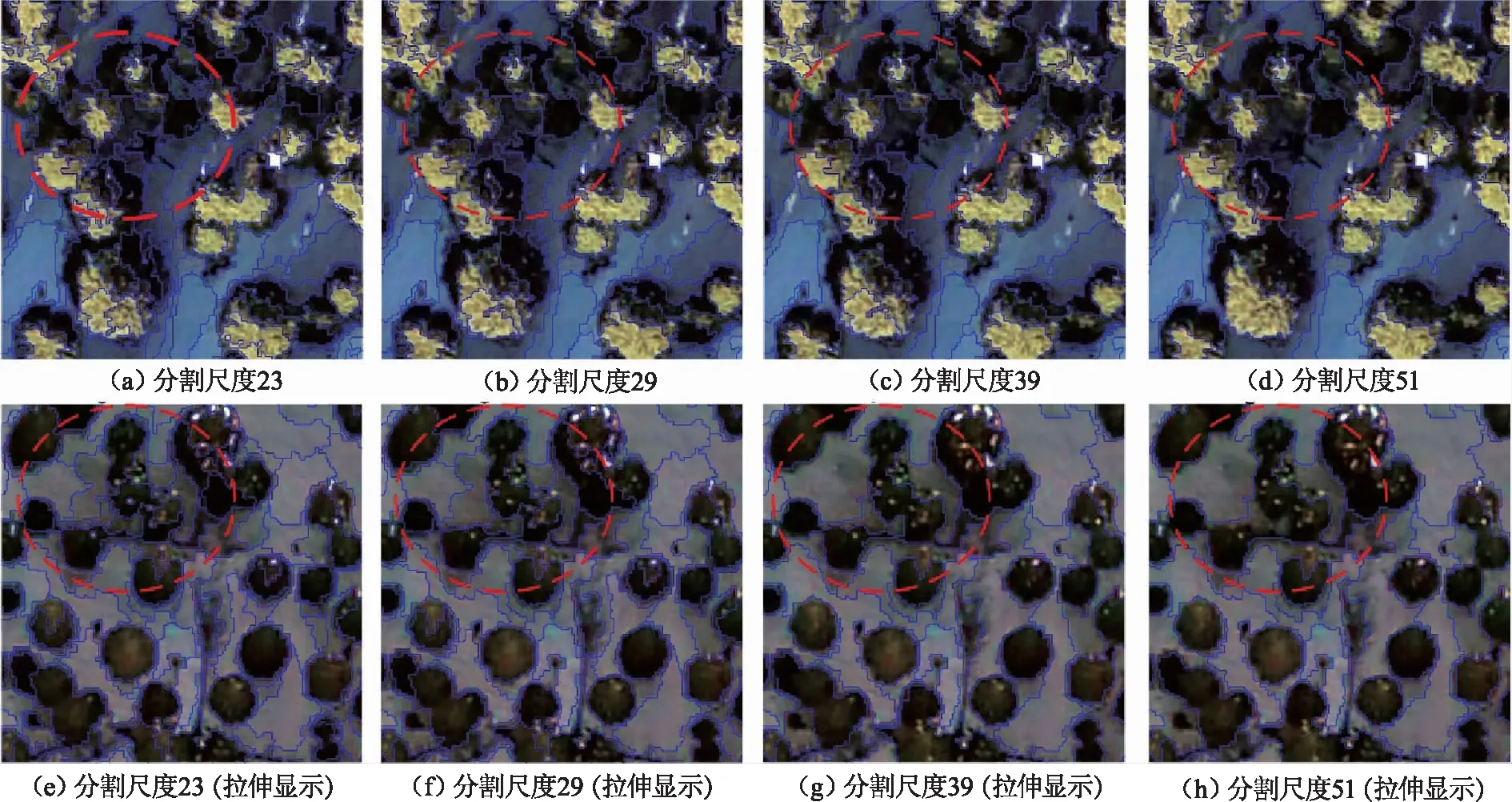
图5 不同分割尺度效果对比Fig.5 Comparison of different segmentation scales
确定分割尺度后,调整形状因子和紧致度因子进行分割实验对比,最终确定试验中分割尺度为29,形状因子为0.2,紧致度因子为0.5,各图层输入权重为1。
1.4.2对象特征提取
分割后的对象特征是提取天山云杉树冠信息的主要依据,张凝等[7]研究得出,结合光谱+纹理的特征提取方法会提高面向对象方法提取树冠信息的精度;但是毛学刚等[10]研究得出,在中小尺度分类时,纹理特征的引入会降低树冠、林隙、非林隙分类精度。因此,本研究采用以光谱为特征空间的面向对象方法和以光谱+纹理为特征空间的面向对象法,对象特征空间由光谱特征和光谱+纹理特征分别计算得到。
对于光谱特征,试验中的初始光谱特征选择遥感影像红、绿、蓝3个分量均值(Mean)、标准差(Standard deviation,StdDev)、亮度(Brightness)、波段比(Ratio)和过绿减过红指数(Excess green minus excess red index,ExG-ExR)[19]。其中:Ratio是对象在某个分量上的均值与3个分量均值的比率;ExG-ExR作为一种改进的颜色指数模拟归一化植被指数,根据公式(2)计算。
(2)
对于纹理特征,描述方法有很多种,灰度共生矩阵(Gray Level Co-occurrence Matrix,GLCM)和灰度级差矢量(Gray Level Difference Vector,GLDV)是两种应用效果较好的纹理统计分析方法。初始纹理特征选择红、绿、蓝3个分量灰度共生矩阵的平均值(GLCM Mean)、标准差(GLCM StdDev)、同质性(GLCM Homogeneity)、对比度(GLCM Contrast)、非相似性(GLCM Dissimilarity)、熵(GLCM Entropy)、角二阶矩(GLCM Angular Second Moment,Ang.2nd moment)、相关性(GLCM Correlation)以及灰度级差矢量的平均值(GLDV Mean)、对比度(GLDV Contrast)、角二阶矩(GLDV Angular Second Moment,Ang.2nd moment)、熵(GLDV Entropy)。
1.4.3面向对象分类
为避免产生冗余、增大计算量、降低分类精度等问题,进行训练样本的特征空间优化,结果如表1所示。
选择同样的训练样本,分别采用光谱特征和光谱+纹理特征两种方法提取的特征空间为依据,使用eCognition Developer软件的最近邻分类器进行树冠和非树冠分类,输出分类结果。
1.5 随机森林提取法
随机森林(Random Forest,RF)由Breiman[20]于2001年提出,是一种通过集成学习的思想将多棵树集成的算法,不需要先验知识。为保证随机森林的生成,在随机森林学习过程中需要设置决策树的株数N和完成分类所需的变量参数M两个关键参数[21]。一般而言,随机森林分类器计算效率高且不会过度拟合,可以适当增大N的取值[22]。现有研究中,多将N值设置为500,因为在达到该数量的分类树之前,分类精度已趋于稳定[23-24];M的取值目前通常为输入变量数量的算术平方根[25]。本研究的随机森林提取法在ENVI5.3中的EnMAP-Box下实现[26],为保证分类精度,将参数N设置为500,参数M设置为总特征参数个数的算术平方根。
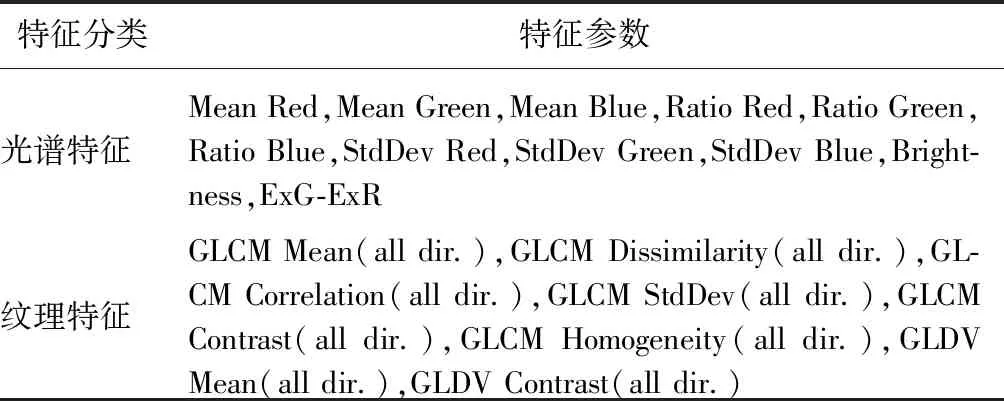
表1 特征空间优化结果Tab.1 The optimized results of characteristics space
2 结果与分析
2.1 3种方法提取的树冠信息
采用上述3种方法分别提取研究区内天山云杉林树冠信息,效果如图6所示。图6(a)—(c)分别是光照区域以光谱、光谱+纹理为特征空间的面向对象方法和随机森林方法提取效果,图6(d)—(f)分别是3种方法在阴影区域提取的效果。
为进一步比较,从16块样地中选取50株较为孤立的单木,其中阴影区域单木25株,光照区域单木25株,部分单木如图7(a)所示,目视解译出50株单木树冠面积作为参考值。以光谱为特征空间的面向对象方法提取单木树冠面积效果如图7(b)所示,以结合光谱+纹理为特征空间的面向对象方法提取单木树冠面积效果如图7(c)所示,随机森林方法提取单木树冠面积效果如图7(d)所示。
从图6和图7中可以看出,由于受树冠积雪和树冠阴影的影响,随机森林方法提取的天山云杉树冠中存在较多空洞,造成提取的树冠面积和轮廓不完整;面向对象方法很好地避免了树冠积雪对提取树冠面积的影响,但是仍会将较暗的阴影区域与树冠合并,影响提取精度。
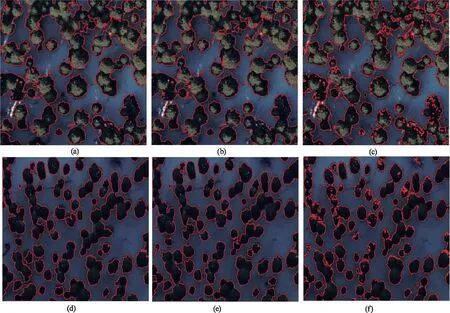
图6 3种方法提取树冠局部效果Fig.6 Partial extracted results of tree crown in three methods
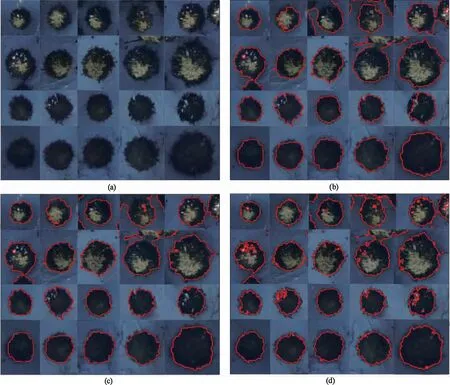
图7 3种方法提取部分单木树冠结果Fig.7 Partial extracted results of individual tree crown in three methods
2.2 林分郁闭度提取精度分析
对于天山云杉林分郁闭度而言,以研究区16块遥感样地中天山云杉树冠面积目视解译结果为参考值,计算样地郁闭度。基于公式(3),(4),对比3种方法提取林分郁闭度的精度,结果如表2所示。
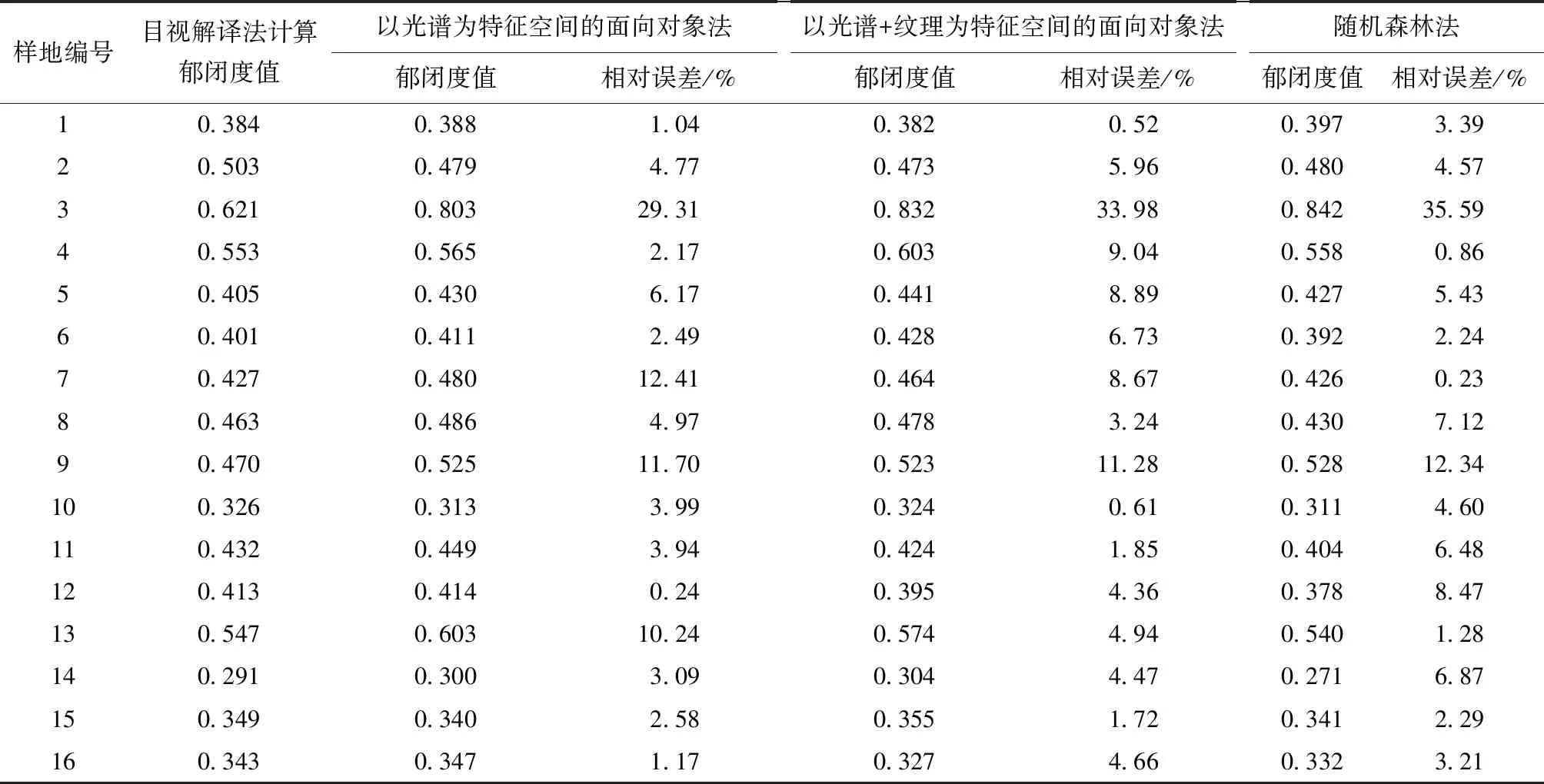
表2 3种方法提取样地郁闭度信息的误差对比Tab.2 The comparison of error of obtained plots canopy density in three methods
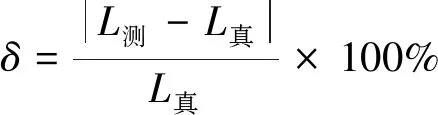
(3)
式中:δ为郁闭度提取的相对误差,L测为3种方法分别提取的郁闭度的值,L真为目视解译计算的郁闭度值。
(4)
式中:R为样地郁闭度提取精度,δi为第i个样地郁闭度的相对误差,n为样地数量。
由表2可知,当分割尺度为29时,3种方法的平均提取精度分别为93.73%,93.07%,93.44%,均高于93%,能够满足天山云杉林分郁闭度高精度快速提取要求。其中,对于面向对象法而言,以光谱为特征空间比以光谱+纹理为特征空间的提取精度高0.66%,故而加入纹理特征对提取精度可能会有负面影响。
阴影区域和光照区域对郁闭度提取精度的影响也不相同,本研究中的阴影区域样地编号为:1,2,8,11,13,14,15,16,3种方法的平均提取精度分别为96.03%,96.58%和95.6%;光照区域样地编号为:3,4,5,6,7,9,10,12,3种方法的平均提取精度分别为91.44%,89.56%和91.27%。因此,3种方法在阴影区域的提取精度均高于在光照区域。在面向对象法提取天山云杉树冠时,加入纹理特征会降低光照区域的提取精度,但会略微提升阴影区域的提取精度,效果不明显。
2.3 单木树冠面积提取精度分析
对于天山云杉单木树冠面积而言,在3种方法提取的树冠结果中选择50株单木,使用Arcgis软件计算每株单木的树冠面积,以单木树冠面积目视解译结果为参考值,对比分析3种方法的自动提取结果,具体情况如图8所示。
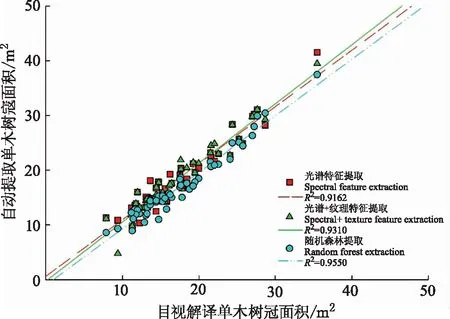
图8 3种方法提取单木树冠面积值与参考值散点图Fig.8 The scatter diagram of reference value and extracted individual tree crown area by three methods
如图8所示,自动提取的单木树冠面积与目视解译的单木树冠面积呈较强的线性关系,R2分别为0.916 2,0.931 0,0.955 0。进而将3种方法在光照区域和阴影区域自动提取的25株单木树冠面积分别与目视解译结果对比(图9,图10)。
如图9所示,在光照区域,3种方法和目视解译单木树冠面积的R2分别为0.928 9,0.915 1,0.929 5;在阴影区域如图10所示,R2分别为0.946 8,0.958 9,0.981 6。可见,对于每一种方法而言,阴影区域的提取精度均明显高于光照区域;而且无论是在阴影区域还是在光照区域,面向对象法提取的单木树冠面积均大于随机森林法。这是由于树冠上的积雪与树冠本身的光谱差异大,会减少自动提取的单木树冠面积,树冠阴影与一些树冠在纹理、光谱特征上差异不明显,会被误分为树冠,从而增加提取的单木树冠面积。随机森林法提取单木树冠时,树冠积雪和树冠阴影对所提取单木树冠面积的干扰一减一增从而相互抵消;面向对象法很好地避免了树冠积雪的干扰,但仍受树冠阴影的影响,所以表现为面向对象方法提取的单木树冠面积较大,精度反而有所降低。虽然随机森林方法提取的单木树冠面积结果与目视解译结果最接近,但是面向对象法提取的单木树冠可获得完整的闭合曲线轮廓,与实际树冠更相符。因此,对于单木树冠面积提取而言,以光谱+纹理为特征空间的面向对象法更优。
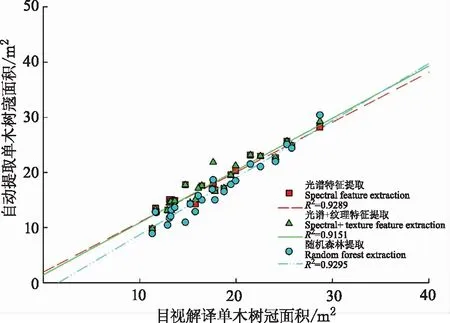
图9 光照区域3种方法提取单木树冠面积值与参考值散点图Fig.9 The scatter diagram of reference value and extracted individual tree crown area by three methods inlight region
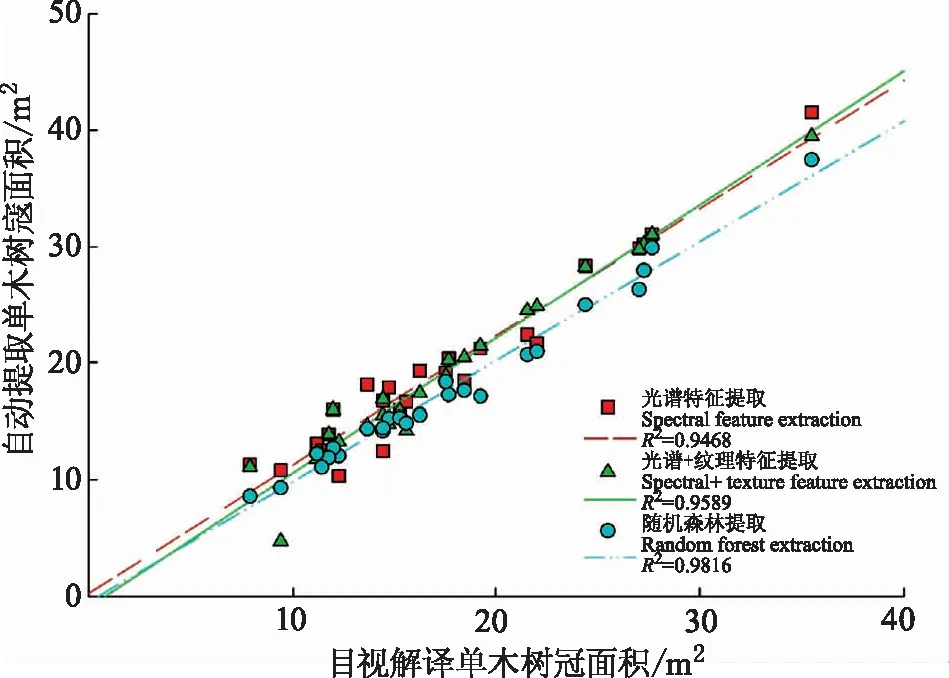
图10 阴影区域3种方法提取单木树冠面积值与参考值散点图Fig.10 The scatter diagram of reference value and extracted individual tree crown area by three methods inshadow region
3 讨论
1)基于无人机在积雪覆盖背景下获取的高分辨率天山云杉影像,3种方法提取林分郁闭度的精度均高于93%,这一结果高于姚国慧[27]基于雷达数据提取中低郁闭度天山云杉林郁闭度信息的精度79.55%,也高于李擎等[4]基于GF-2号遥感影像天山云杉林郁闭度信息的提取精度,说明无人机可见光影像提取天山云杉林树冠信息的可靠性和可行性。同时,由于受限于研究区遥感样地数据限制,本研究的16个样地郁闭度主要分布在0.6以下,总体表现为中低郁闭度林分,而当林分郁闭度高于0.6时,3种方法的提取误差明显增加,可见郁闭度的高低会对天山云杉树冠信息提取精度产生一定影响。
2)无论是天山云杉林分郁闭度还是单木树冠面积信息提取,3种方法在阴影区域的提取精度均大于光照区域。由于山地地形复杂,无人机传感器获取数据时,受太阳高度角和山体遮挡影响,影像中天然存在光照区域和阴影区域,虽然已经经过正射处理,但是在强光照区域,部分树冠的阴影会遮挡其他树冠,导致树冠信息提取精度降低。在阴影区域,树冠颜色较为一致,与积雪背景区分度良好,树冠信息提取精度反而相对较高。何游云等[5]研究建议,为避免树冠阴影的产生,应该选在多云或者阳光较弱时进行无人机遥感数据采集;李赟[9]研究表明,在天气晴朗、云量较少时进行无人机航拍,提取杨树冠幅效果良好。本试验在光照充足的天气获取无人机遥感影像,其中光照区域相当于晴天,山体阴影区域则相当于阴天。结果表明,在阴影区域的天山云杉树冠信息提取精度更高。但是,这并不意味着在阴天或者多云天气获取山地森林无人机遥感影像一定可以提升树冠信息的提取精度。因为在阴天条件下,光照本身就弱,在山体遮挡区域的树冠信息会更弱,并不利于树冠信息的提取,光照强度以多少为宜尚待进一步研究。
3)面向对象法提取林分郁闭度信息时,加入纹理特征会略微降低提取精度,这与毛学刚等[10]的研究结论一致。同时,加入纹理特征在阴影区域表现为提升精度,在光照区域反之,这是因为在最优分割尺度下,阴影区域每个树冠分割较为完整,保留了完整的纹理特征,而光照区域的天山云杉树冠颜色信息多样,被分割为多个对象,树冠的完整性被破坏,每个对象包含很少的纹理特征,加入不明显的纹理特征后,不仅使分类精度有所下降,反而大幅增加了运算时间。但值得注意的是,在单木树冠面积提取时,加入纹理特征却会提高提取精度。虽然单木样本较少,且为人工选择色彩鲜明容易辨认的单株树木,但仍旧说明纹理特征在提取天山云杉树冠其他信息中的作用不容忽视。
4 结论
基于轻小型无人机获取并预处理积雪背景下天山云杉高分辨率可见光影像,以光谱为特征空间的面向对象法、以光谱+纹理为特征空间的面向对象法和随机森林法都能够高精度、快速、自动化地提取天山云杉林分郁闭度和单木树冠面积,可以满足以天山云杉为代表的中小尺度山地森林树冠信息提取要求。对于林分郁闭度而言,以光谱为特征空间的面向对象法较优,加入纹理特征反而会降低林分郁闭度提取精度;对于单木树冠面积而言,虽然从统计指标来看,随机森林法最优,但综合树冠轮廓和纹理特征等因素分析,以光谱+纹理为特征空间的面向对象法较好。
猜你喜欢
农业工程学报(2022年14期)2022-10-19 02:24:48
地理空间信息(2021年10期)2021-11-14 10:01:12
福建林业(2020年5期)2020-03-18 08:23:02
遥感信息(2019年1期)2019-03-22 01:38:16
热带林业(2019年4期)2019-03-05 09:53:58
电子测试(2018年15期)2018-09-26 06:01:34
森林工程(2018年3期)2018-06-26 03:40:46
森林工程(2018年5期)2018-05-14 13:54:30
电测与仪表(2017年24期)2017-12-19 05:15:24
现代计算机(2016年12期)2016-02-28 18:35:25
