
天线俯仰伺服系统机电一体化仿真
2020-07-02 11:57:50谢龙彪
福建质量管理 2020年12期
谢龙彪
(江南机电设计研究所 贵州 贵阳 550000)
引言
天线俯仰伺服系统在不平衡重力矩和丝杠摩擦力等扰动力矩作用下,对伺服系统的控制精度产生了较大的影响。Matlab中控制系统仿真模型难以模拟俯仰滚珠丝杠传动、不平衡重力矩及摩擦力矩对控制精度的影响,采用ADAMS/Matlab联合仿真方法提高了天线俯仰伺服控制系统仿真的准确性。
一、天线俯仰伺服系统介绍
天线俯仰系统由转塔、电动缸(含伺服电机、减速器、螺杆、螺母和活塞杆等)和天线等组成。电动缸伺服电机输出轴经减速器带动螺杆转动,滚珠丝杠机构将螺杆的旋转运动转化为螺母的直线运动,由螺母带动活塞杆作直线运动推动天线沿下端耳轴进行俯仰起竖运动。
本天线系统用于对空中目标进行跟踪探测,由目标特性确定微波天线俯仰伺服起竖范围为0°~80°,最大跟踪角速度不小于15(°)/s,最大跟踪角加速度不小于15(°)/s2,动态跟踪误差不大于3mil。
二、天线俯仰伺服系统建模
(一)天线俯仰系统ADAMS动力学模型
在ADAMS/View中建立天线俯仰系统动力学模型,采用UG软件绘制天线俯仰系统三维结构模型,将其转换为x_t格式后导入ADAMS/View。设置天线质量为15840kg,天线耳轴方向绕质心转动惯量为27984kg.m2,电机转子转动惯量等效至螺杆端转动惯量为0.4167kg.m2。对ADAMS/View中各部件之间添加下图1所示约束关系。
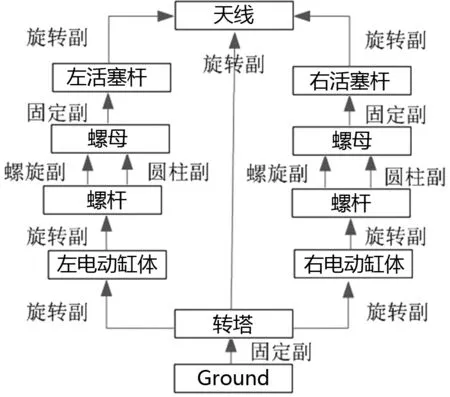
图1 天线俯仰系统拓扑结构图
滚珠丝杠当量摩擦角直接影响了传动效率,然而ADAMS/View无法对模拟滚珠丝杠的螺旋副添加摩擦力。为获得更真实的ADAMS动力学模型,在此人为对滚珠丝杠的螺旋副添加摩擦力(矩)。作用于螺杆的轴向摩擦力矩Tf和作用于螺母的径向摩擦力Ff分别如下式(1)、式(2)所示,所选滚珠丝杠螺杆直径D=66mm,升角ψ=3.56°,当量摩擦角ρ=0.86°。
(1)
(2)
(二)伺服控制系统Matlab/Simulink建模
俯仰伺服电机选为隐极式永磁同步电机,功率Pm=11.3kW,额定转速n=3000rpm,额定转矩Te=36 N·m,额定电流i=22.5A,电压常数Ke=96.74 V/krpm,转矩常数Kt=1.6 N·m/A,电机转动惯量105 kg·cm2,线电阻0.22Ω,线电感3mH。
采用id=0控制,所选永磁同步电机的等效直流电机参数为:定子电阻R=0.11Ω,定子电感L=1.5mH,电动势系数Ce=0.7543 V/rad/s,转矩系数Cm=1.1314 N·m/A,等效直流电机数学模型见式(3):
Tm=CmI
(3)
其中U——电枢电压;I——电枢电流;Tm——机动转矩。
(三)机电一体化仿真模型
使用ADAMS/Controls模块进行仿真数据交换,输入信号为螺杆驱动力矩为Te,输出信号为螺杆转动角速度和天线俯仰角度,生成adams_sub数据交换模块。在Matlab中建立下图2所示联合仿真模型,伺服控制系统采用三环控制,其中电流调节器和速度调节器采用PI调节,位置调节器采用P调节加前馈控制。

图2 天线俯仰系统机电一体化仿真模型
三、天线俯仰伺服系统机电一体化仿真结果
设置前馈参数Ka=725,位置调节器参数Kp=21750,输限幅为±300。速度调节器参数Kv=7.0531,τv=0.0105,输出限幅为±65。电流调节器参数Ki=0.9,τi=0.00735,输出限幅为±320。当天线作θ=15sin(t)+50(°)的正弦跟踪时,响应曲线及误差曲线见下图3。
由图3看出,天线俯仰伺服系统作正弦跟踪时,在第3s时刻达到稳定跟踪。动态跟踪误差不大于1mil,且在俯仰角为50°左右对应时刻动态跟踪误差最大。分析动态跟踪误差为控制系统响应相位滞后、不平衡重力矩和摩擦力矩等因素共同作用所导致。

图3 正弦跟踪响应及误差曲线
四、结束语
本文采用机电一体化仿真的方法,对天线俯仰伺服系统控制精度进行了研究。对螺杆添加反向摩擦力矩,以及对螺母添加反向摩擦力的方式解决了ADAMS中螺旋副无法添加摩擦力的问题。对天线、螺杆赋予转动惯量和质量,更真实的模拟了俯仰系统受力情况。通过三环PI调节加位置环前馈控制的方式,确保天线俯仰伺服系统动态跟踪误差不大于1mil,满足动态跟踪误差不大于3mil的要求,为天线俯仰伺服系统设计提供了依据。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 01:59:46
制造技术与机床(2019年11期)2019-12-04 05:50:26
测控技术(2018年12期)2018-11-25 09:37:44
北京航空航天大学学报(2016年4期)2016-02-27 06:32:11
深圳职业技术学院学报(2015年5期)2015-11-30 06:22:25
电源技术(2015年9期)2015-06-05 09:36:06
电测与仪表(2015年20期)2015-04-09 11:53:48
电测与仪表(2015年3期)2015-04-09 11:37:42
弹箭与制导学报(2015年1期)2015-03-11 15:32:18
机械制造与自动化(2014年1期)2014-03-01 04:21:45
