
YMD水电站机组过速保护装置的逻辑控制探讨
2020-07-01 05:47:54张瑞杰
水电站机电技术 2020年6期
张瑞杰
(新疆伊犁河流域开发建设管理局,新疆 乌鲁木齐830000)
1 基本情况
YMD水电站工程为结合灌溉发电的引水式电站,取水口经渠道引水到压力前池,通过压力钢管进入地面厂房后经尾水渠投入到原河道中。水电站采用单机单管的布置方式,钢管长度2006m,由直径4m渐变为直径2.5m的管线长9m,直径2.5m的管线长13.8m,为典型的长压力钢管引水式电站。
电站因所处地形地貌无法设置调压井,布置调压阀也存在泄水建筑物工程量较大的问题,因此,电站未设置调压井和调压阀。
电站工程等别为Ⅲ等,工程规模为中型,主要建筑物为引水渠、排冰闸、压力前池、溢流堰、泄水槽、压力管线、电站厂房、尾水渠。
电站装有3×44MW立轴混流水轮发电机组,设计引用流量3×33m3/s,年发电量6.68亿kW·h,年利用小时数:5060h。
YMD水电站从供水灌渠引水发电,且电站发电量在电力系统中的比重不大,根据SL511《水利水电工程机电设计技术规范》的规定并参照电站设计水头段,设计单位确定该电站在最大水头下机组甩100%额定负荷的蜗壳末端压力上升率≤30%,在设计水头下机组甩100%额定负荷的转速上升率≤60%[1]。
电站特征参数见表1。
2 过渡过程计算成果
电站引水系统的布置如图1所示。
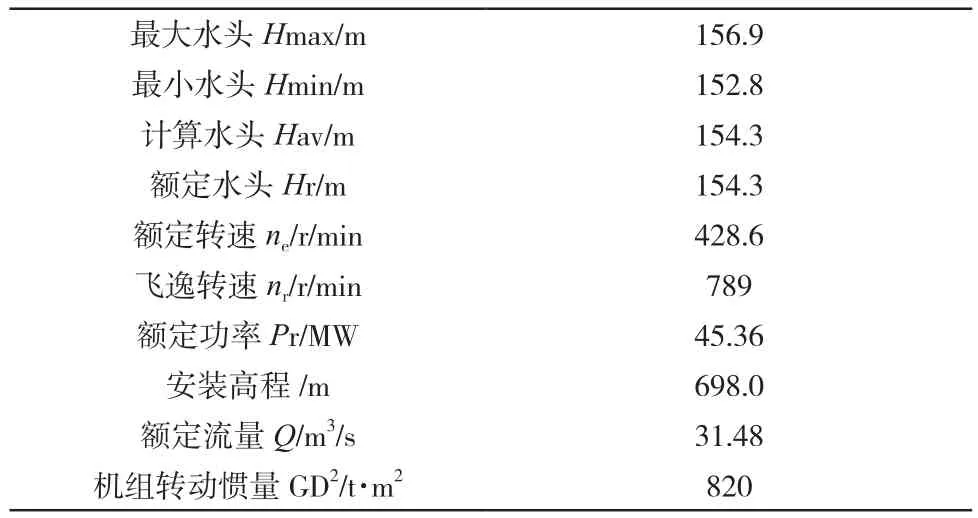
表1 电站特征参数
受建设单位委托,按照设计单位确定的蜗壳最大动水压力值≤207.3m,武汉大学对YMD引水系统大波动进行了仿真计算。计算成果如下:
当YMD电站调速器的关闭规律采用如图2所示的两段关闭规律时,蜗壳最大压力值不超过207.3m、转速上升率不超过60%,电站大波动过渡过程计算结果满足设计要求[2]。
(1)计算成果见表2。
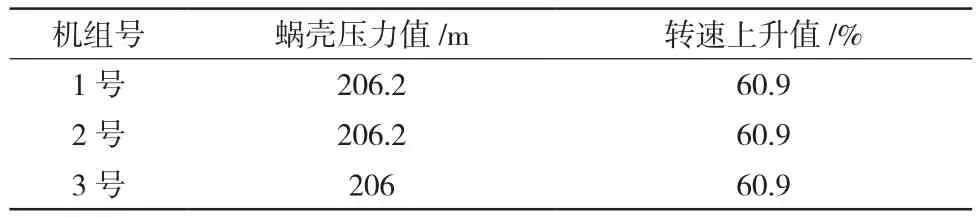
表2 大波动仿真计算成果表
(2)按照计算成果,对调速器关闭规律进行了整定,甩负荷试验成果见表3。
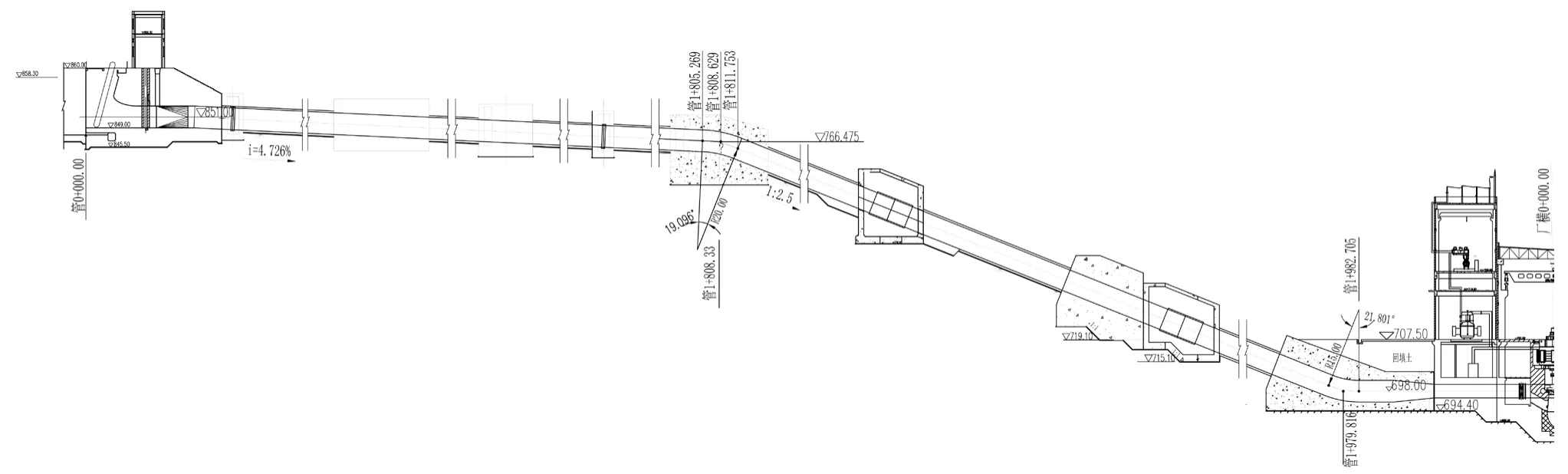
图1 引水系统压力管线布置及断面示意图
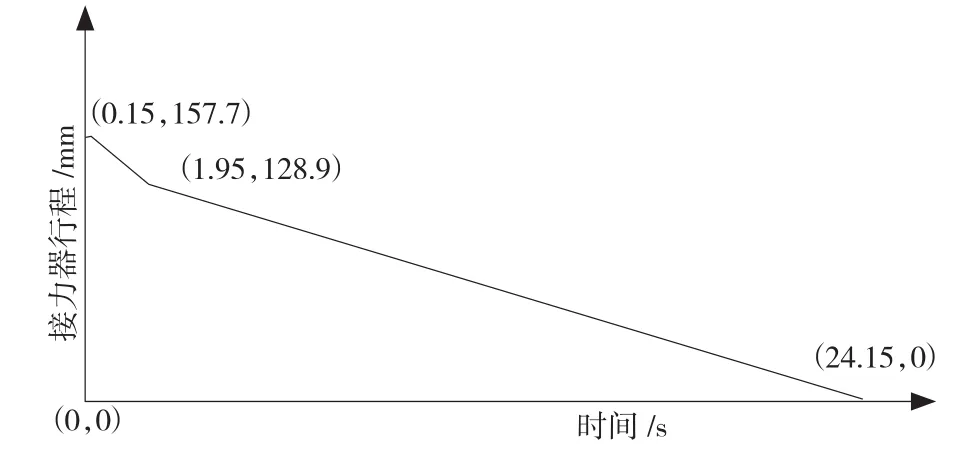
图2 导叶关闭规律示意图

表3 3台机组甩100%负荷的试验数据表
试验数据上,除1号机的数据有所偏差外(分析认为是传感器测量偏差、率定偏差),2号、3号机组的数据与计算成果十分吻合,表明电站调速器导叶关闭规律整定正确。
3 机组甩负荷过程中出现的问题
在机组甩负荷试验过程中,出现了因电气过速保护装置动作而使机组进入了事故停机流程的情况,机组停机。通常,在正常甩负荷的情况下,机组应进入空转态,并处于热备态,只有在事故甩负荷时,才进入事故停机流程,进而为停机态。经检查:在甩100%额定负荷过程中,触发了电气过速保护装置动作,计算机监控系统启动事故停机流程,造成了机组事故停机。
针对这种情况,最直接有效的办法是提高电气过速保护装置的整定值。但YMD电站机组甩100%额定负荷的最大转速上升率已达到1.593ne,如果按照电气和机械过速保护动作值的整定原则,电气过速保护应该整定为1.62~1.63ne,机械过速保护值应整定为1.64~1.65ne,但这就会产生两种不利的影响:
(1)由于电站的额定转速偏高,在甩负荷试验时现场已明显感到机组和发电机层楼板的振动很大,如果机组在1.64~1.65ne转速时触发机械过速保护装置动作并通过事故配压阀关闭导叶,机组的振动势必更大,对电站的安全运行造成严重影响,同时还应考虑此时机组是否可能会在惯性的作用下进入飞逸的情况。
(2)既然过速保护装置是在调速器故障的情况下,为保护机组安全而设置的装置,那么我们可以进行超前预判,判断调速器是否拒动,从而决定电气过速保护装置是否投入。当这种控制逻辑有效时,可以降低电气过速和机械过速保护装置的整定值,有利于机组和厂房的安全。
4 采取的技术措施
4.1 调整计算机监控系统控制流程
可以考虑对电站监控系统的控制流程进行调整。对水轮机调节系统来说,产生机组飞逸的关键因素是导水叶未向导叶关闭方向运动,因此可通过对导叶接力器的运动方向进行识别和预判,正确判断导叶接力器的运动方向,实现电气过速保护的逻辑控制。
基本原理见图3。
在上述机组甩负荷逻辑控制流程中,电气过速保护本身就是电气信号,用电气回路进行逻辑控制很容易实现电气过速保护的投入或退出,不影响本体的安全性。
4.2 参数整定
当上述的控制流程完成后,YMD电站将电气过速保护的整定值设置为1.40ne,机械过速保护整定值设置为1.61ne,可满足电站的安全稳定运行。
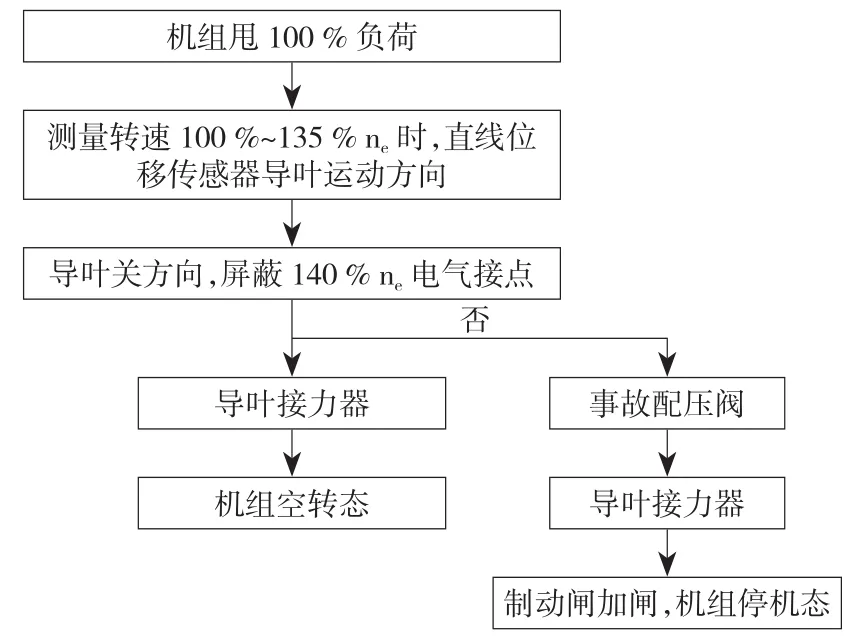
图3 机组甩负荷过程逻辑控制流程图
5 结语
(1)由于YMD电站不具备设置调压井的特殊性,装置调压阀需要建设阀室且工程布置困难,在冬季运行时需要采取保温措施,对于电站的运行和维护都存在不利因素。笔者正是考虑在这样条件下,通过改变电气保护装置投入、退出的控制逻辑,来避免机组产生在正常甩负荷情况下进入事故停机流程、造成非事故状态下的非正常停机问题。
(2)由于机械过速保护装置整定在机组甩100%额定负荷时的瞬间最大转速之后,即使电气过速保护装置失效,依然能触发并保护机组的安全。
(3)应该指出的是,水轮发电机组在进行过渡过程计算和分析时,应统筹考虑机组甩负荷时的最大瞬间转速值和电气、机械过速保护整定值的匹配原则,并根据水电站引水系统的布置特点和特征参数,合理确定机组的GD2和导叶关闭规律,以满足电站安全、可靠运行。
(4)考虑到机组振动对电站安全产生的不利影响,额定转速较高的电站,在设计上可采取提高压力上升值、降低转速升高值以减轻机组的振动。
(5)利用装置于导叶接力器上的直线位移传感器判断导叶关闭方向是上述控制逻辑能否实施的关键,也是一种新的思路。本文也仅仅是从实现控制的逻辑上进行了理论上的探讨,存在的不妥之处,敬请批评指正。
猜你喜欢
现代仪器与医疗(2021年4期)2021-11-05 08:25:06
模具制造(2019年4期)2019-06-24 03:36:50
科学与财富(2017年25期)2017-09-17 12:44:35
科技创新导报(2017年8期)2017-06-07 20:47:23
汽车维护与修理(2016年3期)2016-02-28 13:17:07
少先队活动(2014年6期)2015-03-18 11:19:18
水利水电科技进展(2014年2期)2014-10-17 03:22:10
水电站机电技术(2014年1期)2014-09-26 11:59:47
大电机技术(2014年3期)2014-09-21 06:10:40
城市轨道交通研究(2014年4期)2014-03-23 05:26:01
