
基于SVPWM矢量控制的模拟柴油机调速系统仿真研究
2020-06-27 14:05冯俊李志俊王萌高磊王浩
机电信息 2020年2期
冯俊 李志俊 王萌 高磊 王浩
摘 要:将模糊控制器与模型参考自适应控制系统相结合,组成基于模型参考的自适应模糊控制器,通过SVPWM算法,建立以柴油机为参考模型的异步电机SVPWM矢量控制系统仿真模型,并在MATLAB平台对该模型进行了仿真实验,验证了该方法的可行性。
关键词:异步电机;矢量控制;SVPWM技术
0 引言
在实验室条件下,为了研究柴油发电机在不同负载下的输出特性,可采用一定的控制算法通过控制交流异步电机带动发电机工作。本文提出了一种基于SVPWM矢量控制技术的柴油机调速系统,可实现对异步电动机的控制,使其达到与柴油机相同的输入输出特性。
1 模糊自适应控制器的设计
1.1 基于模型参考的自适应模糊控制系统
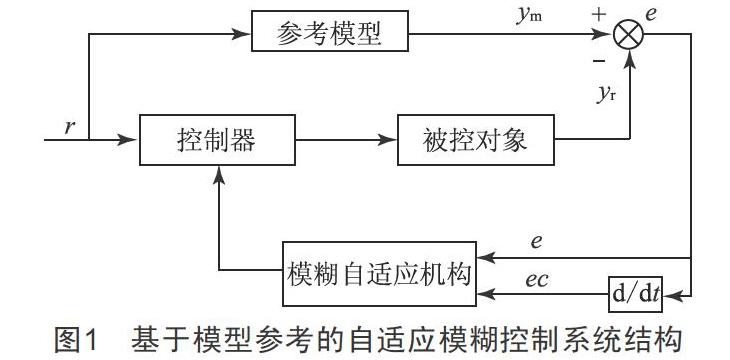
将模糊控制器与模型参考自适应控制系统相结合,组成基于模型参考的自适应模糊控制器,其系统结构如图1所示。
在每个采样周期中,整个系统通过计算参考模型的输出ym与实际输出yr的差值e以及差值的变化率ec,利用模糊控制算法得到控制器参数调整量,对被控对象控制器参数加以修正,随着模糊自适应机构内模糊控制算法的调整,不断减小差值e,最终使得实际输出无限趋近于参考模型的输出。
1.2 模糊自适应控制器的设计
如图1所示,模糊自适应控制器以柴油机调速系统和异步电机调速系统的输出差值e与差值的变化率ec作为输入,通过模糊规则实现控制器参数的整定与更新,使系统达到理想状态。
2 基于SVPWM的矢量控制系统
2.1 系统结构
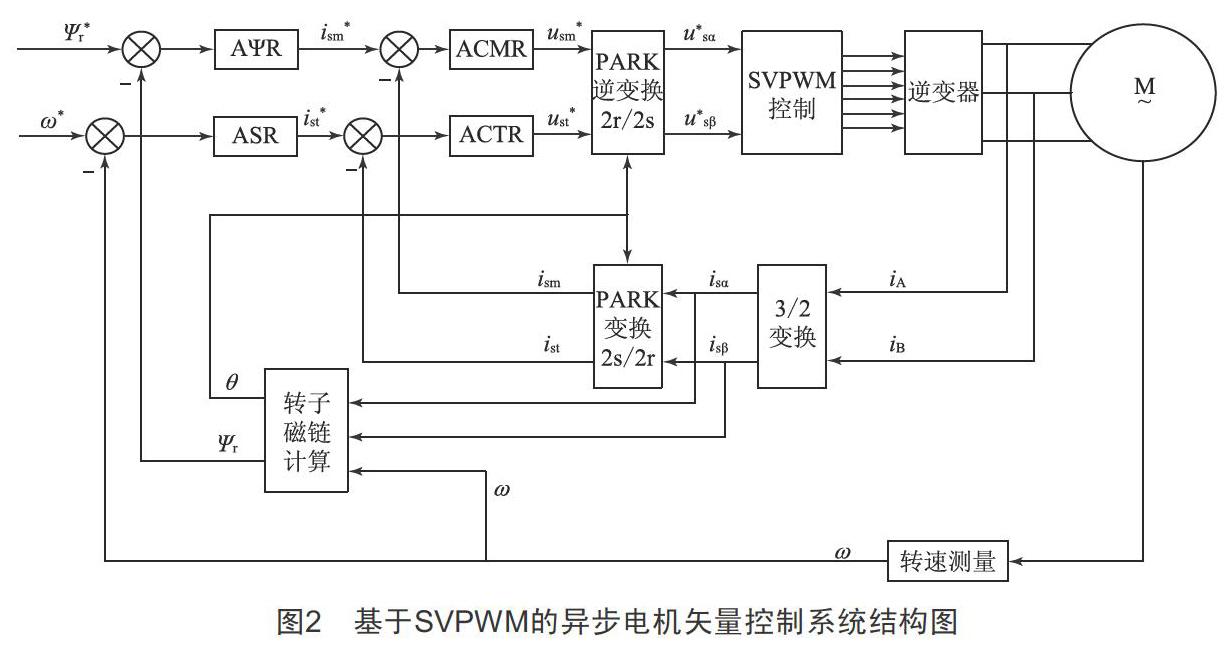
本文采用带转速传感器的转速、电流双闭环的矢量控制系统研究异步电机调速系统,如图2所示。对检测得到的异步电机三相交流电流iA、iB、iC(实际只用检测两相)进行3/2变换后,转换成在α-β坐標系上的交流电流isα、isβ,然后通过2s/2r变换,变换成在m-t坐标系上的直流电流ism、ist,实现转速与磁通的独立控制。定子电流励磁分量调节器ACMR和定子电流转矩分量调节器ACTR均采用PI调节器构成电流闭环控制。电流调节器的输入为电流的差值,输出为定子电压给定值u*sm、u*st,经过2r/2s变换得到α-β坐标系下的定子电压给定值u*sα、u*sβ,然后利用SVPWM技术控制逆变器的开关导通状态,控制电机调速。最后将电机的输出转速ω与给定的转速ω*的差值作为转速调节器ASR的输入,构成闭环控制;同时将通过计算得到的转子磁链ψr与给定的转子磁链ψ*r的差值作为转子磁链调节器AΨR的输入来实现转子磁链的闭环控制。
2.2 SVPWM算法实现
当定子绕组通入三相正弦对称电压时两轨迹重合,此时磁链圆的转速即为电机的同步转速,空间电压矢量Us的模us即为相电压的幅值,角速度即为正弦波的角频率。对于SVPWM的调制,是以α-β坐标系的电压usα、usβ和PWM波的周期为输入,主要计算过程如下:
2.2.1 判断空间电压矢量所在扇区
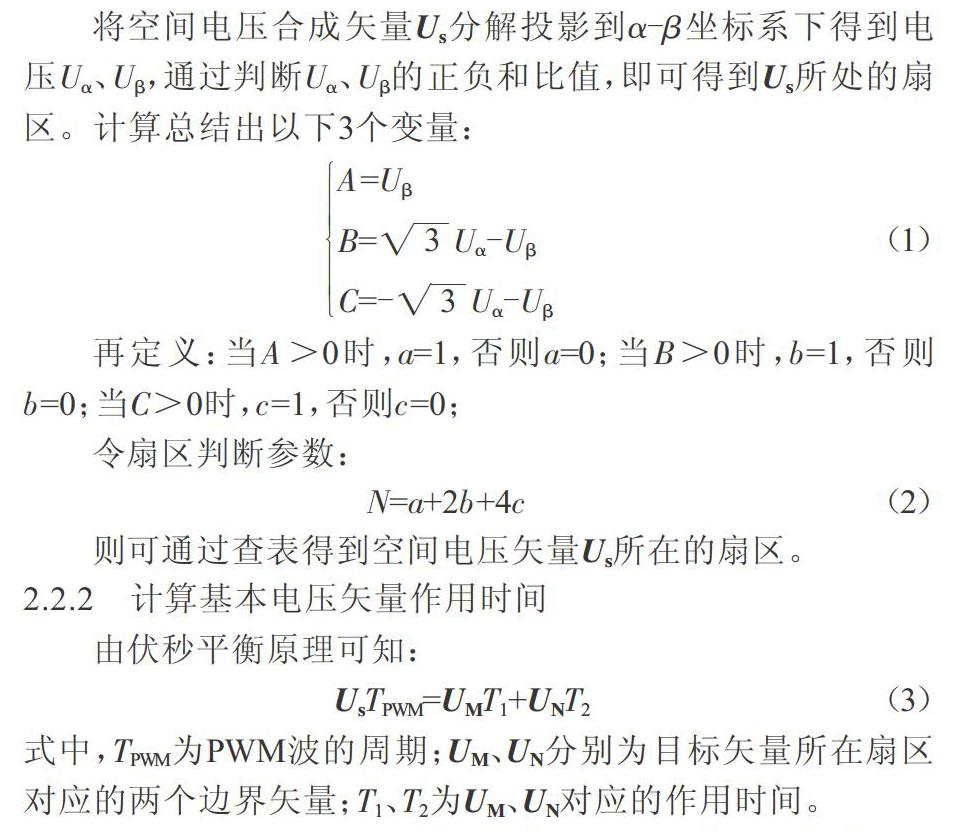
将空间电压合成矢量Us分解投影到α-β坐标系下得到电压Uα、Uβ,通过判断Uα、Uβ的正负和比值,即可得到Us所处的扇区。计算总结出以下3个变量:
A=UβB=Uα-UβC=-Uα-Uβ(1)
再定义:当A>0时,a=1,否则a=0;当B>0时,b=1,否则b=0;当C>0时,c=1,否则c=0;
令扇区判断参数:
N=a+2b+4c(2)
则可通过查表得到空间电压矢量Us所在的扇区。
2.2.2 计算基本电压矢量作用时间
由伏秒平衡原理可知:
UsTPWM=UMT1+UNT2(3)
式中,TPWM为PWM波的周期;UM、UN分别为目标矢量所在扇区对应的两个边界矢量;T1、T2为UM、UN对应的作用时间。
由矢量合成及正弦定理推导出不同扇区对应的作用时间如表1所示。
其中:
X=UβY=Uα+UβZ=Uα+Uβ(4)
为了保证每个周期内的作用时间相等,需配合零矢量使总的作用时间恒定,即在一个完整的TPWM周期中,TPWM=T1+T2+T0;若作用时间T1+T2>TPWM,则取T1′=,T2′=。其中,T0为零电压矢量的作用时间。
2.2.3 PWM波形及空间电压矢量的分布
在计算了所在的扇区和作用时间后,还需安排其分布与作用顺序。
对不同的扇区,3对晶体管的开关时间不同,因此会得到不同的空间矢量。3对晶体管的开关时间可由表2和式(5)计算得到。
其中:
TA=TB=TA+TC=TB+(5)
将计算出的矢量切换时间tcm1、tcm2、tcm3与三角波进行比较后即得各个扇区SVPWM的波形时序。
3 系统仿真与结果分析
为了使异步电机能表现出与柴油机一致的输出特性,将柴油机调速系统作为参考模型,异步电机调速系统作为被控对象,以柴油机调速系统和异步电机调速系统输出转速的差值作为模糊自适应机构的输入信号,通过控制模糊自适应机构的控制算法,实现异步电机调速系统对柴油机调速系统的模拟跟随。在MATLAB/Simulink平台上建立了基于柴油机模型参考的异步电机矢量控制系统的仿真模型。
对不同工况下系统的输出转速进行分析,曲线图中实线表示柴油机参考模型调速系统的输出曲线,虚线表示异步电机矢量控制系统的输出曲线,仿真结果如下。
3.1 突增突降给定转速
设定初始给定转速为1 500 r/min,待控制系统稳定运行后,在8 s时突降给定转速为1 000 r/min,15 s时突增给定转速为2 000 r/min,仿真结果与对比如图3所示。
当给定转速突增或突降时,整个控制系统的输出与柴油机参考系统的输出差异不大,异步电机控制系统稳定时间也与柴油机参考系统相近,整个控制系统的输出都能快速响应,紧跟参考系统调节自身转速,并能在新的给定转速下保持稳定状态。
3.2 突加突减对称给定负载
在额定转速下,待控制系统稳定运行后,在10 s时先突加100%负载,15 s时再突减100%负载,系统仿真结果与对比如图4所示。
当突加负载或突减负载时,整个控制系统的输出都能紧跟柴油机参考系统的输出,并能在较短的调整时间内重新达到给定转速值。
仿真结果表明,该系统的输出转速与柴油机调速系统输出转速基本相同,符合预期结果。
4 结语
本文结合SVPWM矢量控制技术,实现了对异步电动机的控制,并在MATLAB平台对该模型进行了仿真实验,验证了该方法的可行性。该模拟系统不仅能运用于自行火炮辅机电源及电气管理控制系统中,还为其他需要柴油机参与的研究提供了思路,笔者也将在相关领域继续研究,以求进一步提出新的研究设想与方法。
[参考文献]
[1] 韦佳辉,陈国光,王波,等.现代自行火炮系统的特点与发展展望[J].机械工程与自动化,2015(2):223-224.
[2] 田涛.内燃机车用高强化柴油机现状分析及发展前景[J].机电信息,2016(6):104-105.
收稿日期:2019-12-03
作者简介:冯俊(1994—),男,湖北人,研究方向:智能控制理论与应用。
