
适应4编组的商用巴士制动系统研究
2020-06-26 06:24陈智毛金虎艾正武姜俊超
机电信息 2020年6期
陈智 毛金虎 艾正武 姜俊超
摘要:介绍了4编组商用巴士制动系统的特点,详细描述了4编组商用巴士制动系统的组成、控制原理、故障导向,并针对制动系统给出了详细的控制方法以及地面调试的实验数据和结论。
关键词:4编组商用巴士;制动系统;控制原理;故障导向
0 引言
4编组商用巴士作为一种介于轨道交通和常规公交之间的新型运营系统,利用现代公交技术配合智能轨道交通的运营管理,使传统的公交系统基本达到轨道交通的服务水平,其投资及运营成本较轨道交通低,接近常规公交。
现在一般的商用巴士一般在2节车厢以内,长度不超过18 m;而4编组商用巴士采用双司机室,由4节车厢组成,长38 m,目前市场上还没有成熟的4编组商用巴士制动系统。为保证整车制动的安全性和舒适性,让制动响应时间和制动同步性等参数达到《机动车运行安全技术条件》(GB 7258—2017)标准要求,必须进行适应4编组的商用巴士制动系统研究。
1 制动系统的组成
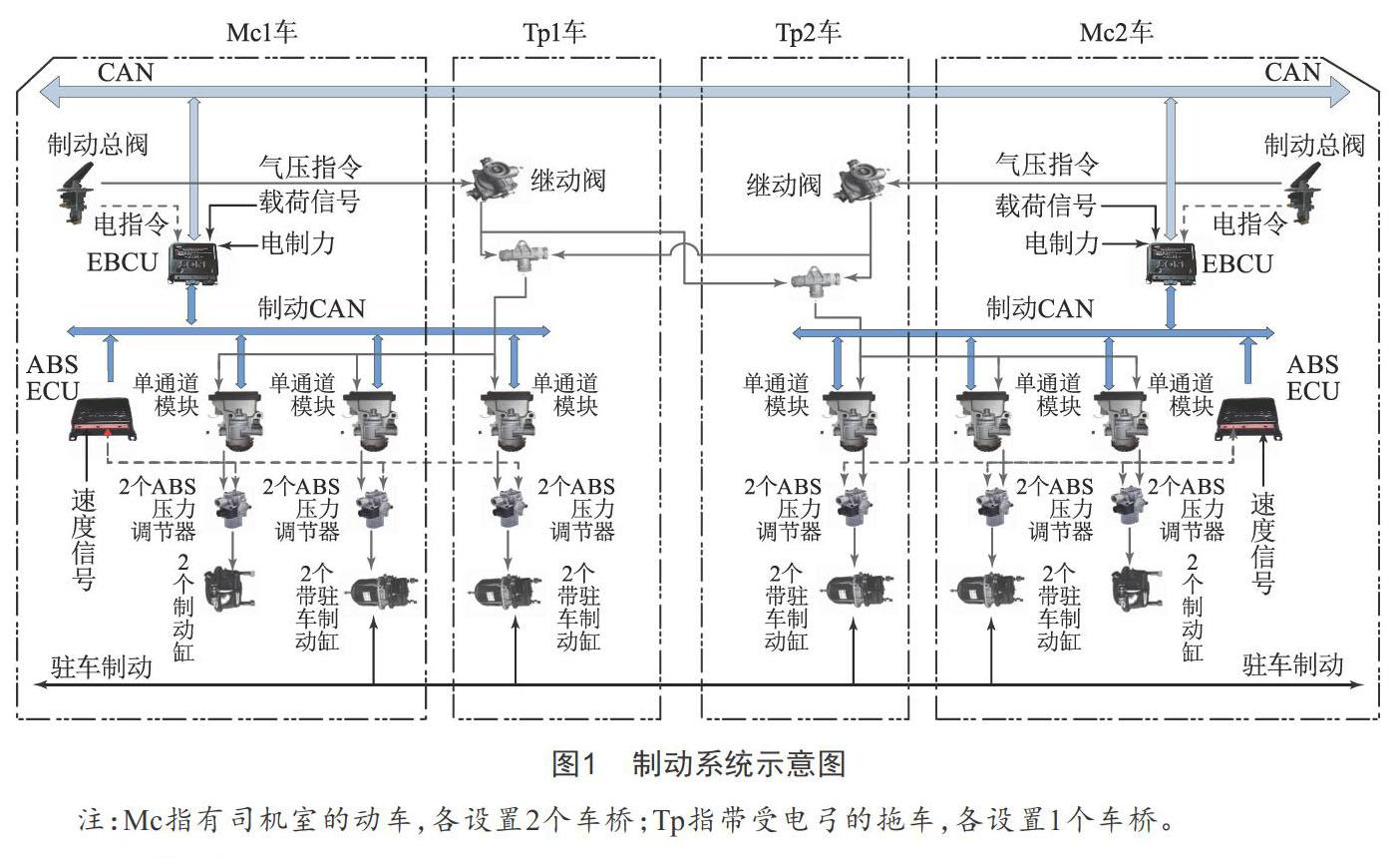
如图1所示,4编组商用巴士制动系统主要由电空回路和纯气控回路组成。两端司机室位置下方各设置一个制动总阀,制动总阀输出两路电制动指令和压缩空气制动指令(其中电制动指令作为主控,压缩空气制动指令作为备用控制),来实现行车制动控制。
1.1 电空回路
电空回路主要由2件制动总阀、2件制动ECU、整车CAN网、制动CAN网、6个桥控模块等组成。
1.1.1 制动总阀
制动总阀根据行程输出两路PWM信号和两路压缩空气。两路PWM信号互为冗余,并同时输出给所在车端的ECU;压缩空气输出给继动阀进行加速,保证压力同步传递给6个车桥的桥控模块。制动总阀符合《机动车运行安全技术条件》(GB 7258—2017)的要求。
1.1.2 制动ECU
制动ECU根据制动总阀输出的PWM信号和载荷信号计算各车桥所需制动气压,并将指令通过制动CAN网传输给桥控模块,进行整车的制动、缓解控制。同时,ECU接收机动车两端的钥匙开关、整车电制力和零速等信号作为控制输入信号。
1.1.3 整车CAN网
整车CAN网贯穿整车,采用通信率为250 kbit/s的CAN网络,连接整车牵引、转向等各系统关键单元,两端的制动ECU挂在车辆总线上。
1.1.4 制动CAN网
整列车有两个独立的制动CAN网,Mc1车和Tp1车内的制动ECU、桥控模块、ABS ECU组成一个制动CAN网;Mc2车和Tp2车内的制动ECU、桥控模块、ABS ECU组成另一个制动CAN网。
单独设置制动CAN网,这点与普通商用车不同。因为4编组商用巴士的车辆特征,牵引、转向等各功能设备和车身长度导致整车CAN总线长度已接近60 m,而商用车的CAN网络一般建议长度为不超过50 m。制动系统作为保证安全的关键设备,单独设置两个制动内部CAN网缩短了内部通信电缆的长度,能更好地保证制动内部各部件通信质量。
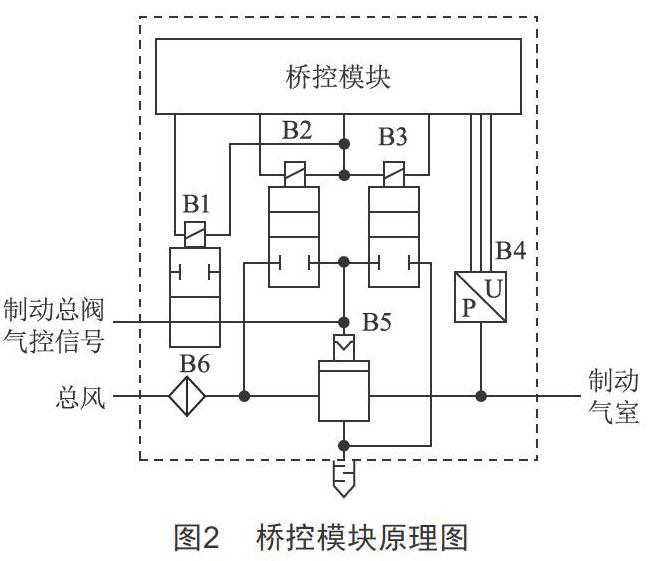
1.1.5 桥控模块
桥控模块集成了电控EP控制组件(包括B2、B3高频电磁阀和B4压力传感器)、B1电磁阀和B5继动阀,桥控模块根据制动ECU发出的指令控制B1电磁阀选择电空回路或纯空气通路(图2)。正常制动工况,ECU控制桥控模块导通电控EP控制通路,进行制动和缓解;纯空气通路此时处于热备状态;B5继动阀对电控EP控制通路或纯空气通路的压力进行加速后输出给ABS压力调节器。
1.1.6 ABS ECU、ABS压力调节器
在单通道模块与制动器之间设置ABS防滑阀,由EBCU通过ABS防滑阀来控制最终输出给制动器的压力。ABS防滑功能满足《机动车和挂车防抱制动性能和试验方法》(GB/T 13594—2003)的要求。
1.2 纯气控回路
纯空气模块主要由2件制动总阀、4件继动阀、6件双向阀、6件桥控模块等组成,其中制动总阀和桥控模块是电空回路和纯气控回路共用。
1.2.1 继动阀
继动阀对制动总阀的压缩空气输出进行加速,减少车身长度对压缩空气传输时间的影响,保证各车桥制动压力同时施加。
踩下制动总阀时,制动总阀的输出气压作为继动阀的控制压力输入,在控制压力作用下,将进气阀推开,于是储气筒内的压缩空气直接通过继动阀进气口向双向阀进行充风,加速了纯空气通路的充气过程。
1.2.2 双向阀
车辆两端制动总阀的空气压力经双向阀比较后,取大输出给桥控模块的制动总阀气控信号口。当桥控模块选择纯空气通路时,桥控模块内的继动阀对制动总阀气控信号口进行加速输出给各车桥的制动气室。
2 控制原理
2.1 电空控制原理
整车发送占用端钥匙开关信号至制动ECU,制动系统激活并向占用端制动总阀供电。制动总阀将踏板的角度转换为PWM信号输出至占用端制动ECU,并通过整车CAN网络将制动指令传输给非占用端制动ECU。
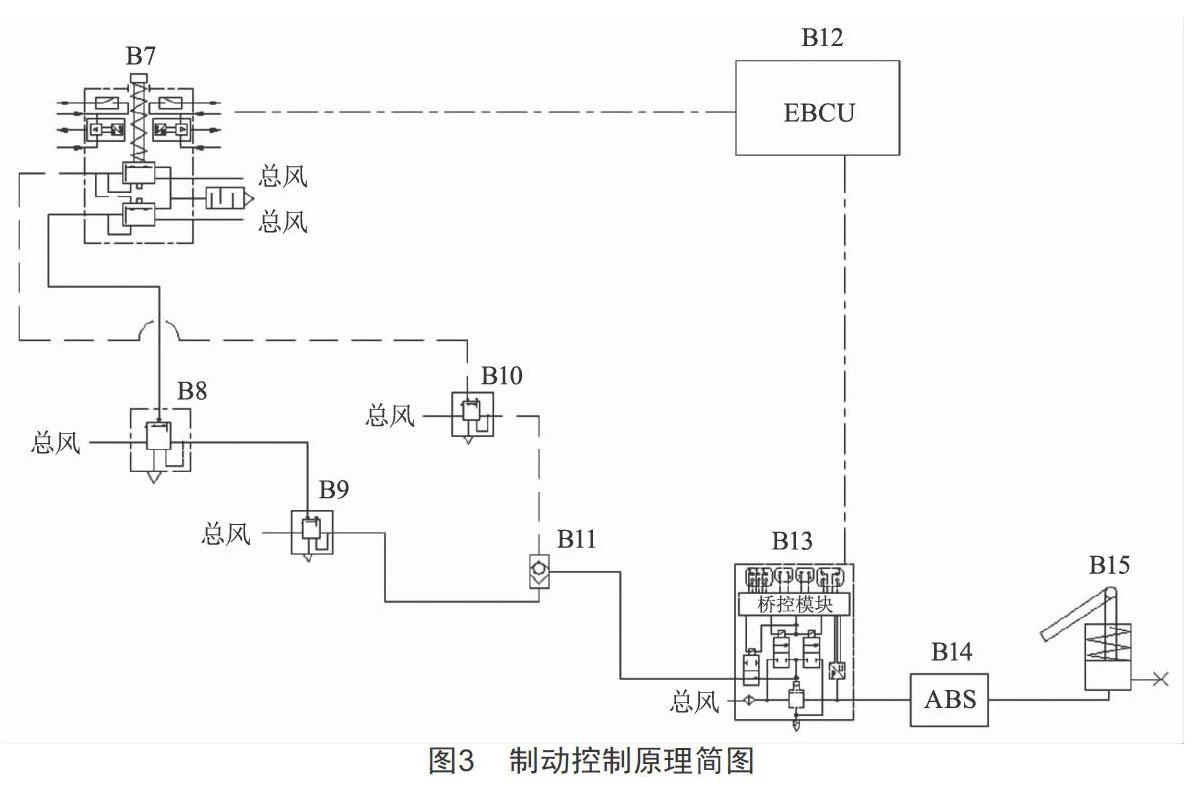
制动ECU收到指令后,根据减速度、载荷和电制力计算各车桥所需制动气压后,通过各自所在制动CAN网将制动压力需求信号传輸给桥控模块。以一根桥的制动控制原理简图为例(图3),桥控模块收到制动ECU的指令后,控制B2、B3高频电磁阀和B4压力传感器精确控制压力;控制压力通过B5继动阀加速后,对B15制动气室进行充排气。同时,桥控模块每个桥输出的压力信号反馈给制动ECU,由制动ECU监控各车桥控模块的制动状态。
制动ECU通过同样的方式控制所有桥控模块的动作,保证各车桥制动的同步性和一致性。同时制动ECU能独立控制各车桥的制动压力施加,可以根据车辆性能特性调整各车桥制动压力,更好地控制车辆制动的平稳性和舒适性。
2.2 纯空气控制原理
当电空制动故障,制动系统切换到纯空气控制模式。制动总阀根据踏板的角度输出两路独立的气压,互相作为冗余备份。以图3一根桥的制动控制原理简图为例:
制动总阀第一路压缩空气指令输出给B8继动阀控制口,B8继动阀将气压指令进行加速后输出给B9继动阀,B9继动阀对气压指令进行加速后输出给B11双向阀。
制动总阀第二路压缩空气指令输出给B10继动阀控制口,B10继动阀对气压指令进行加速后输出给B11双向阀。
B9和B10继动阀的输出气压经B11双向阀比较后取大输出给各车桥的桥控模块,桥控模块切断电空EP控制通路,导通纯空气制动通路,纯空气制动指令经B5继动阀加速后输出给B15制动气室。
制动总阀通过同样的方式控制所有车桥的纯空气制动,保证在纯空气控制通路下各车桥制动的同步性。同时纯空气控制通路的双冗余模式提高了整套系统的安全系数,提高了系统的可用性。
2.3 ABS控制原理
在車辆制动时,ABS ECU实时监测每个车轮的速度信号。当检测到车轮抱死时,ABS ECU发送信号给制动ECU,制动ECU切断所有桥控模块的电源,打开纯空气控制通路,B15制动气室的压力完全由ABS压力调节器控制,使车轮不被抱死,处于滑移率20%左右的边滚边滑状态,以保证车轮与地面的附着力在最大值,减少制动距离。
3 故障导向
正常制动或缓解时,制动总阀将踏板的电信号输出至制动ECU。当制动ECU检测到某个桥控模块故障时,制动ECU切断故障的桥控模块电源,桥控模块B1电磁阀失电后切断故障桥的电空EP控制通路,导通故障桥的纯空气制动通路进行制动和缓解;并将故障信号反馈给VCU显示在人机界面上,提示司机车辆制动部分故障,需采取相应措施。
当VCU检测到制动ECU故障时,VCU切断制动系统电源,制动系统自动切换到纯空气制动模式,所有桥控模块B1电磁阀失电后切断电空EP控制通路,导通纯空气制动通路。
制动ECU和整车VCU的双重生命信号监测,从整车CAN网和制动CAN网两个通道进行整车制动的安全保障,让制动系统更可靠、更可控。
4 验证
GB 7258—2017标准要求制动响应时间(即急踩制动时,从脚接触制动踏板时起至机动车制动力达到最大制动力75%的时间)≤0.8 s;整车最不利制动轴制动动作滞后于最有利制动轴的制动同步动作时间≤0.2 s;制动缓解时间(从松开制动踏板到制动消除所需要的时间)≤1.2 s。
为全面地进行此套制动系统的试验,我们模拟整车管路布局,搭建1:1制动系统地面联调试验台进行制动性能测试。该试验台的时间采集精度为10 ms,压力采集精度为±0.2%,测试数据如图4所示。根据图4实测制动曲线可得,最不利轴(实测为1桥)制动响应时间为0.646 s;制动和缓解时,同步时间最大为0.117 s;制动缓解时间为1.161 s。
测试结果表明,适应4编组的商用巴士制动系统的主要性能能够满足车辆的设计要求及GB 7258—2017标准要求。
5 结语
4编组商用巴士制动系统的设计,在功能上既能够满足紧急情况下的行车制动响应时间要求,确保行车制动安全;也能够满足非紧急制动情况下各车桥制动压力的独立精确控制,兼顾了驾驶员和乘客的制动舒适性;同时通过制动系统的故障安全导向,设置了电空制动回路和纯空气制动回路的自动切换,保证了整车的可用性。
[参考文献]
[1] 程伟涛,陈丰超.EBS电子制动控制系统[J].汽车与配件,2010(43):64-65.
[2] 罗文发.电子控制制动系统EBS在牵引车上的应用[J].商用汽车,2008(6):126-128.
[3] 机动车运行安全技术条件:GB 7258—2017[S].
收稿日期:2020-01-07
作者简介:陈智(1988—),男,湖南衡阳人,工程师,从事机车和城轨车辆制动系统的研发工作。
猜你喜欢
环球时报(2022-07-11)2022-07-11
中国典型病例大全(2022年11期)2022-05-13
中国慈善家(2021年5期)2021-11-19
重庆与世界(2020年7期)2020-08-04
中国信息化周报(2019年8期)2019-03-27
小天使·一年级语数英综合(2019年2期)2019-01-10
考试周刊(2017年74期)2018-01-30
山东工业技术(2017年17期)2017-09-13
汽车科技(2017年2期)2017-05-11
学苑创造·A版(2009年6期)2009-12-07
