基于图像处理的车辆目标检测系统
2020-06-23 09:36郑子秋范荣周擎苍
科技创新与应用 2020年19期
郑子秋 范荣 周擎苍

摘 要:相对于传统的车位目标识别技术,文章采用了基于图像处理的目标检测方法。实验中训练和测试的数据来自国际公开数据集PKLot,文章采用基于方向梯度直方图(HOG)和支持向量机(SVM)对正负样本集提取特征并生成模板,对待检测的图像提取出特征并与模板进行对比,最后用矩形框标识检测的车辆目标,经多次独立测试,可用车位的检测准确率在94%以上,试验过程中,测试了大约35万张车位图像,包含四个场景下的不同停车场图像,验证了设计流程的可行性。
关键词:目标检测;图像处理;室外停车场
中图分类号:TP391 文献标志码:A 文章编号:2095-2945(2020)19-0036-04
Abstract: Different from the traditional parking target recognition technology, this paper adopts the target detection method based on image processing. The data trained and tested in the experiment come from the international open data set PKLot. This paper uses Histogram of Oriented Gradient (HOG) and Support Vector Machine (SVM) to extract features from positive and negative sample sets and generate templates, extract features from the detected images and compare them with templates, and finally uses rectangular boxes to identify the detected vehicle targets. After many independent tests, the detection accuracy of available parking spaces is more than 94%. About 350,000 parking images are tested, including different parking images in four scenes to verify the feasibility of the design process.
Keywords: target detection; image processing; outdoor parking lot
引言
近年来我国汽车数量飞速增长,停车难问题日益突出,为了解决日益凸显的交通问题,结合电子传感、计算机科学等技术,建立了智能交通系统(Intelligent Transportation System,ITS),车位识别系统是智能交通系统的一个重要组成部分。传统采用地感线圈、红外线、超声波[1]等方式进行智能车位识别,优劣势如表1所示。
基于图像处理的车位检测方法具有信息量大、硬件成本低而且无须开挖路面等优点。相比于传统的传感器监控方法,采用基于图像处理的方法只需要少量摄像头就可同时监控多个车位,大大节省了停车场管理成本,后期也可以在地圖APP中加入可用车位的显示模块,引导车主停车,提高车主的停车效率,对于推进相关的研究以及提高交通信息化水平有十分重要的意义。
1 目标状态检测系统结构设计
本文以实际应用场景中的停车场图像为主要研究对象,研究室外环境下车位状态识别算法,进而对室外停车场可用车位进行检测。基于图像处理的目标识别基本流程为:图像数据获取、图像预处理、特征提取变换、分类器选择以及分类决策[2]。
1.1 数据获取
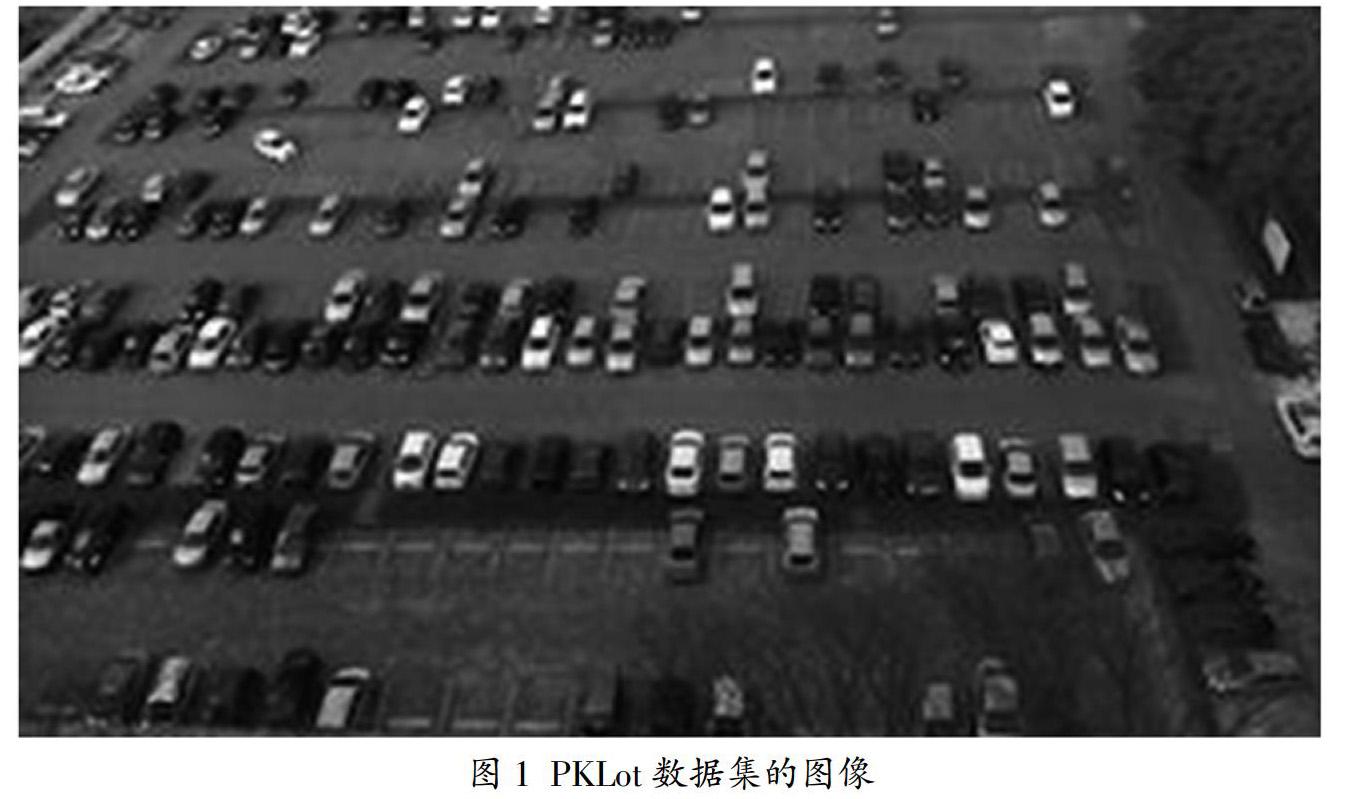
PKLot数据集是计算机视觉、模式识别和智能交通领域公开测试的基准数据之一,发布于2015年,图像拍摄的天气环境包括阴天、阴雨以及晴天等[3]。该数据集一个由PUCPR行政大楼前的图片组成,一个由UFPR组成,由于拍摄角度不同,UFPR又分为UFPR04和UFPR05两个数据子集,该数据集被作为可用空车位检测的基准数据集之一。[4]本实验采用了PKLot数据集对车位状态识别算法进行试验验证。
1.2 图像预处理
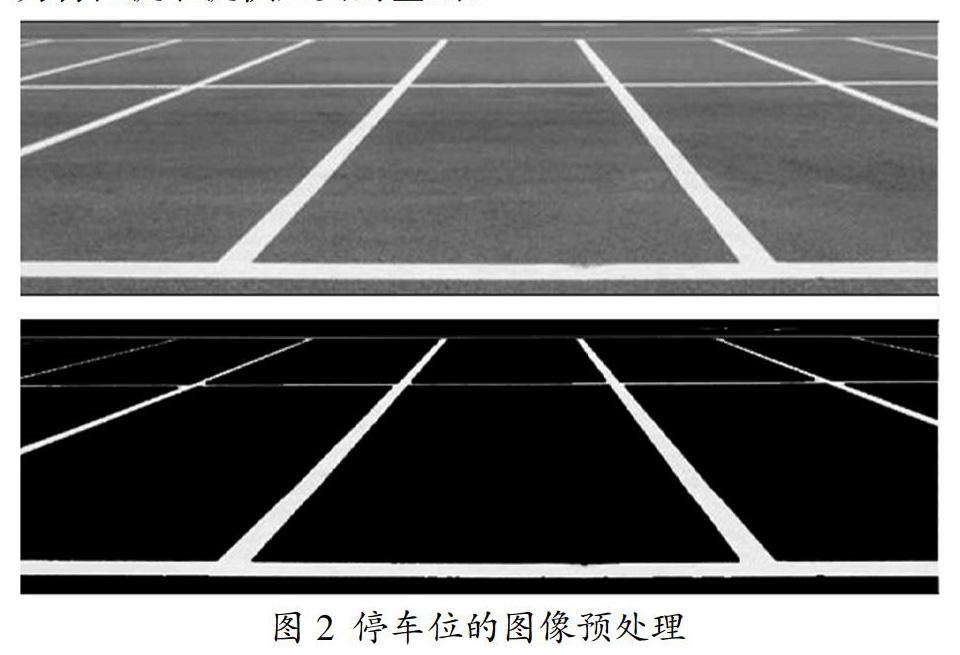
图像预处理用于剔除图像中的无用信息,尽可能简化图像并突出重要信息,图像成像受诸多因素干扰,图像在传输或量化中均有可能产生噪声,这些噪声可能会造成重要信息的失真,导致目标的属性发生变化,所以需要预处理对图像进行优化。图像预处理一般有灰度化、滤波,增强、二值化等操作流程[5]。图像预处理后提高了图像质量,为特征提取提供必要的基础。
1.3 特征提取
特征提取是指观测图像中目标物体的信息,选择恰当的特征描述算子提取这些信息的过程,为避免提取到的特征位数太大,需要进行特征变换。HOG即方向梯度直方图法,是一种特征值检测的方式,它主要是利用了图片中特征点的梯度信息作为特征值,可以用来做目标检测。本实验中采用了HOG特征提取的方法,对图像的边缘特征和局部特性进行检测,将图像划分为大小统一的小区域cell,利用多个cell组成的块block对梯度向量进行归一化处理[6],使结果拥有更好的鲁棒性。
HOG特征提取的实现步骤为:输入图像->图像标准化->计算梯度->计算cell中每个像素幅值和方向->计算重叠的每个block内的HOG描述子->串联所有block区域的HOG描述子->得到图像HOG特征。
猜你喜欢
今日自动化(2022年5期)2022-07-22
电脑知识与技术(2022年9期)2022-05-10
电脑知识与技术(2022年9期)2022-05-10
计算技术与自动化(2022年1期)2022-04-15
教育教学论坛(2018年5期)2018-01-22
软件(2016年4期)2017-01-20
科教导刊·电子版(2016年28期)2017-01-10
科学与财富(2016年28期)2016-10-14
电脑知识与技术(2016年5期)2016-04-14
科技视界(2016年4期)2016-02-22