天线阵仿真测试系统设计
2020-06-23 08:55:06张溪默李效军
舰船电子对抗 2020年2期
张溪默,谭 杰,李效军
(中国电子科技集团公司第二十九研究所,四川 成都610036)
0 引 言
幅度和相位是电磁波信号的2个主要特征参数,被动侦察设备利用目标雷达信号的幅相信息通过测向算法进行解析运算,完成对目标的角度跟踪。天线阵是被动侦察设备截获幅相信息的关键前端组件,其性能直接影响了测向定位精度。在天线阵设计中,由于天线阵各天线单元间的互耦效应[12],导致数学仿真难以模拟天线组阵后的特性,因此建立天线阵仿真测试系统在工程上具有重要意义[3]。本文设计了天线阵仿真测试系统,能够实时采集在不同信号入射方向下天线阵接收的幅相数据,并通过测向算法离线计算测角精度,具有很强的实用价值。
1 系统结构
天线阵仿真测试系统由综合控制分系统、信号前端分系统和弹体姿态模拟分系统构成,各分系统间通过分布式通信网络连接[4-5]。系统的硬件配置结构如图1所示,测试工作主要在微波暗室开展。

图1 天线阵仿真测试系统结构框图
综合控制分系统围绕仿真控制计算机搭建,是测试系统的中枢,以交换机作为中继建立同其它分系统的通信链路,对测试参数进行配置并下发控制指令开展测试工作,并对测试数据进行解算和评判。信号前端分系统是系统的信号接收单元,由天线阵、数控开关和矢量网络分析仪组成,实现对目标信号的快速实时接收。弹体姿态模拟分系统主要是二维转台,用于模拟侦察设备弹体的飞行姿态角度转动过程。
2 技术方案
2.1 信号接收方案
信号前端分系统承担截获目标电磁信号、实时存储幅度和相位信息并以标准数据格式上传给综合控制系统等功能。面对当前电子战环境和电子对抗装备的复杂化、多样化的势态,被动侦察设备趋向于增加天线阵的单元天线数量,以提高波段覆盖能力和搜索压制能力;同时采用频率步进更窄、频点更密集的校准策略为测向算法提供更丰富的幅相数据来获取更精准的定位性能。对本系统信号接收方案的选择,必须实现以下功能:
(1)多通道射频信号接收功能,能够满足不同阵元数量天线阵型的测试需求,具备高测试通用性;
(2)宽波段电磁信号覆盖功能,工作频段应包含常用的预警、火控波段,能够适应不同波段导引头的测试;
(3)幅相信息高速采集功能,在适应密集频点测试的同时保有高测试效率。
基于设计难度和制造成本的考虑,本系统采用串行分时接收方案,测试时以矢量网络分析仪为信号源一次发射导引头工作全频信号,射频前端设备按天线单元基线位置依次采集、存储幅相信息,并逐一上报至综合控制系统,设计了多通道高速数控开关作为射频前端设备,具有32路射频接收通道,工作频段可覆盖L 波段~Ku波段,通过网络接口程控时通道切换速度可达微秒级,各通道间隔离度高达50 dBc,硬件上完全满足系统的功能要求。
2.2 综合控制方案
综合控制方案作为整个仿真测试系统的核心,负责各个分系统之间的通讯、调度和测试的过程控制,利用数据处理算法对测试数据进行解析运算,将处理后的信号幅度、相位信息传递给测向算法进行测角运算,给出各测试频点在不同信号入射角度对应的测向精度。综合控制的流程图如图2所示。

图2 综合控制流程图
综合控制方案由基于C++Bulid编译环境的综控软件实现,集成了通讯、控制和测试等功能。在仿真测试时,综控软件首先进行通信校验建立稳定的控制网络,并配置各分系统和算法的测试参数;启动测试后以既定的测试流程发射雷达模拟信号,同时向弹体姿态模拟分系统下发运动指令,模拟侦察设备平台飞行姿态角度的变化。在测试时,为了获取全向数据,转台运动转角通常设置为以弹体中轴线为中心的对称角度阵列。待目标信号与天线阵列之间的相对角度稳定后,则向信号前端系统下发目标截获指令,并将接收到的幅度、相位数据以标准格式进行存储。图3是综控软件界面。

图3 综控软件界面
在完成预定角度范围的测试后,综控软件调用数据分析程序进行相位计算和测角精度运算。数据分析程序依托于MATLAB 强大的计算能力,具有参数可配置的图形用户界面,支持实时在线更改算法参数,并将运算结果绘制为曲线图[6]。图4是数据分析程序界面。
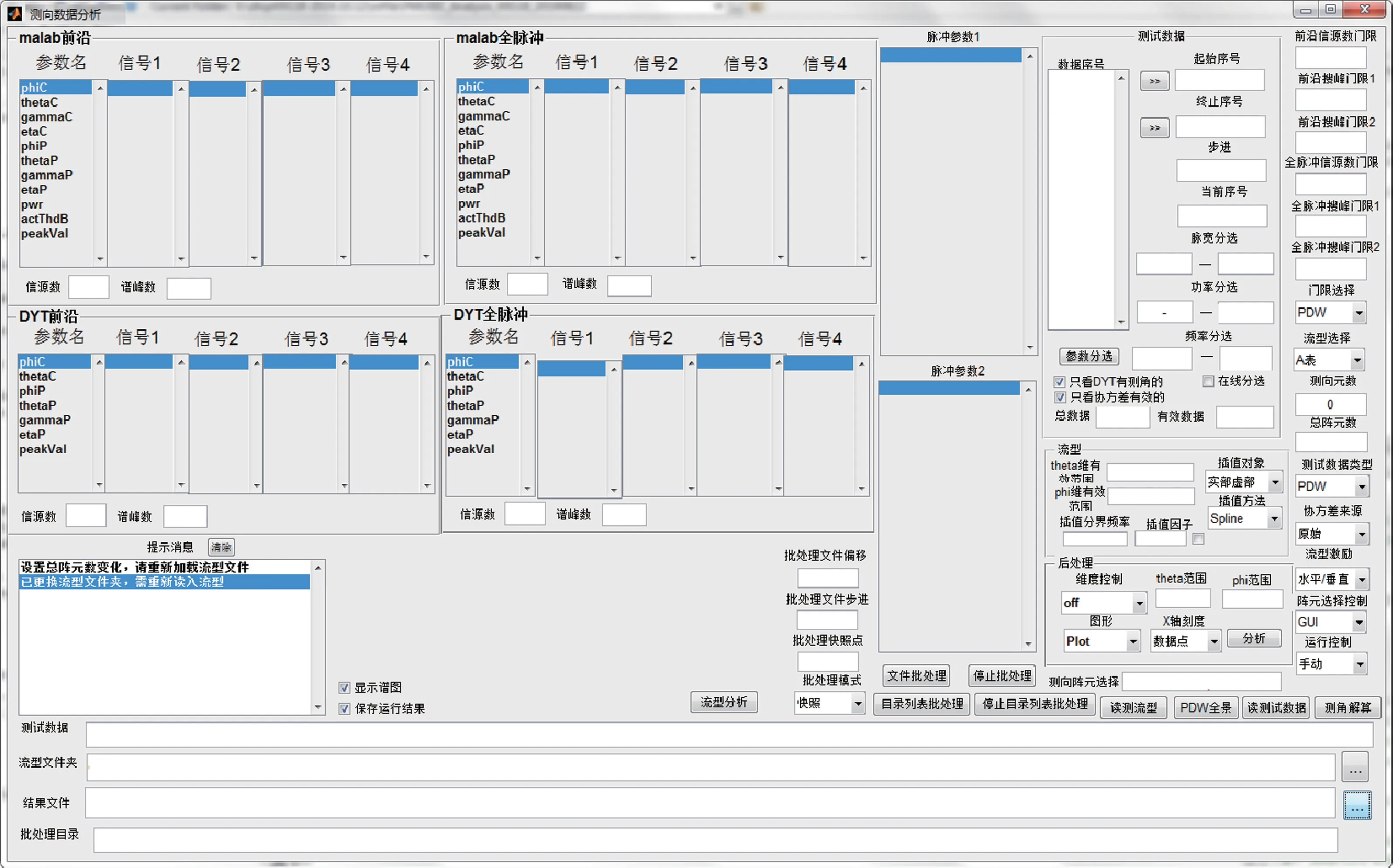
图4 数据分析程序界面
3 仿真试验
选取某在研被动侦察设备的天线阵,利用本仿真测试系统进行测试。测试频段为L 波段~C 波段,目标信号入射角度范围为方位方向±30°和俯仰方向±40°,步进1°。天线阵根据系统设计方案安装于结构样机上,并利用光学准直仪对准目标天线和天线阵中心。
启动测试后,综控软件指示信号前端系统在每一测试角度上采集天线阵截获的目标信号幅度、相位信息,并将测试数据实时显示在软件界面(如图5所示),同时存储在后台。

图5 测试数据实时显示
测试工作完成后,数据分析程序进行以下两方面分析验证工作:
(1)天线阵幅相特性分析
针对C波段某频点,对采集到的各阵元幅相数据进行分析,得到各阵元在不同入射角下的幅相曲线。图6和图7分别是天线阵单元在不同入射角度下的幅度曲线和相位曲线。由图6可见,阵元2在全入射角度范围内增益变化较平缓,阵元1和阵元3在方位正向、俯仰负向大角度上方向图增益明显陡降。由图7可见,阵元1~3的相位均存在一定的非线性波动。结合图6和图7可以为天线阵互耦效应分析及布阵优化提供第一手数据。

图6 天线阵各阵元幅度曲线

图7 天线阵各阵元相位曲线
(2)侦察设备测向性能验证
幅相数据除了支撑天线阵互耦效应分析及布阵优化工作以外,还能对被动侦察系统的测向算法进行离线验证,提前检验设备的测向性能[7]。图8为测向精度对比结果,其中虚线表示某侦察设备的测向精度,实线表示本测试系统利用天线阵幅相数据解算出的测向精度。由图可见二者的精度曲线基本一致,但由于侦察设备的前端接收机和后端信号处理器引入了额外的幅相误差,导致其测向精度低于直接使用天线阵幅相数据计算出的测向精度。试验证明本系统能够用于设备测向性能的前期验证工作。

图8 测向精度对比
4 结束语
本文设计了天线阵仿真测试系统,利用多通道高速前端系统采取串行分时接收方案采集天线阵幅相信息,综控系统控制测试过程自动运行,并在测试完成后调用数据分析程序对数据进行解析运算。试验证明该仿真测试系统实现了天线阵幅相信息的完整采集,测试数据能够用于天线阵互耦效应分析,进而帮助指导布阵优化工作;对测向算法的离线运算可以检验被动侦察设备的测向性能,为设备的前期验证工作提供了可靠的手段。下一步工作是增加数据分析程序的测向算法库,在离线计算测角精度时能够选择不同算法,以满足不同测向体制侦察设备的天线阵测试需求,拓展本测试系统的通用性。
猜你喜欢
ELLE世界时装之苑(2024年5期)2024-05-14 09:45:39
舰船电子对抗(2022年5期)2022-11-25 03:34:24
科学技术创新(2021年11期)2021-05-25 10:04:18
科技研究·理论版(2021年20期)2021-04-20 01:13:14
电子技术与软件工程(2018年4期)2018-03-23 11:59:34
高师理科学刊(2016年8期)2016-06-15 20:27:45
火控雷达技术(2016年2期)2016-02-06 02:29:06
火控雷达技术(2016年2期)2016-02-06 02:29:04
西藏科技(2015年4期)2015-09-26 12:12:58
雷达学报(2014年4期)2014-04-23 07:43:06