
最大转矩电流比控制的内置式永磁同步电机自适应快速参数估计
2020-06-22 12:58谢荻
科学导报·学术 2020年72期
谢荻


【摘 要】本文提出了一种内置式永磁同步电机(IPMSM)控制器最大转矩电流比控制(MTPA)的快速自适应参数估计方法。研究了能够快速参数估计的自适应特征,提出了一种能够实现快速估计的结构自适应观测器。为了从提出的自适应方案中得到快速估计的益处,提出了一种级联自适应观测器设计策略。MTPA是通过求解定子电流优化问题并结合IPMSM估计参数实现的。仿真和实验结果验证了所提出的快速估计自适应MTPA算法是有效的。
【关键词】每安培最大扭矩;内部永磁同步电动机;自适应控制;快速参数估算
1 概述
与传统的感应电动机相比,永磁同步电动机(PMSM)因拥有更高效率和更小体积的相对优势,数十年来在国内外广泛应用。在PMSM类别中,内部永磁同步电动机(IPMSM)机械坚固的转子结构及通过弱磁操作实现的灵活转矩特性使它具有更特殊的优势。为了优化高效率控制器中的IPMSM控制策略,学术界广泛使用最小电流矢量来产生所需转矩的最大转矩电流比控制(MTPA)。由于轴负载条件,MTPA算法高度依赖IPMSM参数和这些参数的标识。
目前主流的是使用离线和在线方法两种方法,获得有关IPMSM参数的精确信息。离线方法是查找根据负载条件预先制成的IPMSM参数表[1],这个方法需要大量的实验测试时间和微控制器存储空间,因此快速性、适应性差。基于信号注入的在线方法通过当前的高频谐波来确定IPMSM是否已达到MTPA,这种方法获得了较高的MTPA跟踪动态性能,其缺点是在产生的转矩中插入纹波可能会造成额外的损失[2]。
本文提出了一种用于IPMSM驱动器的快速收敛自适应MTPA控制方法。研究并讨论了通过自适应方案进行快速参数估计的条件。结果表明,如果所有IPMSM电气参数都在估算中,则无法实现快速的参数估算收敛。因此,为达到MTPA研究了需要估计的最佳参数集,提出了一个自适应观测器进行参数估计。自适应观测器的自适应和反馈增益的设计是通过级联设计策略来执行的。通过这种设计方法,可以精确定义参数估计的收敛时间,并实现高动态MTPA性能。仿真和实验验证了所提出的MTPA算法在轴载荷下的准确性。
2 IPMSM数学模型和MTPA常数参数
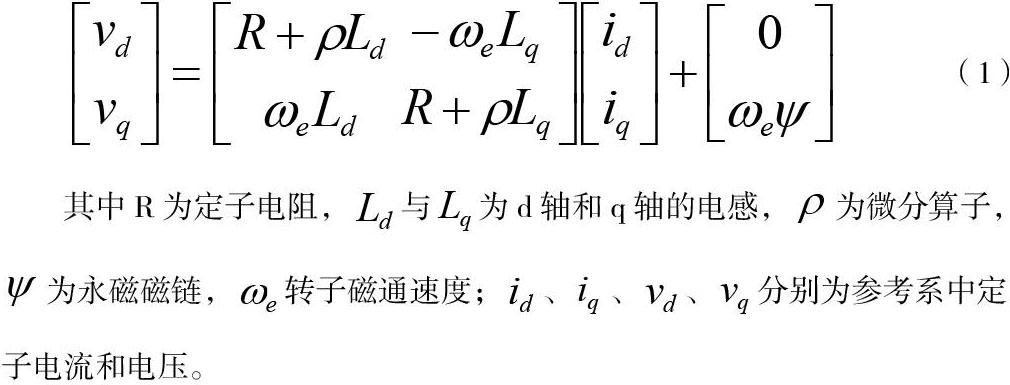
文献中整合了同步参考框架中的IPMSM数学模型,并由下式给出:
其中R为定子电阻,与为d轴和q轴的电感,为微分算子,为永磁磁链,转子磁通速度;、、、分别为参考系中定子电流和电压。
IPMSM电磁转矩表示为,其中p表示极对数。
从(2)中可以看出,存在电流和的无限组合以实现所需的电磁转矩。在这些各种解决方案中,存在一对和,它们以最小的电流幅值带来了最佳的解决方案。这种最佳解决方案也称为MTPA。
为了找到IPMSM最佳电流向量,有必要解决以下约束优化问题,表示当前矢量幅度:
其中是MTPA的的值。d–q平面中MTPA算法的轨迹如图1所示。MTPA算法的局限性由IPMSM 的最大电流和最大可用电压给出。
当达到最大可用电压时,无法在MTPA中增加IPMSM扭矩。在最大电压下增加IPMSM扭矩,必须更深地削弱磁通量[3]。
3 MTPA自適应值
MTPA算法(4)取决于IPMSM参数。为了精确地实现MTPA算法,有必要估计IPMSM变体参数,由于对MTPA算法影响最大的参数为和,下面给出一种参数估计的方法。
参数估计使用梯度算法进行,k1和k2是自适应增益,该算法由下式给出:
借助于估计参数和,自适应MTPA算法的形式为
其中,的估计要受的限制,该值必须高于标称值。
4快速参数估计的设计准则
自适应MTPA算法要求稳定性和良好的动态性能。为了获得良好的估计性能,提出了一种级联设计策略,用于自适应观测器增益的设计。在这种方法中,状态观测器在比自适应定律更高的频率范围内工作,该自适应定律是自适应环路,并指示参数估计动态。
经分析,将控制q轴电感估算为,估计的q轴电感将收敛于具有-α极点的一阶滤波器的动力学的实际电感;级联估计磁通量为其中β是磁通量闭环估计的主导极点,估计的磁通将收敛于实际磁通,其中一阶滤波器的极点为-β。
4.1模拟结果
自适应MTPA级联设计通过仿真进行评估,如图2所示。从自适应回路设计获得的结果是,估计参数收敛到具有一阶系统响应的实际参数值。由于快速的参数估算,在整个参数和负载变化中都可以看到高性能的MTPA跟踪。
结果显示,即使在饱和的情况下,所提出的估计方案也可以实现良好的和跟踪。自适应参数估计方法可以执行MTPA跟踪而无需高频注入。
5实验结果
自适应MTPA控制方法的性能已在IPMSM驱动系统中得到验证。速度和电流调节通过PI控制器执行。所提出的算法是在DSP TMS320F2812,电压源逆变器(VSI),IPMSM,作为负载的IM和绝对编码器的平台中实现。脉冲宽度调制频率和采样频率设置为10 kHz。
自适应观测器增益设置为h = -1000,α=β=20。进行了一系列实验,以通过速度变化,轴负载变化以及与常规控制的比较来验证参数估计的行为和MTPA算法的性能。
图3显示了常规控制与建议的自适应MTPA控制方法之间的比较。转子速度再次保持在115 rad / s,并且在6 s的2 s内施加了轴负载。控制算法从开始,并在4 s处更改为自适应MTPA算法,变为负数,减小。IPMSM标称电流降低了4.3%,显示了所建议的MTPA方法的影响。
6结论
本文提出了一种针对IPMSM驱动器自适应MTPA的快速估计方法。在估计算法中使用的自适应观测器是基于IPMSM同步电流模型构造的。与高频注入估计方法不同,本文提出的自适应MTPA算法不会在生成的IPMSM扭矩中创建其他频率。与传统的IPMSM控制方法相比,当采用自适应MTPA时,验证了电流幅度的减小。
参考文献:
[1]Huang,W.,Zhang,Y.,Zhang,X.,& Sun,G.. Accurate torque control of interior permanent magnet synchronous machine. IEEE Transactions on Energy Conversion,2014,29(1):29–37.
[2]Li,K.,&Wang,Y.. Maximum torque per ampere(MTPA)control for IPMSM drives using signal injection and an MTPA control law. IEEE Transactions on Industrial Informatics,2019,15(10):5588–5598.
[3]Sepulchre,L.,Fadel,M.,Pietrzak-David,M.,&Porte,G. MTPV flux-weakening strategy for PMSM high speed drive. IEEE Transactions on Industry Applications,2018,54(6):6081–6089.
(作者单位:贵州航天林泉电机有限公司)
