
基于导向车道实时利用率的单点全感应式信号控制方法
2020-06-21 15:10安娜徐洪峰
工业技术创新 2020年3期
安娜 徐洪峰


摘 要: 为了提高道路交叉口信号控制的性能,以典型的四路交叉口为研究对象,针对传统的单点全感应式信号控制方法无法充分利用绿灯时间特别是绿灯延长时间的问题,提出一种基于导向车道实时利用率的单点全感应式信号控制方法。利用Python调用VISSIM的COM接口,模拟多目标跟踪雷达检测器,采集交叉口各条导向车道内的机动车运行状态数据。从道路空间利用情况的角度出发,定义导向车道实时利用率概念,并在此基础上设计感应控制逻辑。仿真实验表明,在高负荷交通需求下,与传统基于车辆时距的控制方法相比,采用基于导向车道实时利用率的单点全感应式信号控制方法,交叉口车均停车次数通常小于1次,交叉口车均延误降幅超过10个百分点,交叉口通行能力明显提高。
关键词: 单点全感应式信号控制;导向车道实时利用率;绿灯时间;Python;多目标跟踪雷达检测器;车均停车次数;车均延误
引言
传统的单点全感应式信号控制方法根据检测器采集的车辆时距、占有时间等数据,实时获取机动车到达情况,动态调整机动车相位的绿灯时间,能够在一定程度上实时响应交通需求的随机变化。但是,该方法仍存在无法充分、高效利用绿灯时间的情况,例如:在交叉口进口道左侧展宽道路结构下,当左转机动车排队长度超过其导向车道长度时,影响相邻车道正在放行的直行机动车,以致其不能按时通过交叉口,正在放行的直行机动车相位绿灯时间未得到充分利用;对于具有单条左转专用车道的交叉口,若左转排队机动车上溯至上游路段,且排队至上游路段的左转机动车队列中有一辆直行机动车,那么在左转机动车相位放行过程中,当启动波传递至该直行机动车时,该车驶入相邻的直行导向车道,左转连续车流出现短暂中断,该机动车相位切断绿灯,导致该车后方剩余的左转排队机动车均未得到服务。
以往研究通过研究单点全感应式信号控制方法的参数动态取值问题(如车辆时距阈值[1-2]、最小绿灯时间[3-4]、最大绿灯时间[5]等),提高单点全感应式信号控制方法的控制效果。然而,受检测手段的限制,单点全感应式信号控制方法的研究仍未逃脱利用断面检测器刻画机动车到达情況的固定模式。近年来,随着交通数据采集技术的进步,以多目标跟踪雷达为代表的新型检测器的出现,不仅为单点全感应式信号控制方法的研究提供了丰富的数据,更为单点全感应式信号控制方法的技术变革带来了全新的视角。在此背景下,本文以典型的四路交叉口为研究对象,以进一步提升单个信号控制交叉口的性能为目标,提出一种基于导向车道实时利用率的单点全感应式信号控制方法,并进行仿真实验,评估信号控制效果。
1 导向车道实时利用率
导向车道内的机动车具有确定的流向,原则上不允许发生换道行为,且作为绿灯和黄灯时间服务的首选对象,被赋予通过停止线的权利。机动车一旦进入导向车道,将寻求一定的速度通过停止线,以实现空间上的移动。同时,机动车对道路空间的占用也将随着速度的变化而变化。机动车的速度越高,期望占用的道路空间越大。本文将机动车期望占用的空间长度称为安全扩展长度,它包括机动车的实体长度和规避碰撞距离两部分。其中,规避碰撞距离是指为保证机动车在遇到紧急情况时留有足够的刹车空间,而在机动车前方存在的动态距离。该距离使得驾驶员在当前速度下,采取制动决策至机动车完全静止的同时,前方仍留有一定的安全富余量。故在某一时刻,机动车的安全扩展长度表达式为
其中,表示时刻机动车的安全扩展长度;表示机动车的实体长度;表示时刻机动车的速度;表示驾驶员的标准制动反应时间;表示机动车紧急制动时的最大减速度,它与机动车的刹车性能、道路路面摩擦系数等有关,在道路状况良好的情况下,取值一般为6~8 m/s2[6];表示机动车在静止状态下与前方物体保持的理想距离。
导向车道实时利用率是指属于某一机动车相位的所有导向车道内的机动车的安全扩展长度之和与该相位所有导向车道长度之和的比值,其表达式为
其中,表示时刻相位的导向车道实时利用率;表示时刻相位的导向车道内的第辆车的安全扩展长度;表示时刻相位的导向车道内的机动车数量;表示相位的第条导向车道的长度;表示相位的导向车道数量。
上述所指的导向车道内的机动车是指实体长度位于导向车道内的机动车。值得注意的是,对安全扩展长度超出停止线和未进入导向车道内的机动车实体长度部分,视作不属于导向车道承载的交通需求,不予计算。
如图1所示为某一时刻导向车道实时利用率示意图。显然,在保证机动车运行安全的前提下,机动车的安全扩展长度越大,导向车道的实时利用率越高,绿灯的实时利用程度也就越高。
2 单点全感应式信号控制方法
区别传统的单点全感应式信号控制方法,本文提出的是一种基于导向车道实时利用率的单点全感应式信号控制方法。基本控制原理为:获得通行权的某一机动车相位,在最小绿灯时间结束后,根据检测设备采集导向车道内机动车的位置、速度和大小,逐秒计算该相位的导向车道实时利用率,作为该相位是否切断绿灯的依据。
在双环相位结构下,本文提出的单点全感应式信号控制方法的感应控制逻辑如图2所示。
在双环相位结构下,满足下列条件之一时,任意前置相位独立切断绿灯:1)该相位达到最小绿灯时间,且该相位的导向车道实时利用率小于设定阈值;2)该相位达到最大绿灯时间。前置相位的绿灯结束后,通行权传递至与其冲突的后置相位。
在双环相位结构下,满足下列条件之一时,两个后置相位同时切断绿灯:1)两个相位均达到最小绿灯时间,且两个后置相位所有的导向车道构成的空间计算的导向车道实时利用率小于设定阈值;2)任意相位达到最大绿灯时间且另一相位达到最小绿灯时间。后置相位的绿灯结束后,通行权传递至相交道路的前置相位。
3 仿真实验
选取典型的四路交叉口为研究对象,利用德国PTV公司的微观交通仿真软件VISSIM 10.0建立仿真模型,利用Python实现基于导向车道实时利用率的单点全感应式信号控制方法的开发。在高负荷交通需求下,以左转前置相位显示顺序为例,通过对比分析本文提出的方法与基于车辆时距的传统方法产生的交叉口性能,验证本文提出的方法的优越性。
3.1 检测器布设要求
对于基于车辆时距的传统控制方法,在每条进口导向车道距离停止线40 m处布设纵向长度为2 m的检测器。
实际应用中,多目标跟踪雷达检测器的具体布设位置,如图3所示。由于难以获得大量的现场数据,以及难以在现实环境下直接应用本文提出的方法。因此,利用Python调用VISSIM的COM接口,模拟多目标跟踪雷达检测器,实时获取各条导向车道的机动车运行状态数据。
3.2 道路空间条件
交叉口的道路空间设置为:各进口道有1条左转车道、2条直行车道、1条直右合用车道,出口道的机动车车道数量为3条。进口道采用左侧展宽的形式,导向车道长度为60 m,展宽渐变段的长度为10 m。道路限制速度为50 km/h。
3.3 交通需求条件
在高负荷交通需求下,采用随机抽样的方式确定机动车和行人的交通量。交通需求抽样范围如下:各进口道的机动车交通量为1 200~1 500 pcu/h,其中,大型车比例为0%~10%,人行横道的单向行人交通量为120~150 ped/h。各进口道的机动车左转、右转比例分别为15%~20%、5%~10%。
3.4 信号控制条件
对比对象的车辆时距取值为3 s。假设导向车道内的机动车以限制速度行驶至停止线前某一位置时,达到设定阈值,使得机动车相位切断绿灯,认为该车在黄灯结束最后一秒之前顺利通过停止线为理想状态,故根据上述特点确定导向车道实时利用率的阈值。那么,当黄灯时间为3 s、导向车道长度为60 m、道路限制速度为50 km/h时,对应的导向车道实时利用率阈值为0.463。
另外,实验组(本文提出的方法)和对照组(基于车辆时距的传统方法)机动车相位的黄灯时间取3 s,红灯清空时间取2 s,左转、直行的最小绿灯时间分别取8 s、15 s,而最大绿灯时间取各自最小绿灯时间加上30 s的增量。
3.5 仿真模型参数
自由流状态下,机动车的最小、最大期望速度分别为48 km/h、58 km/h。在Wiedemann74跟驰模型中,机动车的最小、最大前视距离分别取30 m、250 m,机动车的最小、最大后视距离分别取30 m、150 m;平均停车间距取2.0 m,期望安全距离的附加部分取2.5 m,期望安全距离的倍数部分取3.5 m,此种情况下,单条常规车道的饱和流率约为1 800 pcu/h[7]。在车道变换模型中,机动车消失前的等待时间取60 s。其他驾驶行为参数均采用默认值。每次实验选取7个不同的随机数,共运行5次仿真实验。每次仿真运行的总时间为7 800 s,数据采集时段为600~7 800 s。
4 结果与讨论
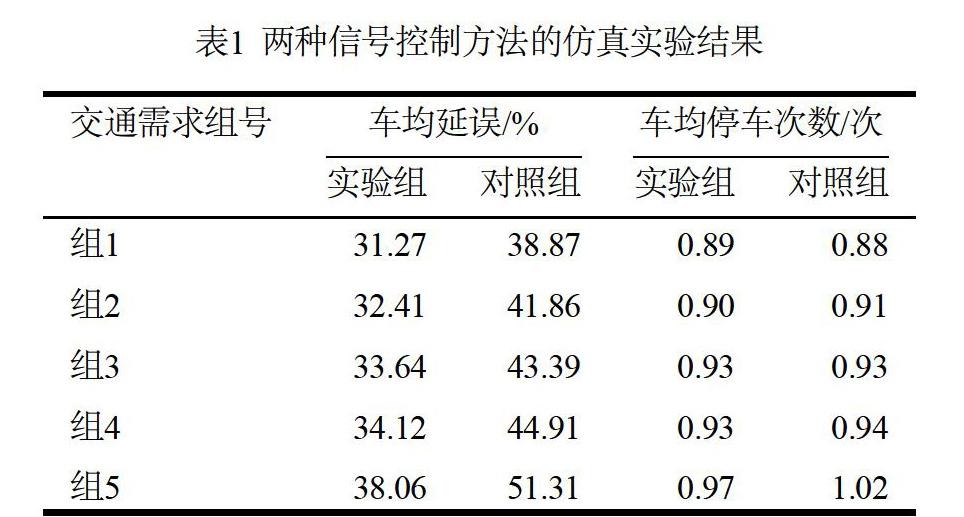
第3章利用VISSIM构造了仿真实验环境,通过VISSIM的COM接口与Python交互,实时获取了检测数据,实现了基于逻辑规则的单点感应控制策略。本章选取交叉口车均延误和车均停车次数作为评价指标。表1为每组仿真实验下实验组和对照组得到的7个随机种子下交叉口车均延误和车均停车次数的平均值。从表1中可以看出,实验组的车均停车次数与对照组基本相同,但实验组车均延误明显小于对照组,平均降低了约10个百分点,交叉口通行效率明显提高。
通过观察仿真运行过程可以发现,本文提出的方法取得良好性能的原因主要在于以下三方面:首先,本文提出的方法考虑了机动车的瞬时速度,故几乎不会出现为缓慢移动或静止的机动车延长绿灯时间的情况;其次,对于具有多条导向车道的情形,本文摒弃了传统方法逐车道检测先后或同时gap out的机制,将多条导向车道视为一个整体进行参数计算,最大程度上规避了为个别车道延长绿灯导致的低效现象;最后,由于本文在逐秒计算机动车相位的导向车道实时利用率的基础上作出决策,故当发现机动车通行需求降低时,能够迅速切断绿灯,不会出现传统方法中浪费绿灯延长时间的滞后现象。理论上,本文提出的方法为寻求更高的机动车通行效率,可能会出现追求小信号周期的情况,从而导致交叉口车均停车次数的增加,但仿真实验结果表明,本文提出的方法与传统方法在交叉口车均停车次数几乎没有区别(多数情况下小于1次),消除了上述顾虑。
5 结语
为了克服传统的单点全感应式信号控制方法存在的不足,本文提出了一种新颖的基于导向车道实时利用率的单点全感应式信号控制方法。仿真实验结果表明,车均延误平均降低了约10个百分点,且交叉口车均停车次数几乎未受影响,在高负荷交通需求下,本文提出的方法具有明显的优越性。
参考文献
[1] Yun I, Best M, Park B. Evaluation of Adaptive Maximum Feature in Actuated Traffic Controller: Hardware-in-the-Loop Simulation[J]. Transportation Research Record Journal of the Transportation Research Board, 2007, 2035: 134-140.
[2] Zhang G, Wang Y. Optimizing Minimum and Maximum Green Time Settings for Traffic Actuated Control at Isolated Intersections[J]. Intelligent Transportation Systems, IEEE Transactions on, 2011, 12(1): 164-173.
[3] Zheng X, Recker W, Chu L. Optimization of Control Parameters for Adaptive Traffic-Actuated Signal Control[J]. Journal of Intelligent Transportation Systems, 2010, 14(2): 95-108.
[4] Shiri M J S, Maleki H R. Maximum Green Time Settings for Traffic-Actuated Signal Control at Isolated Intersections Using Fuzzy Logic[J]. International Journal of Fuzzy Systems, 2016, 19(1): 247-256.
[5] Park B B, Myzie C Agbolosu-Amison S J. Improving Actuated Traffic Signal Control Operations Using Concept of Dynamic Gap-Out[J]. American Journal of Analytical Chemistry, 2006, 03(12):840-848.
[6] 王瑄, 李宏光, 趙航, 等. 现代汽车安全[M]. 北京: 人民交通出版社, 1998.
[7] PTV Vision. VISSIM 10 - User Manual[M]. Karlsruhe: PTV AG, 2018.
