吊弦识别在接触网几何参数检测中的研究与应用
2020-06-19 03:34叶峥珏中国铁路上海局集团有限公司科研所
上海铁道增刊 2020年1期
叶峥珏 中国铁路上海局集团有限公司科研所
1 绪论
目前研发使用的接触网几何参数检测仪是以毫米级的采样间隔进行连续检测,检测结果波形能清晰的描绘出接触线在空间位置中的静态状态,故障点处的定位以距离某杆号多少毫米这种方式,故设计之初只考虑了杆号定位作为唯一的定位功能。但实际在现场使用时,若要调节接触网空间位置时,是通过调节吊弦来完成的,故在检测过程中获取吊弦点数据相当重要。针对这一情况,经过分析只需得到吊弦位置信息,就能确认吊弦点的数据,以此解决这个现场问题。目前行业中吊弦识别方法主要分为三种,一种为测距传感器感应,一种为激光雷达扫描,还有种为基于图像处理识别。前两者需要增加新模块来满足先前提出的需求。但基于图像处理识别与此检测仪的机器视觉检测方式相符合,可以直接利用原有的基础设备加以改进。所以运用图像处理的方法来识别吊弦位置是最为高效和快捷的。
2 检测仪概括
图1 为本文涉及的接触网几何参数检测仪。在维修天窗内,能以步行速度对接触网悬挂状态进行周期性检测或重点检测,具有接触网几何参数、接触线磨耗、支柱侧面限界、定位里程测量,以及同步定位补偿和自动识别超限预警等功能。检测仪整体及各重要元器件进行了防水设计,整体防水等级达到IP63,重要元器件防水等级达到IP65。仪器采用了最新电子技术进行设计、装配。具有功能选择直观、测量取数快、精度高、测量范围宽、稳定性好、结构紧凑、易操作等特点。

图1 检测仪设备图
2.1 硬件结构介绍
此小车的特征在于:机械结构分为左右两个走行部(其中一个带有编码器),车架检测横梁,所述车架上固定设有两个检测壳体(其中一个带有激光测距仪用于测量侧面限界),两个壳体中各有一对线激光器和CCD 线阵列相机,相机分辨率为2 K,双通道模式下最高线扫描频率为36 kHz,线激光器的光源发射区域朝向车架正上方,线阵列相机拍摄的有效区域与激光器的光源发射区域重合。同时,将安装在车架横梁中的位移传感器、倾角传感器采集轨道轨距、超高变化值对检测仪姿态进行实时修正补偿得到正确的导高、拉出值等接触网几何参数。检测结果交互通过一台军用笔记本来呈现,平放置于车架横梁正中间托盘上。整个检测仪检测期间,随着检测仪在钢轨上推行,笔记本屏幕上实时出检测结果。
2.2 软件框架
软件框架分为三大模块:前台,后台和定位。前台主要为人机交互界面,输出检测结果;后台分为图像采集和里程编码器计数模块。图像采集中又包含接触网几何参数检测和吊弦识别功能。吊弦识别和里程编码器计数形成里程定位模块,见图2。

图2 总体框架
(1)前台:
①数值波形图:经过双目视觉三维测距计算出来的各项检测值,通过波形图的方式实时在前台界面中显示出来,并在相应位置处标示出杆号标志和吊弦标志。
②杆号标志:由编码器计数通过查询数据库递推得到。
③吊弦标志:为本文研究的对象办法,基于图像智能识别得到。
(2)后台:
①图像采集:双目CCD 相机通过编码器触发采集图像并分析,通过三维测距,实时计算出该位置接触网的几何参数,包括导高,拉出值,磨耗等数据。并保存图像信息,通过智能识别分析出吊弦位置并标记。
②里程编码器计数:随着检测仪推行,里程编码器随之转动,记录下行走里程,并匹配已有工区数据库,递推出杆号位置并自动修正。根据走行轮直径120 mm,编码器每转256个脉冲,可得采样间隔=PI×D/I=3.1415×120 mm/256=1.47 mm
(3)定位:
在已知杆号和吊弦点位置的情况下,能够精确地定位到任何位置接触网信息。
3 吊弦识别研究
通过前期大量的接触网图像采集,可以直观的理解除了接触网悬挂零部件,图像背景均接近于黑色(站场、硬横跨等少量特殊地段除外)。所以图像中只呈现了接触线、承力索和吊弦。其中原因是在镜头前加了滤光片,滤除大部分可见光,再通过红外激光作为光源成像。接触线由于受电弓长期的滑磨,反光强度比较强,图像中显示得最亮,而承力索和吊弦则相对暗点,但区别不是很大。前期研究采用matlab 进行图像分析处理:
(1)对图像进行ROI 区域裁剪,保留吊弦出现部分的图像区域,滤除其他不感兴趣的图像区域,减少软件处理的时间以及空间复杂度,提高图像处理效率。
(2)通过Canny 算法边缘检测,找出图像中接触线,承力索和吊弦的边缘。
(3)利用matlab 内置的Hough 直线检测函数对图像中所有直线进行检出。
本文利用霍夫(Hough)变换来对图像进行吊弦识别,霍夫变换是一个特征提取技术。其可用于隔离图像中特定形状的特征的技术,应用在图像分析、计算机视觉和数字图像处理领域。目的是通过投票程序在特定类型的形状内找到对象的不完美实例。这个投票程序是在一个参数空间中进行的,在这个参数空间中,候选对象被当作所谓的累加器空间中的局部最大值来获得,所述累加器空间由用于计算霍夫变换的算法明确地构建。下面来说明具体的实现,图3 为一条直线在直角坐标系与极坐标系关系,ρ 为原点到直线的距离,θ 是x 轴与连接原点和最近点直线之间的夹角。假设一个平面中有一条直线,任取直线上的一个像素点分别计算θ 为0°~180°时的ρ,θ 的取值跨度不要太大,一般为PI/180。计算得到的ρ 值分别投上一票,同理计算直线上的其他像素点的ρ 值并投票。最终遍历计算投票结果后,得到一个最高票数的ρ值,到此可求出直线方程了。总结就是hough 变换要做的就是追踪图像中每个点对应曲线间的交点,通过设定阈值来判断这个交点所代表的参数在图中是否为一条直线。超过阈值则判定为是,反之为否。

图3 直角坐标系与极坐标系关系图
(4)利用吊弦线和其他线斜率的不同性进行吊弦的识别,判断图片中是否存在吊弦。通过大量数据分析后,得出的吊弦在图像中的长度范围和倾角范围。通过采集图像分析出以下参数:
①检测出的直线长度需处于550 至1550 像素之间。
②检测出的直线倾角需处于85°至95°之间。
当图像中无吊弦时,图像中只有偏向于水平的直线即承力索和接触线。因此此时无法检测到吊弦。但图像中有吊弦时,图像中还有竖直方向的直线即吊弦。图4 为吊弦识别的三个步骤处理后的效果图(考虑浏览效果,RGB 数值经过反转)。
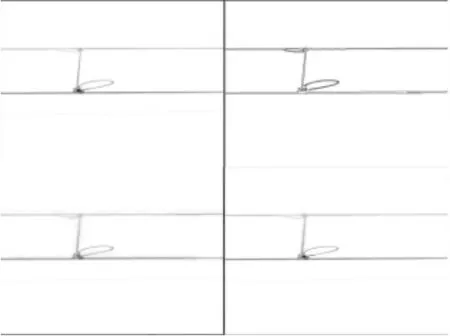
图4 处理结果效果图
(5)将上述算法加载在现场检测仪上,将吊弦识别结果发送给几何参数采集软件中,进行吊弦标志的置位。识别出吊弦位置后,根据检测到的直线的像素点判定出吊弦所在位置并将所在位置发送到检测仪分析软件中,导出excel 结果见图5,杆号标志处显示杆号和对应的公里标,两个杆号之间的标志则为吊弦标志。经实验结果可见,基本满意比较理想。
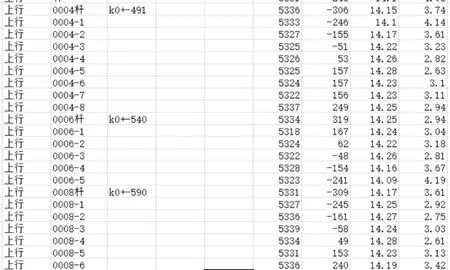
图5 输出结果
4 结束语
此产品已经在市场上推广并使用了数年,铁路与城市轨交的供电系统客户使用后都反应良好,在使用过程中也多次得到建议与客户需求。在反馈客户需求的同时,不断改进,这款手持式接触网几何参数检测仪已经得到多次改良。本文提及的吊弦识别模块就是最新增加的功能,现阶段已完成实验室分析处理,在数据回放时将吊弦信息预处理,基本满足客户需求。在实验过程中也存在漏判和误判的情况,例如前文所提到站场、硬横跨、某些隧道等工况较为复杂的环境,所采集到的图像,对其识别的干扰比较大,需针对这些状况研究更高效的图像识别技术,将复杂干扰信号滤除,进一步提高吊弦识别的准确性。
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
中国应急管理科学(2022年2期)2022-05-23
云南画报(2021年10期)2021-11-24
锻压装备与制造技术(2021年5期)2021-11-13
建材发展导向(2021年10期)2021-07-16
科学技术创新(2021年5期)2021-03-17
云南画报(2020年12期)2021-01-18
——编码器
演艺科技(2020年7期)2020-08-13
电子制作(2019年7期)2019-04-25
电子制作(2017年20期)2017-04-26