随钻地质导向智能决策的实现与应用
2020-06-16 05:20林昕苑仁国韩雪银卢中原于忠涛谭伟雄
石油钻采工艺 2020年1期
林昕 苑仁国 韩雪银 卢中原 于忠涛 谭伟雄
中海油能源发展股份有限公司工程技术分公司
随钻地质导向是地质工程一体化开发的核心技术之一,对于当前勘探开发的热点资源,如页岩气水平井工厂、煤层气多分支水平井以及复杂油气藏等,有着广泛的应用前景[1-6]。地质导向决策是地质导向工程师基于随钻测井数据进行实时分析的结果,体现了随钻地质导向技术的核心价值[1-2]。然而,由于人员经验差别会导致决策结果不同并最终影响导向施工效果。开展随钻地质导向智能决策研究以消除人员经验差别,可以提高施工服务质量,降低地质导向技术服务成本,提高实时决策分析效率。该研究对于实现地质导向技术的智能化转型具有重要意义。
1 地质导向决策流程
地质导向决策是将现场采集得到的实时随钻测井数据进行分析获取导向关键参数,并将分析结果与导向施工目标相结合,转化为地质导向施工指令的过程[1,6]。
1.1 地质导向施工目标
导向施工目标是指作业者根据地质油藏开发计划确定的井轨迹设计方案[6-7]。图1展示了常见的3种地质导向施工目标,其中圆点代表钻头,箭头代表钻进方向,虚线代表目标钻进轨迹。
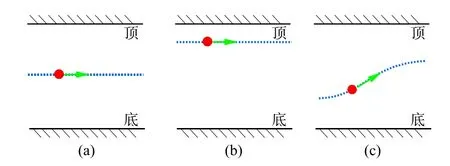
图1地质导向场景类型示意图Fig.1 Schematic type of geosteering scenario
不同的导向施工目标决定了井轨迹不同的设计方案:(1)确保钻遇率,将钻井轨迹设计在储层中部(图1a);(2)提高水平井产能,例如含边底水储层(或阁楼油)开发中,为避免后期底水锥进,将钻井轨迹设计在贴近储层顶部的位置(图1b);(3)追踪储层甜点,沿储层水平段某一特征物性设计钻井轨迹(图1c)。
1.2 导向关键参数的获取
通常地质导向工程师会采用地质导向建模的方法进行分析获取导向关键参数[5-9],包括:钻头位置、地层厚度、工具能力以及倾角夹角。钻头位置基于模拟拟合的分析方法,结合实时随钻测井数据,分析井轨迹所处地层的位置;地层厚度即目的层真实厚度,通常结合区块经验和邻井数据分析获得;工具能力即分析工具在当前地层环境下的施工能力,可以通过分析已钻井段的工具作业情况得到;为了减少关键参数数量,本文的倾角夹角是指地层倾角与钻头井斜之间的夹角(图2b)。其中地层倾角通过随钻测井数据分析得到;钻头井斜目前尚无直接测量的技术,通常是根据现有测斜数据,结合工具能力进行预测得到。
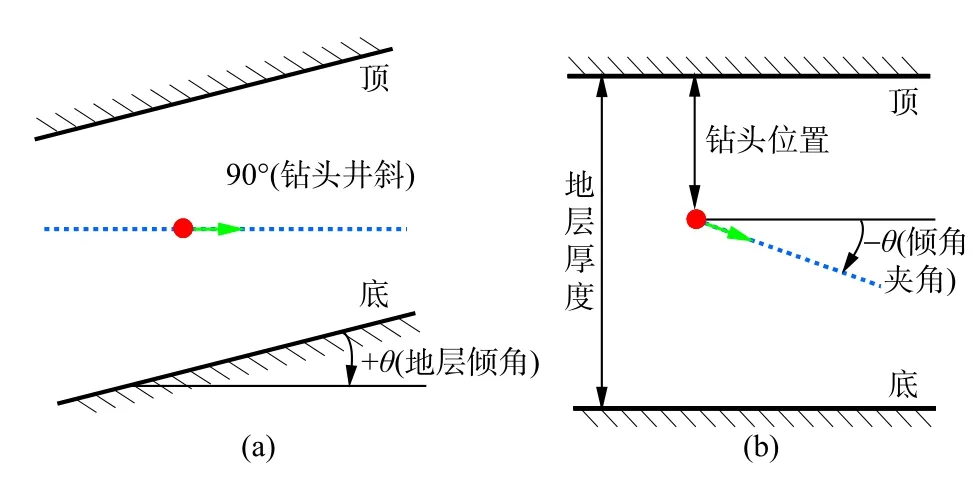
图2导向关键参数示意图Fig.2 Sketch of key steering parameters
1.3 地质导向施工指令
目前绝大多数地质导向施工决策是基于垂向(井斜)上的调整,极少数用到横向(方位)上的调整[10]。基于垂向调整的地质导向指令可以分为4种类型:稳斜、增斜、降斜以及地质停钻。其中地质停钻是指遭遇重大地层变化(如断层、尖灭等),当前工具施工能力条件下已无法满足导向目标要求,需要对导向目标进行调整的情况。
2 智能决策的实现
通过上文分析,可以知道地质导向决策是寻找从地质导向关键参数(钻头位置、地层厚度、工具能力以及倾角夹角)到地质导向决策指令(增斜、稳斜、降斜以及地质停钻)之间的映射关系。
受随钻工具测量零长的影响,通常钻头位置比地层数据测量位置提前8~20 m,因此计算得到地层信息相对钻头位置滞后。同时工具在地层中的工作状态受围岩地层环境变化影响大,导致在非均质地层中的轨迹预测存在较大误差(图3)。在生成导向决策指令的过程中,需要充分考虑不确定因素下的计算误差。
2.1 机器学习的应用
采用机器学习的神经网络算法对分类等问题的应用效果较好。分类问题是指通过某一组特征变量将对象分配到一组预定义的分类,其计算的本质是求取特征数据集到分类数据集的函数映射[10-11]。
地质导向智能决策应用了神经网络的运算方法。通过已经完成的地质导向施工数据得到训练数据集,经过整理形成结构化数据并将该数据用于神经网络训练。训练完成后的神经网络可以根据输入特征变量自动生成输出指令,实现导向智能决策。
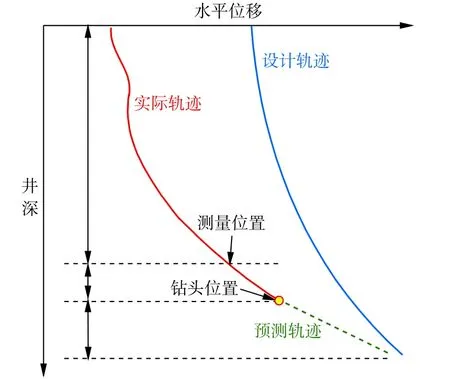
图3预测轨迹示意图Fig.3 Sketch of predicted trajectory
设计神经网络为3层前馈网络,包括输入层、隐藏层和输出层。根据地质导向施工决策中的4个核心关键参数(钻头位置、地层厚度、工具能力以及倾角夹角),对应其输入层的4个特征向量;其输出层为导向决策使用的4条指令(增斜、稳斜、降斜以及地质停钻),对应其输出层的4种指令类型;隐藏层有20个神经元,通过实验后确定其数量。神经网络的初始参数矩阵由随机数组成[11-12]。
由于输入的特征变量存在数量级差别,会导致运算过程中某几个变量权重过大的情况,为防止单一数据异常影响其他变量,对所有训练数据进行归一化处理,即所有输入的特征变量都转换为区间[0,1]之间的数。调用逻辑回归函数进行运算,神经网络的每个神经元节点的输出值范围在[0,1]。对于不同的指令输出选取最大输出值对应的指令类别作为计算结果[11-16]。
2.2 多井训练
共选用了60口井的数据,包含3种常见地质导向目标场景,并从中整理共计3 000条导向决策样本数据,样本分布情况为:784条增斜指令(指令1),933条稳斜指令(指令2),576条降斜指令(指令3)和707条地质停钻指令(指令4)。通过计算机将该数据集随机分成训练集、验证集以及测试集3部分,分别占比70%、15%和15%[12]。
用训练集数据训练并调整神经网络;验证集数据测量神经网络表现并在神经网络停止改进的情况下终止训练过程;测试集数据不参与神经网络训练,用来测试神经网络的训练效果[11-12]。如图4,选取2 100条训练集数据和450条验证集数据对神经网络进行训练,得到的神经网络对于训练集和验证集的指令分类正确率达到90.2%和88.9%,即输出正确指令数分别达到1 894条和400条。
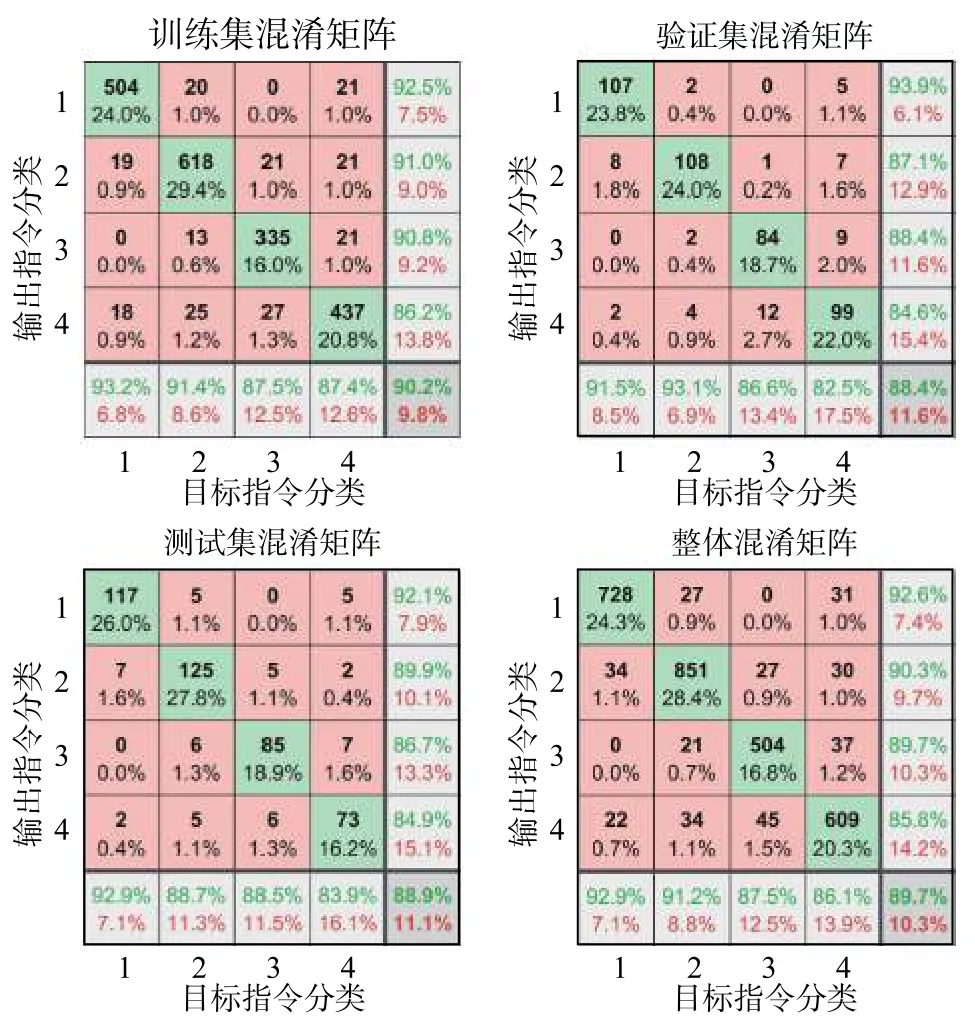
图4输出数据结果对比分布矩阵Fig.4 Distribution matrix of output data result contrast
神经网络训练误差曲线如图5,经过75次的迭代计算获得拟合的最佳效果。在第69次计算得到的验证集最佳交叉熵值为0.055。选取测试集的450条数据对神经网络的性能进行进一步测试,结果显示准确率达到88.9%,比训练集数据的结果略差,仍然满足施工需求。以上结果表明训练得到的神经网络对导向决策的模拟效果较好。
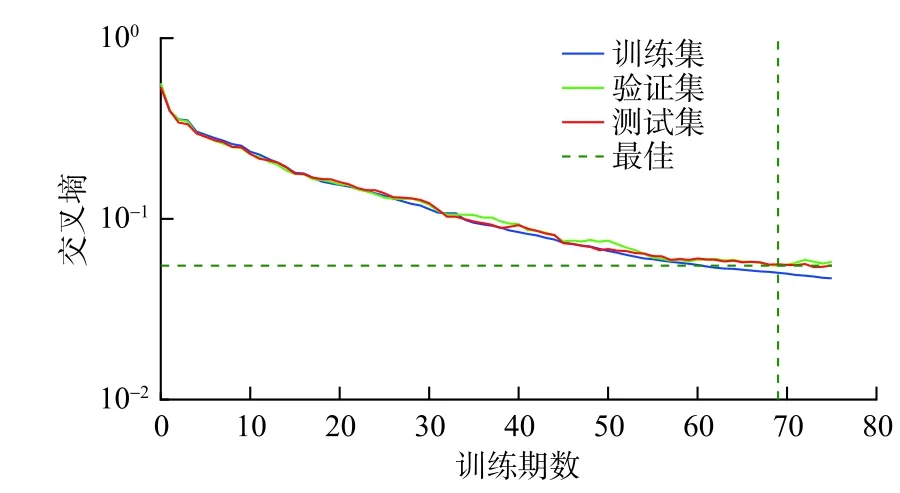
图5验证集数据误差分析Fig.5 Analysis on the data error of validation set
在错误的判定样本中,地质停钻指令对应的错误输出样本数量共计98 条,占到全部错误样本的32%,分析该类别指令判定结果受到输入训练样本数量少的影响。最终地质停钻指令的预测准确率86.1%。另外,可以发现所有错误类型中没有出现相反的决策指令,即该增(降)斜的地方采用降(增)斜的情况发生。
最终统计表明,采用神经网络算法的导向决策模块预测准确率达到89.7%,可实现地质导向智能决策,满足工程施工需求。
3 实例分析
选取某单井施工数据(图6),如图中黄框位置所示,由于导向施工盲目追求储层甜点和钻遇率,导致轨迹大幅度调整[1,10]。区别于传统地质导向的定性分析结论,智能决策可以提供更直观的定量分析。
图6导向指令大幅度调整导致钻井风险Fig.6 Drilling risk caused by the substantialadjustment of steering order
利用智能决策系统进行回放分析,共提取169条指令并进行对比,输出指令分布如图7a 所示:4种指令类型采用不同的颜色进行表示,上色带为实时决策指令序列,下色带为智能决策指令序列。其中共43条实时施工指令和智能系统的输出指令相同,即正确指令的占比仅25.4%。指令输出对比如图7b所示。智能决策分析可以更直观地展示导向施工质量,提供定量分析结果。智能导向决策提高了地质导向施工的分析效率,可有效辅助作业人员实施对多口井的同时监控。
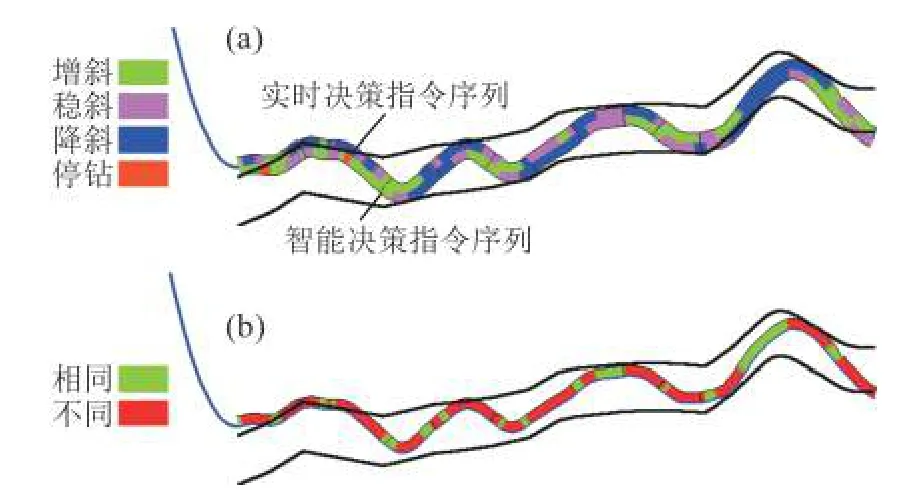
图7导向指令输出分布及对比分析Fig.7 Output distribution and comparative analysis of steering order
进一步分析发现,共52条“稳斜”指令在钻进过程中采取了非稳斜的导向措施,占所有指令的32%。说明作业团队在导向施工中存在频繁调整轨迹的情况,即可采用稳斜指令的情况却采用了增斜或降斜的导向措施,最终导致轨迹出现大幅波动的轨迹形态。
将图7b中导向指令对比分析图进一步和工程施工狗腿度对比,如图8所示,可以观察到错误指令发生的位置同狗腿度超限(6(°)/30 m)的位置吻合度达到69.2%。说明作业团队在导向施工中大量采用了超出轨迹调整限制的狗腿度来确保达到地层钻遇率目标,增加了钻井工程风险,并为后续生产留下井眼坍塌的隐患。
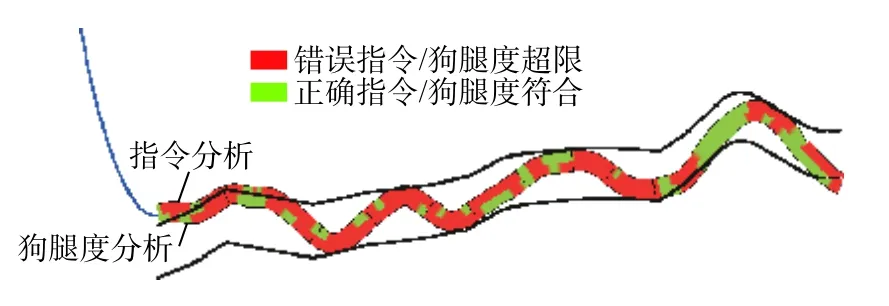
图8导向指令和施工狗腿度分布对比Fig.8 Distribution comparison between steering order and construction dogleg
4 结论
(1)梳理了地质导向决策流程,分析了常见的地质导向目标类型,包括确保钻遇率、提高水平井产能以及追踪储层甜点;导向关键参数的获取,包括钻头位置、地层厚度、工具能力以及倾角夹角;导向决策指令分类,包括增斜、稳斜、降斜以及地质停钻。
(2)利用机器学习的神经网络算法实现地质导向智能决策。根据常见的3种地质导向目标,选取60口井的3 000条样本数据进行结构化处理,并完成神经网络训练。训练结果表明输出指令的正确率达到89.7%,满足实时地质导向的作业需求。
(3)应用地质导向智能决策,可以实现对地质导向施工质量的定量分析,进而可以对不同的井进行对比分析,达到优化井眼轨迹、降低钻井工程风险和提高导向施工效率等目的。
(4)地质导向决策具备共性特征,建议结合迁移学习对算法进一步提升,将训练得到的模型应用到其他区块,避免重复训练以提升效率,并解决邻井数量少(缺乏训练数据)情况下地质导向智能决策技术的应用。
猜你喜欢
作文成功之路(高考冲刺)(2022年8期)2022-11-21
当代陕西(2020年23期)2021-01-07
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
学校教育研究(2020年11期)2020-06-08
现代装饰(2018年5期)2018-05-26
中国三峡(2017年2期)2017-06-09
中国洗涤用品工业(2017年2期)2017-04-16
小猕猴智力画刊(2016年12期)2017-01-05
科技传播(2015年20期)2015-03-25